Честотен метод за синтез на сау. Синтез на сау по метода на логаритмичните честотни характеристики
Прочетете също
Изпратете добрата си работа в базата знания е лесно. Използвайте формата по-долу
Студенти, докторанти, млади учени, които използват базата от знания в обучението и работата си, ще ви бъдат много благодарни.
публикувано на http://www.allbest.ru//
публикувано на http://www.allbest.ru//
Министерство на образованието и науката на Руската федерация
FSBEI HE Ивановски държавен университет по химични технологии по техническа кибернетика и автоматизация.
КУРСОВА РАБОТА
По дисциплина: Теория автоматично управление
Тема: Синтез на системи за автоматично управление
Иваново 2016г
Преходна функция на обекта на управление
Маса 1. Преходна функция на обекта на управление.
анотация
В тази курсова работа обектът на изследване е стационарен инерционен обект със закъснение, представен от преходна функция, както и система за управление за него.
Методите на изследване са елементи от теорията на автоматичното управление, математическото и симулационното моделиране.
С помощта на идентификационни, апроксимационни и графични методи са получени обектни модели под формата на трансферни функции, създаден е модел, който най-точно описва дадения обект.
След избора на обектния модел, параметрите за настройка на контролера бяха изчислени с помощта на методите на Ziegler-Nichols и разширената честотна характеристика.
За да се определи методът, чрез който са намерени най-добрите настройки за контролера на система за автоматично управление със затворен контур, неговата симулация беше извършена в Matlab средас помощта на пакета Simulink. Въз основа на резултатите от симулацията беше избран метод, с помощта на който бяха изчислени настройките на контролера, които най-добре удовлетворяват зададения критерий за качество.
Извършен е и синтез на системата за управление на многомерен обект: каскадна система за управление, комбинирана система за управление, автономна система за управление. Параметрите за настройка на PI-регулаторите, компенсаторите са изчислени, получени са реакции на типични ефекти.
Списък с ключови думи:
Обект на управление, контролер, настройки, система за управление.
Подробности за тома:
Обем на работа – стр
Брой маси-
Брой илюстрации - 32
Брой използвани източници - 3
Въведение
В тази курсова работа изходните данни са преходната функция на управляващия обект в един от динамичните канали. Необходимо е да се извърши параметрична идентификация на обекта, определен от преходната функция, чрез графичен метод, апроксимация и методи за идентификация.
Въз основа на получените данни определяме кой модел описва по-точно дадения обект. Решаването на този проблем е доста спешен проблем, тъй като често нямаме самия математически модел, а само неговата крива на ускорение.
След избора на обектния модел изчисляваме параметрите на PI контролера. Изчислението се прави с помощта на методите на Ziegler-Nichols и разширени честотни характеристики. За да се установи по какъв метод са намерени най-добри настройкиконтролер, ние използваме степента на затихване на процеса като критерий за качество.
В тази работа се извършва синтез на система за управление на многомерен обект от три типа: автономна, каскадна, комбинирана. Изчисляват се параметрите за регулиране на регулаторите, изследват се реакциите на системата по различни канали към типични влияния.
Тази курсова работа е образователна. Уменията, придобити по време на изпълнението му, могат да бъдат използвани по време на изпълнението срочна писмена работапо моделиране на системи за управление и заключителна квалификационна работа.
1. Идентификация на контролния обект
1.1 Идентификация чрез приложението Идентификация на систематакутия за инструменти
Идентификацията е дефинирането на връзката между изходните и входните сигнали на качествено ниво.
За идентификация използваме пакета System Identification ToolBox. Нека изградим модела в simulink.
Фиг.1.1.1. Схема за идентификация.
С помощта на командата ident отидете на System Identification ToolBox.
Фиг.1.1.2. Кутия с инструменти за идентификация на системата.
Импортирайте данни в System Identification ToolBox:
Фиг.1.1.3. Импортиране на данни
Получаваме коефициентите на трансферната функция:
Фиг.1.1.4. Резултати от идентификацията
К=44,9994 Т=9,0905
1.2 Напасване с кутия с инструменти за напасване на кривите
Приближението или приближението е метод, който ви позволява да изследвате числените характеристики и свойства на даден обект, намалявайки проблема до изследване на по-прости или по-удобни обекти.
За приближение използваме пакета Curve Fitting Toolbox Изграждаме модел в simulink без връзка за забавяне.
Фиг.1.2.1. Схема за извършване на апроксимацията.
С помощта на командата cftool отидете в кутията с инструменти за напасване на крива. На оста x избираме времето, а на оста y избираме изходните стойности. Описваме обекта с функцията a-b*exp(-c*x). Получаваме коефициенти a,bи s.
Фиг.1.2.2. Резултати от апроксимацията.
K=(a+b)/2=45 T=
1.3 Апроксимация чрез елементарни връзки (графичен метод)
Фиг.1.3.1. Графичен метод
Определете времето на забавяне. За да определим K, начертаваме права линия от установената стойност до оста y. За да определим времевата константа, начертаваме допирателна към кривата, докато тя се пресече с правата линия на постоянната стойност, начертаваме перпендикуляр на абсцисната ос от пресечната точка и изваждаме времето на забавяне от получената стойност.
К=45 Т=47
1.4 Сравнение на преходните функции
За да сравним трите метода, изчисляваме грешката на всеки метод, намираме сумата от квадратите на грешките и намираме дисперсията. За да направим това, ще изградим модел в simulink и ще заместим получените параметри.
Фиг.1.4.1. Сравнение на преходни функции.
Използват се три метода за получаване на параметрите на предавателната функция на обекта на изследване. Критерият за оценка на получения математически модел на обекта е дисперсията на грешката и според този показател най-добри резултатимаркирани в метода за напасване с инструмента за напасване на крива. Освен това, ние приемаме като математически модел на обекта: W=45/(1/0.022222+1)*e^(-22.5p).
2. Избор на закон за регулиране
Избираме контролера от релацията
Тъй като избираме PI контролер.
3. Синтез на АСУ от едномерен обект
3.1 Изчисляване на ACS по метода на Ziegler-Nichols
Методът на Ziegler-Nichols се основава на критерия на Nyquist. Същността на метода е да се намери такъв пропорционален регулатор, който да доведе затворената система до границата на стабилност и да се намери работната честота.
За дадена предавателна функция намираме фазово-честотната характеристика и начертаваме нейната графика.
Дефинираме работната честота като абсцисата на пресечната точка на PFC s. Работната честота е 0,082.
Ориз. 3.1.1 Намиране на работната честота
Изчислете настройките на PI контролера Изчислете коефициента Kkr:
От получената стойност изчисляваме коефициента на пропорционалност:
Изчисляваме изодромното време:
Нека намерим връзката:
Ориз. 3.1.2 Отговор на системата чрез контролен канал към стъпкова функция
Ориз. 3.1.3 Реакция на системата през канала за смущения към стъпаловидна функция
Ориз. 3.1.4 Реакция на системата през канала на смущение към импулсната функция
Ориз. 3.1.5 Реакция на системата през контролния канал към импулсната функция
Изчислете степента на затихване по формулата:
Намираме средната стойност на степента на затихване от 0,93 и сравняваме с истинската стойност от 0,85.
3.2 Изчисляване на ACS по метода на разширената честотна характеристика
Този метод се основава изцяло на използването на модифицирания критерий на Найкуист (критерий на Е. Дудников), който гласи: ако отворената система е стабилна и нейната разширена амплитудно-фазова характеристика преминава през точка с координати [-1, j0] , тогава системата със затворен контур не само ще бъде стабилна, но и ще има известна граница на стабилност, определена от степента на трептене.
- (3.2.1) разширена честотна характеристика на отворена система;
-(3.2.2) разширен PFC на отворена система.
За PI контролер разширените честотни характеристики са:
Изчисление в средата на Mathcad:
за W = 0,85 m = 0,302
Нека изчислим настройките на PI контролера в средата на Mathcad:
Нека да преминем към областта на разширените честотни характеристики на обекта. За да направите това, нека направим заместване:
Нека да преминем към областта на разширената честотна характеристика на контролера:
Разширена честотна характеристика на контролера:
Разширена фазово-честотна характеристика на регулатора:
След някои трансформации на уравнение (3.2.6) получаваме:
Нека изградим графика:
Фиг.3.2.1 Параметри на настройките, използващи метода на разширената честотна характеристика
От графиката изчисляваме максималната стойност на Kp / Tu на първия ход и съответната стойност на Kp:
Kp=0,00565 Kp/Tu=0,00034
Нека проучим реакцията на системата към типични сигнали чрез канали за управление и смущения.
Преходна функция на канала за управление:
Ориз. 3.2.2 Отговор на системата чрез контролен канал към стъпкова функция
Преходна функция през канала на смущението:
Ориз. 3.2.3 Реакция на системата през канала на смущение към стъпаловидна функция
Функция на импулсния преход в канала на смущението:
Ориз. 3.2.4 Реакция на системата чрез канала за смущение към импулсната функция
Импулсна преходна функция през контролния канал:
Ориз. 3.2.5 Отклик на системата чрез канала за управление към импулсната функция
Изчислете степента на затихване:
За преходната функция на канала за управление
За преходната функция по канала на смущението
За импулсната преходна функция по канала на смущението
За импулсната преходна функция по канала за управление
Намираме средната стойност на степента на затихване от 0,98 и сравняваме с истинската стойност от 0,85.
Използвайки метода на разширената честотна характеристика и метода на Ziegler-Nichols, бяха изчислени настройките на PI контролера и степента на затихване. Средната стойност на степента на затихване, получена по метода на Ziegler-Nichols, надвишава истинската стойност с 9,41%. Средната стойност на степента на затихване, получена по метода на разширената честотна характеристика, превишава истинската стойност с 15,29%. От това следва, че е по-добре да се използват стойностите, получени по метода на Ziegler-Nichols.
4. Синтез на системи за автоматично управление на многомерен обект
4.1 Синтез на каскадни системи за управление
Каскадните системи се използват за автоматизиране на обекти, които имат голяма инерция по канала за управление, ако е възможно да се избере междинна координата, която е по-малко инерционна по отношение на най-опасните смущения и да се използва същото управляващо действие за него, както за основния изход на обекта.
Ориз. 4.1.1 Каскадна система за управление
В този случай в системата за управление са включени два регулатора - основният (външен) регулатор, който служи за стабилизиране на основния изход на обекта y, и спомагателният (вътрешен) регулатор, предназначен да регулира спомагателната координата y1. Еталонът за спомагателния контролер е изходният сигнал на главния контролер.
Изчисляването на каскадния ACP включва определяне на настройките на главния и спомагателния контролер за зададени динамични характеристики на обекта за главния и спомагателния канал. Тъй като настройките на главния и спомагателния регулатор са взаимосвързани, те се изчисляват по итерационния метод.
На всяка стъпка на итерация се изчислява намалена едноконтурна ACP, в която един от контролерите условно се отнася до еквивалентен обект. Еквивалентният обект за главния контролер е серийна връзказатворен спомагателен кръг и главен канал за управление; неговата трансферна функция е:
(4.1.1.)
Еквивалентният обект за спомагателния регулатор е паралелното свързване на спомагателния канал и главния отворен контур. Неговата трансферна функция е:
(4.1.2.)
В зависимост от първата стъпка на итерация има два метода за изчисляване на каскадни ACP:
1-ви метод. Изчислението започва с главния регулатор. Методът се използва в случаите, когато инерцията на спомагателния канал е много по-малка от тази на основния.
На първата стъпка се приема, че работната честота на основната верига е много по-малка от тази на спомагателната. Тогава:
(4.1.3.)
Така в първото приближение настройките на главния контролер не зависят от настройките на спомагателния контролер и се намират според WE0main(p).
На втората стъпка се изчисляват настройките на спомагателния контролер за еквивалентния обект.
В случай на приблизителни изчисления, те са ограничени до първите две стъпки. За точни изчисления те продължават, докато настройките на контролера, намерени в две последователни итерации, съвпаднат с определената точност.
2-ри метод. Изчислението започва с допълнителен регулатор. На първата стъпка се приема, че външният регулатор е деактивиран, т.е.
По този начин, в първото приближение, настройките на спомагателния регулатор се намират от едноконтурния ACP за спомагателния канал за управление. На втората стъпка настройките на главния контролер се изчисляват от трансферната функция на еквивалентния обект WE1main(p), като се вземат предвид настройките на спомагателния контролер. За да се прецизират настройките на спомагателния контролер, изчислението се извършва съгласно трансферната функция, в която се заместват намерените настройки на главния контролер. Изчисленията се извършват, докато настройките на спомагателния контролер, открити в две последователни итерации, не отговарят на зададената точност.
Нека изчислим параметрите на спомагателния PI контролер:
Фиг.4.1.2. Отговор на стъпково действие чрез контролен канал
Фиг.4.1.3. Отговор на стъпково действие по канала на смущението
Фиг.4.1.4. Отговор на импулсно действие чрез канал за управление
Фиг.4.1.5. Отговор на импулсно действие през канала на смущение
Системата е ковариантна на задачата и инвариантна на смущението. Изпълнен е основният критерий за качество - вида на преходния процес. Вторият критерий за качество под формата на регулирано време не е изпълнен. Критериите са изпълнени динамична грешка.
4.2 Синтез на комбинирана система за управление
Има случай, когато върху обекта се прилагат силни въздействия, които могат да бъдат измерени, но не се предлага едноконтурна система за управление, а т. нар. комбинирана система, която е комбинация от два принципа - принципа на обратната връзка и принципа на компенсация на смущенията.
Предлага се прихващане на смущенията преди тяхното въздействие върху обекта и с помощта на спомагателен регулатор компенсиране на техните действия.
Фиг.4.2.1. Комбинирана система за управление
Приложете към веригата, показана на фиг. 4.2.1, условието за неизменност на изходната стойност y по отношение на смущаващото действие yv:
Принципът на инвариантност към смущение: за да бъде една система инвариантна към смущение, нейната предавателна функция по канала за управление трябва да е равна на нула. Тогава предавателната функция на компенсатора ще бъде написана:
(4.2.2.)
Нека изчислим PI контролера в Mathcad на контролера, използвайки стандартните биномни форми на Нютон:
Стъпка действие на контролния канал:
Фиг.4.2.2. Отговор на стъпково действие чрез контролен канал
Стъпково действие по канала на смущението:
Фиг.4.2.3. Отговор на стъпково действие по канала на смущението
Импулсно действие върху канала за управление:
Фиг.4.2.4. Отговор на импулсно действие чрез канал за управление
Импулсно действие през канала на смущението:
Фиг.4.2.5. Отговор на импулсно действие през канала на смущение
Системата е ковариантна на задачата и инвариантна на смущението. Критерият за качество под формата на време за контрол не е изпълнен. Критерият за динамична грешка не е изпълнен. Системата е инвариантна към смущение в статиката, но не е инвариантна в динамиката поради инерционните свойства на нейните съставни елементи.
4.3 Синтез автономна системауправление
Когато управляваме многомерни обекти, често срещаме следната картина:
Ориз. 4.3.1 Контролен обект с две входни и две изходни променливи
X1,X2 - управляващи променливи
Y1,Y2 - контролирани променливи
U1,U2 - директни връзки
P1,P2 - напречни връзки.
Ако за изходната променлива y1 изберем променлива x2 като контролна променлива, тогава, поради напречните канали, управляващата променлива x2 ще повлияе на променливата y1 чрез трансферната функция W21, а управляващата променлива x1 ще повлияе на y2 през W12. Тези обстоятелства значително усложняват изчисляването на такава система.
Задачата за изчисление е значително опростена, ако към системата се наложат допълнителни изисквания - изискванията за автономност на каналите за управление. Автономията на каналите за управление може да се постигне чрез въвеждане на допълнителни връзки между входните променливи, такива устройства се наричат компенсатори.
Ориз. 4.3.2 Система за управление на 2D обект
В резултат на въвеждането на компенсатори се появиха нови контролни променливи, които влияят на първоначалните променливи, като се вземат предвид компенсаторните ефекти.
Изчисляваме трансферните функции на компенсаторите:
Ние изчисляваме параметрите за настройка на PI контролерите, като използваме стандартните биномни форми на Нютон.
Нека изчислим първия PI контролер в Mathcad:
Нека изчислим втория PI контролер в Mathcad:
Преходна функция на първия контролен канал:
Ориз. 4.3.3. Отговор на системата на стъпково действие
Преходна функция на втория контролен канал:
Ориз. 4.3.4. Отговор на системата на стъпково действие
Системата е ковариантна на задачата и инвариантна на смущението. Изпълнен е основният критерий за качество - вида на преходния процес. Вторият критерий за качество е изпълнен под формата на време.
Заключение
В първия параграф на работата бяха разгледани методите, използвани за идентифициране на функциите, дадени в таблицата. Бяха разгледани три метода: методът на идентификация с помощта на System Identification ToolBox, методът на приближение с помощта на пакета Curve Fitting Toolbox и методът на елементарна апроксимация на връзката. Въз основа на резултатите от апроксимацията е избран най-адекватният модел. Оказа се, че това е модел, получен чрез приближение с помощта на Curve Fitting Tool.
След това беше определен законът за управление и настройките на PI контролера бяха изчислени с помощта на два метода: методът на разширената честотна характеристика и методът на Ziegler-Nichols. При сравняване на скоростите на затихване беше установено, че е по-добре да се използват стойностите, получени по метода на Ziegler-Nichols.
Четвъртата точка от курсовата работа беше моделирането на системи. Извършихме синтез на системи за управление на многомерен обект. За тези системи са изчислени компенсаторите на смущенията, както и PI регулаторите, за изчисляването на които са използвани стандартните биномни форми на Нютон. Получени са отговорите на системите на типичните входни действия.
Списък на използваните източници
Теория на автоматичното управление: учебник за университети / V. Ya. Rotach. - 5-то изд., преработено. и допълнителни - М .: Издателство MPEI, 2008. - 396 с., ил.
Модални устройства за управление и наблюдение / N.T. Кузовков. - М.: "Инженеринг", 1976. - 184 с.
Matlab Consulting Center [Електронен ресурс] // MATLAB.Exponenta, 2001-2014. URL: http://matlab.exponenta.ru Дата на достъп: 12.03.2016 г.
Хоствано на Allbest.ru
...Подобни документи
Анализ на алтернативен метод с разширена честотна характеристика. Внедряване на програмата в среда MatLab, за изчисляване на предавателната функция на обекта на управление, качествените параметри на преходния процес на затворената СКУД на настройките на контролера.
лабораторна работа, добавена на 05.11.2016 г
Метод на разширена честотна характеристика. Преглед на изискванията към показателите за качество. Компютърни методисинтез на системи за автоматично управление в среда Matlab. Построяване на линията на равно затихване на системата. Определение оптимални настройкирегулатор.
лабораторна работа, добавена на 30.10.2016 г
Изчисляване на осигуряване на дискретен контролер максимална скоростпреходен процес. Формиране на интегрален квадратичен критерий. Синтез на компенсатор, непрекъснат и дискретен регулатор, компенсатор, закон за оптимално управление.
курсова работа, добавена на 19.12.2010 г
Избор на контролер за обект на управление със зададена предавателна функция. Анализ на обекта на управление и системата за автоматично управление. Оценка на преходни и импулсни функции на обекта на управление. Принципни диаграмиконтролер и компаратор.
курсова работа, добавена на 03.09.2012 г
Избор, обосновка на видовете регулатори на положение, скорост, ток, изчисляване на настройките им. Синтез на системата за управление чрез методи на модален и симетричен оптимум. Построяване на преходни характеристики на обекта на регулиране по контролирани величини.
курсова работа, добавена на 01.04.2012 г
Описание на обекта за автоматично управление в променливи състояния. Определяне на дискретната предавателна функция на затворена линеаризирана аналогово-цифрова система. Графики на преходна характеристика, управляващ сигнал и честотна характеристика на системата.
курсова работа, добавена на 21.11.2012 г
Синтез на система за управление на квазистационарен обект. Математически модел на нестационарен динамичен обект. Трансферни функции на връзките на системата за управление. Построяване на търсените логаритмични амплитудно-честотни и фазово-честотни характеристики.
курсова работа, добавена на 14.06.2010 г
Определяне на динамичните характеристики на обекта. Дефиниране и изграждане на честотни и времеви характеристики. Изчисляване на оптималните настройки на ПИ регулатора. Проверка на устойчивостта по критерия на Хурвиц. Изграждане на преходния процес и неговото качество.
курсова работа, добавена на 05.04.2014 г
Изследване на режимите на системата за автоматично управление. Определяне на предавателната функция на затворена система. Построяване на логаритмични амплитудни и фазово-честотни характеристики. Синтез на системата "обект-регулатор", изчисляване на оптимални параметри.
курсова работа, добавена на 17.06.2011 г
Формулиране на изискванията към системата и изчисляване на параметрите на електрозадвижването. Синтез на токов регулатор. Изчисляване на регулатора на скоростта. Изследване на преходни процеси в подчинената система за управление с помощта на програмата "Matlab". Синтез на релейна система.
Задачата на корекцията е да подобри точността на системите както в стабилно състояние, така и в преходно състояние. Възниква, когато желанието за намаляване на грешките при управление в типични режими води до необходимостта от използване на такива стойности на усилването на система за автоматично управление с отворен цикъл, при които, без да се предприемат специални мерки (инсталиране на допълнителни връзки - коригиращи устройства) , системата става нестабилна.
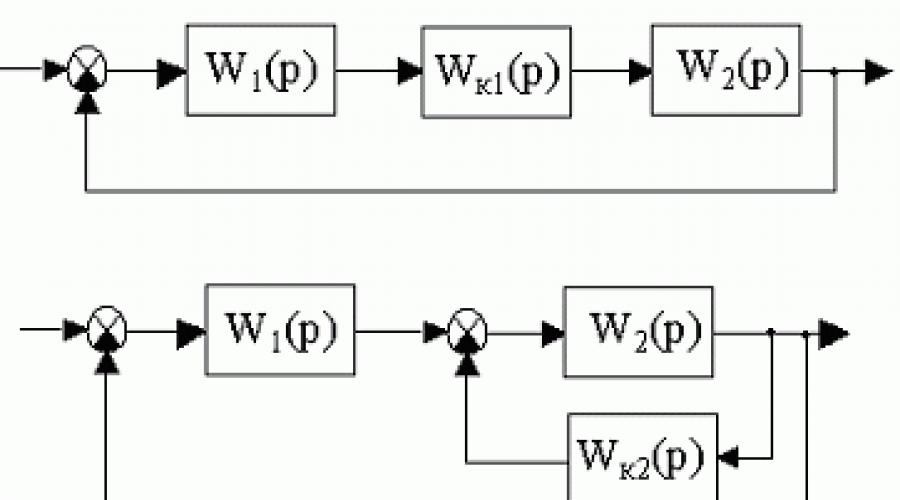
| Видове коригиращи устройства |
Има три вида основни коригиращи устройства (фиг. 6.1): последователни (W k1 (p)), под формата на локална обратна връзка (W k2 (p)) и паралелни (W k3 (p)).

Фиг.6.1. Блокови схемикоригиращи устройства.
Методът на корекция с помощта на последователни коригиращи устройства е прост в изчисленията и лесен за технически изпълнение. Така той намери широко приложение, особено при коригиране на системи, които използват електрически веригис немодулиран сигнал. Препоръчва се последователните коригиращи устройства да се използват в системи, в които няма дрейф в параметрите на връзките. В противен случай е необходима настройка на коригиращите параметри.
Корекцията на системите за управление с помощта на паралелно коригиращо устройство е ефективна, когато има нужда от високочестотно шунтиране на инерционни връзки. В този случай се формират доста сложни закони за управление с въвеждането на производни и интеграли на сигнала за грешка с всички произтичащи от това недостатъци.
Най-често в системите за автоматично управление се използва корекция чрез локална (местна) обратна връзка. Предимството на корекцията под формата на локална обратна връзка е значително отслабване на влиянието на нелинейността на характеристиките на връзките, включени в локалната верига, както и намаляване на зависимостта на настройките на контролера от дрейфа на параметрите на устройството .
Използването на един или друг вид коригиращи устройства, т.е. серийни връзки, паралелни връзки или обратна връзка, се определя от удобството на техническото изпълнение. В този случай трансферната функция на отворена система трябва да бъде една и съща с различни включвания на коригиращи връзки:
Горната формула (6.1) позволява да се преизчисли един тип корекция към друг, за да се избере най-простият и най-лесно приложимият.
Отдел за дистанционна и кореспонденция
| Синтез на ACS |
Синтезът на система е насочено изчисление, чиято цел е: да се изгради рационална структура на системата; намиране на оптималните стойности на параметрите на отделните връзки. С много възможни решенияпърво трябва да се формулира Технически изискваниякъм системата. И при определени ограничения, наложени на ACS, е необходимо да се избере критерий за оптимизация - статична и динамична точност, скорост, надеждност, енергийни разходи, цена и др.
В инженерния синтез се поставят следните задачи: постигане на необходимата точност; осигуряване на определен характер на преходните процеси. В този случай синтезът се свежда до определяне на вида и параметрите на коригиращите средства, които трябва да се добавят към неизменната част на системата, за да се осигурят качествени показатели, които не са по-лоши от посочените.
Най-широко използван в инженерната практика е методът на честотен синтез с логаритмични честотни характеристики.
Процесът на синтез на системата за управление включва следните операции:
- конструкция на еднократната LACH L 0 (ω) на изходната система W 0 (ω), състояща се от регулируем обект без регулатор и без коригиращо устройство;
- изграждане на нискочестотната част на желаната ЛАЧЧ на база изискванията за точност (астатизъм);
- изграждане на средночестотния участък на желаната ЛАЧН, осигуряващ зададено превишаване и време за управление t p ACS;
- съгласуване на ниско- със средночестотния участък на желания l.a.h. при условие че се получи най-простото коригиращо устройство;
- усъвършенстване на високочестотната част на желания L.A.H. въз основа на изискванията за осигуряване на необходимия запас на стабилност;
- определяне на типа и параметрите на последователното коригиращо устройство L ku (ω) = L W (ω) - L 0 (ω), т.к. W W (p) \u003d W ku (p) * W 0 (p);
- техническо изпълнение на коригиращи устройства. Ако е необходимо, се извършва преизчисляване за еквивалентна паралелна връзка или ОС;
- Проверително изчисляване и изграждане на преходния процес.
Изграждане на желаната Л.А.Х. произведени на парче.
Нискочестотната част на желания l.a.h. се формира от условието за осигуряване на необходимата точност на системата за управление в стационарно състояние, т.е. от условието, че стационарната грешка на системата Δ() не трябва да надвишава определената стойност Δ()≤Δ s.
Формиране на забранената нискочестотна област за желания L.A.C. Може би различни начини. Например, когато на входа се подава синусоидален сигнал, се изисква да се осигурят следните допустими показатели: Δ m - максимална амплитуда на грешката; v m - максимална скорост на проследяване; ε m - максимално проследяващо ускорение. По-рано беше показано, че амплитудата на грешката при възпроизвеждането на хармоничен сигнал Δ m =g m / W(jω k) , т.е. се определя от модула на предавателната функция на САР с отворена верига и амплитудата на входното въздействие g m . За да не превишава грешката на ACS Δ c, желаната l.a.h. трябва да преминава не под контролната точка A to с координати: ω=ω to, L(ω to)= 20lg|W(jω k)| =20lg g m /Δ m.
Известни са следните съотношения:
g(t) = g m sin(ω k t); g "(t) \u003d g m (ω k t); g "" (t) \u003d -g m ω k 2 sin (ω k t);
vm = gmk; ε m = g m ω k 2 ; g m \u003d v m 2 /ε m; ω k = ε m / v m . (6.2)
Забранената област, съответстваща на системата с астатизъм от 1-ви ред и осигуряваща работа с необходимата грешка в амплитудата на проследяване, скоростта на проследяване и ускорението, е показана на фиг. 6.2.

Фиг.6.2. Забранена зона на желаната л.а.ч.
Коефициент на качество за скорост K ν =v m / Δ m , фактор на качеството за ускорение K ε =ε m / Δ m . В случай, че се изисква да се осигури само статична контролна грешка, когато сигналът g(t)=g 0 =const е приложен към входа, тогава нискочестотната част на желания L.A.C. трябва да има наклон от 0 dB/dec и да преминава на ниво от 20lgK tr, където K tr (необходимото усилване на ACS с отворена верига) се изчислява по формулата
Δ s ()=ε st =g 0 /(1+ K tr), откъдето K tr ≥ -1.
Ако се изисква да се осигури проследяване с дадена точност от задвижващото влияние g(t)=νt при ν=const, тогава грешката на скоростта в стационарно състояние ε sk () =ν/K tr. Оттук се намира K tr =ν/ε ck и нискочестотната част на желаната LAH се изчертава с наклон от -20 dB/dec през фактора за качество на скоростта K ν = K tr =ν/ε ck или a точка с координати: ω=1 c -1, L( 1)=20lgk trdb.
Както беше показано по-рано, средночестотната област на желания L.A.C. осигурява основните показатели за качеството на преходния процес - превишаване σ и контролно време t p. трябва да има наклон от -20 dB/dec и да пресича честотната ос при граничната честота ω cf, която се определя от номограмите на В. В. Солодовников (фиг. 6.3). Препоръчва се да се вземе предвид редът на астатизъм на проектираната система и да се избере ω cf според съответната номограма.

Фиг.6.3. Номограми на качеството на Солодовников:
а - за астатични самоходни оръдия от 1-ви ред; b - за статични ACS
Например, за σ m = 35% и t p = 0,6 s, използвайки номограмата (фиг. 6.3, а) за астатична система от 1-ви ред, получаваме t p = 4,33 π / ω sr или ω sr = 21,7 s -1 .
Чрез ω cf =21,7 s -1 е необходимо да се начертае права линия с наклон -20 dB/dec, а ширината на средночестотния участък се определя от условието за осигуряване на необходимия запас на стабилност в абсолютна стойност и фаза. Има различни подходи за определяне на границите на стабилност. Трябва да се помни, че колкото по-висока е граничната честота в системата, толкова по-вероятнофактът, че при изчисленията ще се отрази грешката на малки времеви константи на отделни ACS устройства, които не се вземат предвид. Поради това се препоръчва изкуствено увеличаване на границите на стабилност във фаза и модул с увеличаване на ω cf. Така че за два вида ACS се препоръчва да се използва дадената таблица. При високи изисквания към качеството на преходните процеси, напр.
20%<σ m <24%;  ,
,
25%<σ m <45%;  ,
,
препоръчват се следните средни показатели за стабилност: φ zap =30°, H m =12 dB, -H m =10 dB.
Фигура 6.4 показва изглед на средночестотния участък на желания L.A.H., чиято ширина осигурява необходимите граници на стабилност.

Фиг.6.4. Средночестотната част на желания l.a.h.
След това секциите със средни и ниски честоти се съпоставят със сегменти от прави линии с наклони от -40 или -60 dB/dec от условието за получаване на най-простото коригиращо устройство.
Наклонът на високочестотния участък на желания l.a.h. препоръчително е да се остави равен на наклона на високочестотния участък на наличния LAC. В този случай коригиращото устройство ще бъде по-устойчиво на шум. Съпоставяне на средно- и високочестотните секции на желания L.A.H. също се извършва, като се вземе предвид получаването на просто коригиращо устройство и в допълнение, осигуряване на необходимите граници на стабилност.
Трансферната функция на желаната отворена система W W (p) се намира от формата на желаната L.A.H. L W (ω). След това се изгражда фазово-честотната характеристика на желаната отворена ACS и преходната характеристика на желаната затворена система и се оценяват реално получените качествени показатели на проектираната система. Ако те удовлетворяват изискваните стойности, тогава изграждането на желания L.A.Ch. се счита за завършен, в противен случай конструираният желан LFC трябва да бъде коригиран. За да се намали превишаването, средната честота на желаната L.A.H. се разширява. (увеличете стойността ±H m). За да подобрите производителността на системата, трябва да увеличите честотата на прекъсване.
За определяне на параметрите на последователно коригиращо устройство е необходимо:
а) извадете от желания l.a.h. L w еднократна употреба l.a.h. L 0 , т.е. намери l.a.h. минимално-фазово коригиращо устройство L ku;
б) от вида на L.a.h. последователно коригиращо устройство L ku напишете неговата трансферна функция и с помощта на справочната литература изберете конкретна схема и изпълнение.
Фигура 6.5 показва пример за определяне на предавателната функция на последователно коригиращо устройство.

Фиг.6.5. LAH наличен L 0 , желана L w система с отворена верига
и последователно коригиращо устройство L ku
След графично изваждане получаваме следната трансферна функция на коригиращото устройство

Паралелно коригиращо устройство или коригиращо устройство под формата на локална обратна връзка може да се получи чрез преизчисляване по формула (6.1).
Въз основа на получената предавателна функция W ku (p) е необходимо да се проектира реално коригиращо устройство, което може да бъде реализирано хардуерно или софтуерно. При хардуерно изпълнение е необходимо да се избере схемата и параметрите на коригиращата връзка. Литературата съдържа таблици на типични коригиращи устройства, както пасивни, така и активни, както на постоянен, така и на променлив ток. В случай, че се използва за управление на автоматична система за управление на компютър, тогава софтуерната реализация е за предпочитане.
© В.Н. Бакаев, Вологда 2004. Разработване на електронната версия: М. А. Гладишев, И. А. Чуранов.
Вологодски държавен технически университет.
Отдел за дистанционно и кореспондентско обучение
Понастоящем широко се използват системи, изградени на принципа на подчиненото регулиране, което е обяснено на фиг. 6.6. Системата осигурява n контролни контура с техните контролери W pi (p), а изходният сигнал на контролера на външния контур е зададената стойност за вътрешния контур, т.е. работата на всяка вътрешна верига е подчинена на външната верига.

Фиг.6.6. Структурна схема на ACS на подчинено регулиране
Две основни предимства определят работата на подчинените системи за управление.
1. Лесен за изчисляване и настройка. Регулирането при пускане в експлоатация се извършва от вътрешния контур. Всяка верига включва регулатор, благодарение на параметрите и структурата на който се получават стандартни характеристики. Освен това във всяка верига се компенсира най-голямата времеконстанта.
2. Удобство за ограничаване на граничните стойности на междинните координати на системата. Това се постига чрез ограничаване на изходния сигнал на външния контурен контролер до определена стойност.
В същото време от принципа на изграждане на подчинена система за управление е очевидно, че скоростта на всяка външна верига ще бъде по-ниска от скоростта на съответната вътрешна верига. Наистина, ако в първичната верига граничната честота на L.A.C. ще бъде 1/2T μ, където 2T μ е сумата от малки некомпенсирани времеви константи, тогава дори при липса на други връзки с малки времеви константи във външната верига, граничната честота на нейния L.A.C. ще бъде 1/4T μ и т.н. Следователно подчинените системи за управление рядко се изграждат с повече от три вериги.
Нека вземем типична схема на фиг. 6.7 и я настроим за модулен (MO) и симетричен (CO) оптимум.

Фиг.6.7. Типична електрическа схема
В диаграмата на фиг.6.7 са посочени: T μ - сумата от малки времеконстанти;
T около - голяма времеконстанта, която трябва да бъде компенсирана; K ε и K O са съответно коефициентите на усилване на блоковете с малки времеви константи и контролния обект. Трябва да се отбележи, че типът на контролера W p (p) също зависи от типа връзка, чиято времеконстанта трябва да бъде компенсирана. Може да бъде P, I, PI и PID. Да вземем за пример PI контролер:
![]() .
.
За модулен оптимум избираме параметрите:
![]()
Тогава функцията за пренос на отворена верига ще изглежда така:
![]()
Логаритмичните честотни характеристики, съответстващи на предавателната функция W(p), са показани на фиг. 6.8, а.

Фиг.6.8. LFC и h(t) с модулна настройка
При поетапно контролно действие изходната стойност за първи път достига постоянна стойност след време от 4,7Tμ, превишаването е 4,3%, а фазовият марж е 63 ° (фиг. 6.8, b). Предавателната функция на затворена ACS има формата

Ако представим характеристичното уравнение на затворена ACS във формата Т 2 р 2 +2ξТр+1=0, тогава коефициентът на затихване при модулния оптимум има стойността ![]() . В същото време се вижда, че времето за регулиране не зависи от голямата времеконстанта T o. Системата има астатизъм от първи ред. При настройка на системата за симетричен оптимум параметрите на PI контролера се избират, както следва:
. В същото време се вижда, че времето за регулиране не зависи от голямата времеконстанта T o. Системата има астатизъм от първи ред. При настройка на системата за симетричен оптимум параметрите на PI контролера се избират, както следва:
![]()
Тогава функцията за предаване на отворена верига има формата


Съответстващите му логаритмични честотни характеристики и графиката на преходния процес са представени на фиг. 6.9.

Фиг.6.9. LFC и h(t), когато са настроени към симетричен оптимум
Времето на първото постигане на изходната стойност на постоянната стойност е 3,1T μ, максималното превишаване достига 43%, границата на фазата е -37°. ACS придобива астатизъм от втори ред. Трябва да се отбележи, че ако връзката с най-голяма времеконстанта е апериодична от 1-ви порядък, то при PI регулатор при T o =4T μ преходните процеси съответстват на процесите при настройка на МО. Ако T o<4Т μ , то настройка регулятора на τ=Т μ теряет смысл. Необходимо выбрать другой тип регулятора.
В TAU са известни и други видове оптимални настройки на контролера, например:
- бином, когато характеристичното уравнение на ACS е представено като (p + ω 0) n - където ω 0 е модулът на n - кратния корен;
- Бътъруърт, когато характеристичните уравнения на ACS от различни поръчки имат формата 
Препоръчително е да използвате тези настройки, когато системата използва модален контрол за всяка координата.
© В.Н. Бакаев, Вологда 2004. Разработване на електронната версия: М. А. Гладишев, И. А. Чуранов.
Вологодски държавен технически университет.
| Изграждане на преходния процес |
Има три групи методи за конструиране на преходни процеси: аналитични; графичен, използващ честотни и преходни характеристики; изграждане на преходни процеси с помощта на компютър. В най-сложните случаи се използват компютри, които позволяват, освен моделиране на ACS, да се свържат отделни части от реална система към машината, т.е. близо до експерименталния метод. Първите две групи се използват главно в случай на прости системи, както и на етапа на предварителни изследвания със значително опростяване на системата.
Аналитичните методи се основават на решаване на диференциалните уравнения на системата или определяне на обратното преобразуване на Лаплас на предавателната функция на системата.
Изчисляването на преходни процеси по честотни характеристики се използва, когато анализът на системата за автоматично управление от самото начало се извършва чрез честотни методи. В инженерната практика, за оценка на показателите за качество и конструиране на преходни процеси в системи за автоматично управление, методът на трапецовидни честотни характеристики, разработен от В. В. Солодовников, стана широко разпространен.
Установено е, че ако върху системата действа едно главно действие, т.е. g(t)=1(t), а началните условия са нула, тогава отговорът на системата, който е преходен отговор, в този случай може да се дефинира като
 (6.3)
(6.3)
 (6.4)
(6.4)
където P(ω) е реалната честотна характеристика на затворената система; Q(ω) - въображаема честотна характеристика на затворена система, т.е. Ф g (jω)=P(ω)+jQ(ω).
Методът на конструиране се състои в разделянето на построената реална характеристика P(ω) на поредица от трапеци, като се заменят приблизително извити линии с прави сегменти, така че при добавяне на всички ординати на трапеца се получава оригиналната характеристика Фиг. 6.10.

Фиг.6.10. Реална характеристика на затворена система
където: ω рi и ω срi - съответно равномерната честота на предаване и граничната честота на всеки трапец.
След това за всеки трапец се определя коефициентът на наклона ω рi /ω срi и по таблицата на h-функциите се изграждат преходни процеси от всеки трапец hi. Таблицата на h-функциите дава безразмерното време τ. За да се получи реално време t i, е необходимо да се раздели τ на граничната честота на дадения трапец. Процесът на преход за всеки трапец трябва да се увеличи с P i (0) пъти, защото в таблицата на h-функциите са дадени преходни процеси от единични трапеци. Преходният процес на ACS се получава чрез алгебрично сумиране на конструираните h i процеси от всички трапеци.
© В.Н. Бакаев, Вологда 2004. Разработване на електронната версия: М. А. Гладишев, И. А. Чуранов.
Вологодски държавен технически университет.
Отдел за дистанционно и кореспондентско обучение
| Въпроси по тема номер 6 |
1. Какво се има предвид под подобряване на качеството на управленския процес и как се постига това?
2. Наименувайте линейния стандартен закон за управление.
3. Разкажете ни за типичните закони за контрол и типичните регулатори.
4. Какво е предназначението на коригиращите устройства? Посочете начините за тяхното включване и характеристики.
5. Обяснете формулировката на проблема за системния синтез.
6. Избройте етапите на системния синтез.
7. Обяснете конструкцията на желания LAH на проектираната система.
8. Как се формира предавателната функция на проектирана система с отворен цикъл?
9. Как се определят предавателните функции на коригиращите устройства?
10. Какви са предимствата и недостатъците на паралелните и последователните коригиращи устройства?
11. Как се използват "затварящи" номограми?
12. Избройте методите за конструиране на преходни процеси.
13. Как да се определи постоянната стойност на преходния процес по реалната характеристика?
14.Как да сменим желания л.а.ч. за увеличаване на границите на устойчивост?
© В.Н. Бакаев, Вологда 2004. Разработване на електронната версия: М. А. Гладишев, И. А. Чуранов.
Вологодски държавен технически университет.
Отдел за дистанционно и кореспондентско обучение
Тема #7: Нелинейни САР
| Въведение |
Повечето от характеристиките на реалните устройства като цяло са нелинейни и някои от тях не могат да бъдат линеаризирани, т.к имат прекъсвания от втори род и частично-линейната апроксимация е неприложима за тях. Работата на реални връзки (устройства) може да бъде придружена от такива явления като насищане, хистерезис, обратна реакция, наличие на мъртва зона и др. Нелинейностите могат да бъдат естествени и изкуствени (съзнателно въведени). Естествените нелинейности са присъщи на системите поради нелинейното проявление на физическите процеси и свойствата на отделните устройства. Например механичната характеристика на асинхронен двигател. Изкуствените нелинейности се въвеждат в системите от разработчиците, за да осигурят необходимото качество на работа: релейно управление се използва за системи, които са оптимални по отношение на производителността, наличието на нелинейни закони в екстремалните системи за търсене и без търсене, системи с променлива структура, и т.н.
Нелинейна системанарича се такава система, която включва поне един елемент, чиято линеаризация е невъзможна, без да се загубят основните свойства на системата за управление като цяло. Съществените характеристики на нелинейността са: ако някои координати или техните производни по време влизат в уравнението под формата на продукти или степени, различни от първите; ако коефициентите на уравнението са функции на някои координати или техни производни. Когато се съставят диференциални уравнения за нелинейни системи, диференциалните уравнения първо се съставят за всяко устройство в системата. В този случай характеристиките на устройствата, които позволяват линеаризация, са линеаризирани. Елементите, които не позволяват линеаризация, се наричат по същество нелинеен. Резултатът е система от диференциални уравнения, в която едно или повече уравнения са нелинейни. Устройствата, които могат да бъдат линеаризирани, образуват линейната част на системата, а устройствата, които не могат да бъдат линеаризирани, съставляват нелинейната част. В най-простия случай блоковата схема на ACS на нелинейна система е последователно свързване на неинерционен нелинеен елемент и линейна част, покрита с обратна връзка (фиг. 7.1). Тъй като принципът на суперпозиция не е приложим за нелинейни системи, тогава, когато се извършват структурни трансформации на нелинейни системи, единственото ограничение в сравнение със структурните трансформации на линейни системи е, че е невъзможно да се прехвърлят нелинейни елементи през линейни и обратно.

Ориз. 7.1. Функционална схема на нелинейна система:
NE - нелинеен елемент; LCH - линейна част; Z(t) и X(t)
съответно изхода и входа на нелинейния елемент.
Възможна е класификация на нелинейните връзки по различни критерии. Най-разпространената класификация се основава на статични и динамични характеристики. Първите се представят под формата на нелинейни статични характеристики, а вторите - под формата на нелинейни диференциални уравнения. Примери за такива характеристики са дадени в. На фиг.7.2. дадени са примери за еднозначни (без памет) и многозначни (с памет) нелинейни характеристики. В този случай се взема предвид посоката (знакът) на скоростта на сигнала на входа.

Фиг.7.2. Статични характеристики на нелинейни елементи
Поведението на нелинейните системи при наличие на значителни нелинейности има редица характеристики, които са различни от поведението на линейните ACS:
1.
изходната стойност на нелинейната система е непропорционална на входното действие, т.е. параметрите на нелинейните връзки зависят от големината на входното въздействие;
2.
преходните процеси в нелинейните системи зависят от началните условия (отклонения). В тази връзка за нелинейните системи се въвеждат понятията устойчивост „в малкото“, „в голямото“, „като цяло“. Системата е устойчива "в малкото", ако е устойчива при малки (безкрайно малки) начални отклонения. Системата е стабилна "в голямо", ако е стабилна за големи (крайни по големина) начални отклонения. Системата е стабилна "като цяло", ако е стабилна за всякакви големи (неограничени по големина) първоначални отклонения. Фигура 7.3 показва фазовите траектории на системи: стабилни "като цяло" (а) и системи, стабилни "в голямо" и нестабилни "в малко" (б);

Фиг.7.3. Фазови траектории на нелинейни системи
3.
нелинейните системи се характеризират с режим на незатихващи периодични трептения с постоянна амплитуда и честота (автоколебания), който възниква в системите при липса на периодични външни въздействия;
4.
при затихнали колебания на преходния процес в нелинейни системи е възможна промяна в периода на колебания.
Тези особености са довели до липсата на общи подходи при анализа и синтеза на нелинейни системи. Разработените методи позволяват решаването само на локални нелинейни задачи. Всички инженерни методи за изследване на нелинейни системи се разделят на две основни групи: точни и приблизителни. Точните методи включват метода на А. М. Ляпунов, метода на фазовата равнина, метода на точковите трансформации, честотния метод на В. М. Попов. Приблизителните методи се основават на линеаризацията на нелинейните уравнения на системата с помощта на хармонична или статистическа линеаризация. Границите на приложимост на този или онзи метод ще бъдат разгледани по-долу. Трябва да се отбележи, че в обозримо бъдеще има нужда от по-нататъшно развитие на теорията и практиката на нелинейните системи.
Мощен и ефективен метод за изследване на нелинейни системи е симулацията, чийто инструментариум е компютър. Понастоящем много теоретични и практически проблеми, които са трудни за аналитично решение, могат да бъдат сравнително лесно решени с помощта на компютърни технологии.
Основните параметри, характеризиращи работата на нелинейните ACS са:
1.
Наличие или отсъствие на собствени колебания. Ако има собствени трептения, тогава е необходимо да се определи тяхната амплитуда и честота.
2.
Времето за влизане на контролирания параметър в режим на стабилизиране (скорост).
3.
Наличието или отсъствието на плъзгащ режим.
4.
Дефиниране на специални точки и специални траектории на движение.
Това не е пълен списък на изследваните параметри, които съпътстват работата на нелинейни системи. Екстремните, самонастройващи се системи с променливи параметри изискват оценка и допълнителни свойства.
© В.Н. Бакаев, Вологда 2004. Разработване на електронната версия: М. А. Гладишев, И. А. Чуранов.
Вологодски държавен технически университет.
Отдел за дистанционно и кореспондентско обучение.
Идеята за метода на хармоничната линеаризация принадлежи на N.M. Крилов и Н.Н. Боголюбов и се основава на замяна на нелинеен елемент на системата с линейна връзка, чиито параметри се определят при хармонично входно действие от условието за равенство на амплитудите на първите хармоници на изхода на нелинейния елемент и неговия еквивалент линейна връзка. Методът е приблизителен и може да се използва само когато линейната част на системата е нискочестотен филтър, т.е. филтрира всички хармонични компоненти, възникващи на изхода на нелинейния елемент, с изключение на първия хармоник. В този случай линейната част може да бъде описана с диференциално уравнение от всякакъв ред, а нелинейният елемент може да бъде еднозначен или многозначен.
Методът на хармонична линеаризация (хармоничен баланс) се основава на предположението, че на входа на нелинеен елемент се прилага хармоничен ефект с честота ω и амплитуда A, т.е. x = A sinωt. Ако приемем, че линейната част е нискочестотен филтър, спектърът на изходния сигнал на линейната част е ограничен само от първия хармоник, определен от реда на Фурие (това е приближението на метода, тъй като по-високите хармоници са изключени от разглеждането ). Тогава връзката между първия хармоник на изходния сигнал и входния хармоничен ефект на нелинейния елемент се представя като трансферна функция:
![]() (7.1)
(7.1)
Уравнение (7.1) се нарича уравнение на хармонична линеаризация, а коефициентите q и q са коефициентите на хармонична линеаризация в зависимост от амплитудата A и честотата ω на входното действие. За различни видове нелинейни характеристики коефициентите на хармонична линеаризация са обобщени в таблицата. Трябва да се отбележи, че за статични коефициенти с една стойност q "(A) \u003d 0. Подлагайки уравнение (7.1) на трансформацията на Лаплас при нулеви начални условия, последвано от замяната на оператора p с jω (p = jω), получаваме еквивалентния комплексен коефициент на предаване на нелинейния елемент
Wne (jω,A) = q + jq". (7.2)
След като хармоничната линеаризация е извършена, за анализ и синтез на нелинейни ACS е възможно да се използват всички методи, използвани за изследване на линейни системи, включително използването на различни критерии за стабилност. При изучаването на нелинейни системи, базирани на метода на хармоничната линеаризация, на първо място се решава въпросът за съществуването и стабилността на периодични (автоколебателни) режими. Ако периодичният режим е устойчив, тогава в системата има собствени трептения с честота ω 0 и амплитуда A 0 . Помислете за нелинейна система, която включва линейна част с предавателна функция
 (7.3)
(7.3)
и нелинеен елемент с еквивалентно комплексно усилване (7.2). Проектната структурна схема на нелинейна система има формата на фиг. 7.5.

Фиг.7.5. Структурна схема на нелинейна САР
За да се оцени възможността за автоколебания в нелинейна система, използвайки метода на хармоничната линеаризация, е необходимо да се намерят условията за границата на стабилност, както беше направено при анализа на устойчивостта на линейни системи. Ако линейната част е описана от трансферната функция (7.3), а нелинейният елемент (7.2), тогава характеристичното уравнение на затворената система ще има формата
d(p) + k(p)(q(ω,A) + q"(ω,A)) = 0 (7.4)
Въз основа на критерия за стабилност на Михайлов, границата на стабилност ще бъде преминаването на ходографа на Михайлов през началото. От изрази (7.4) може да се намери зависимостта на амплитудата и честотата на собствените трептения от параметрите на системата, например от коефициента на предаване k на линейната част на системата. За да направите това, в уравнения (7.4) коефициентът на пренос k трябва да се счита за променлива, т.е. напишете това уравнение във формата:
d(jω) + K(jω)(q(ω,A) + q"(ω,A)) = Re(ω 0,A 0,K) + Jm(ω 0,A 0,k) = 0 (7.5)
където ω o и A o - възможна честота и амплитуда на собствените трептения.
След това, приравнявайки към нула реалната и имагинерната част на уравнение (7.5)
 (7.6)
(7.6)
Усъвършенстване на блоковата схема на системата за управление за избор и изчисляване на нейните елементи и параметри. Експериментално изследване на системата или отделните й части в лабораторни условия и внасяне на съответните корекции в нейната схема и конструкция. Проектиране и производство на системата за управление. Настройка на системата в реални работни условия пробна експлоатация.
Споделете работата си в социалните мрежи
Ако тази работа не ви подхожда, има списък с подобни произведения в долната част на страницата. Можете също да използвате бутона за търсене
Лекция №6 Синтез на системи за автоматично управление
СИНТЕЗ НА СКУД избор на структура и параметри на СКУД, начални условия и входни въздействия в съответствие с изискваните качествени показатели и условия на работа.
Дизайнът на ACS включва следните стъпки:
- Изследване на обекта на регулиране: изготвяне на математически модел, определяне на параметрите, характеристиките и условията на експлоатация на обекта.
- Формулиране на изискванията за ATS.
- Избор на принцип на управление; определяне на функционалната структура (технически синтез).
- Изборът на елементи на схемата за управление, като се вземат предвид статични, динамични, енергийни, оперативни и други изисквания и тяхната координация помежду си по отношение на статични и енергийни характеристики (процедурата не е формализирана - инженерно творчество).
- Дефинирането на алгоритмичната структура (теоретичен синтез) се извършва с помощта на математически методи и въз основа на изисквания, написани в ясна математическа форма. Определяне на закони за регулиране и изчисляване на коригиращи устройства, които осигуряват определени изисквания.
- Усъвършенстване на блоковата схема на системата за управление, избор и изчисляване на нейните елементи и параметри.
- Експериментално изследване на системата (или нейните отделни части) в лабораторни условия и внасяне на съответните корекции в нейната схема и конструкция.
- Проектиране и производство на системата за управление.
- Настройка на системата в реални работни условия (пробна експлоатация).
Проектирането на ACS започва с избора на обекта за управление и основните функционални елементи (усилватели, изпълнителни механизми и др.), Тоест, разработва се силовата част на системата.
Посочените статични и динамични характеристики на системата се осигуряват чрез правилния избор на структурата и параметрите на силовия блок, специални коригиращи устройства и цялата СКУД като цяло.
Предназначение на коригиращите устройства: осигуряване на необходимата точност на системата и получаване на приемлив характер на преходния процес.
Коригиращите връзки се въвеждат в системата по различни начини: последователно, локална защита на околната среда, директна паралелна връзка, външни (извън контролния контур) компенсиращи устройства, покритие на цялата ACS, стабилизираща защита на околната среда, неединична основна обратна връзка.
Видове DC електрически коригиращи устройства: активни и пасивни DC четириполюсници, диференциращи трансформатори, DC тахогенератори, тахометрични мостове и др.
С уговорка коригиращите устройства се класифицират:
- СТАБИЛИЗИРАЩИ гарантират стабилността на СКУД и подобряват статичните и динамичните им характеристики;
- КОМПЕНСИРАЩИ намаляват статичните и динамичните грешки при изграждане на ACS по комбиниран принцип;
- ФИЛТРИРАНЕ Подобряване на шумоустойчивостта на системите, например филтриране на висши хармоници по време на демодулация на сигнала на директния канал;
- СПЕЦИАЛИЗИРАН да придаде на системата специални свойства, които подобряват качеството на системата.
ACS може да бъде изградена съгласно следните блокови схеми:
- Със серийна коригираща верига.
Усилвателят Y трябва да има голям входен импеданс, за да не шунтира изхода на коригиращата верига.
Използва се в случай на бавно променящи се входни действия, тъй като при големи несъответствия възниква насищане в реални нелинейни елементи, граничната честота отива наляво и системата бавно напуска състоянието на насищане.
Фиг. 1.
Последователната корекция често се използва в системите за стабилизиране или за корекция на контура с коригираща обратна връзка.
Намалява.

- С антипаралелна коригираща верига.

Фиг.2.
Той влиза на входа като разлика и не се получава дълбоко насищане.
- С последователно-паралелна коригираща верига.

Фиг.3.
- С комбинирани коригиращи вериги.
Синтезът на ACS на подчинено управление с два или повече контура се осъществява чрез последователна оптимизация на контурите, като се започне от вътрешния.
Изчисляването на системите е разделено на 2 етапа:статичен и динамичен.
Статично изчислениесе състои в избора на основните връзки на системата, включени в нейната главна верига, изготвяне на блокова схема на последната и определяне на параметрите на основните елементи на системата (коефициенти на усилване, които осигуряват необходимата точност, времеви константи на всички елементи, предавка съотношения, предавателни функции на отделни връзки, мощност на двигателя). В допълнение, това включва изчисляване и проектиране на магнитни и полупроводникови усилватели и избор на транзисторни или тиристорни преобразуватели, двигатели, сензорни елементи и други спомагателни устройства на системите, както и изчисляване на точността при работа в стационарно състояние и чувствителността на системата.
Динамично изчислениевключва голям набор от въпроси, свързани със стабилността и качеството на преходния процес (скорост, работни характеристики и динамична точност на системата). В процеса на изчисление се избират коригиращи вериги, местата на тяхното включване и се определят параметрите на последните. Изчислява се и кривата на преходния процес или се моделира системата, за да се прецизират получените качествени показатели и да се вземат предвид някои нелинейности.
Платформи, върху които се изграждат стабилизиращи алгоритми:
- Класически (диференциални уравнения - времеви и честотни методи);
- Размита логика;
- Невронни мрежи;
- Генетични алгоритми и алгоритми за колонии от мравки.
Методи за синтез на регулатор:
- Класическа схема;
- PID контролери;
- Метод за поставяне на стълбове;
- LCH метод;
- Комбинирано управление;
- Много стабилизиращи контроли.
Класически регулаторен синтез
Класическата блокова схема на управление на обекта е показана на фиг. 1. Обикновено регулаторът се включва пред обекта.

Ориз. 1. Класическа блокова схема на управление на обект
Задачата на системата за управление е да потиска действието на външни смущения и да осигурява висококачествени преходни процеси. Тези задачи често са противоречиви. Всъщност трябва да стабилизираме системата, така че да има необходимите трансферни функции за главното действие и за канала на смущението:
, .
За да направим това, можем да използваме само един регулатор, така че такава система се нарича система с една степен на свобода.
Тези две предавателни функции са свързани с равенството
Следователно, променяйки една от предавателните функции, ние автоматично променяме и втората. Следователно те не могат да се формират самостоятелно и решението винаги ще бъде някакъв вид компромис.
Да видим дали е възможно да се осигури нулева грешка в такава система, тоест абсолютно точно проследяване на входния сигнал. Трансферната функция погрешно е равна на
Да направя грешкаВинаги е нула, тази трансферна функция трябва да бъде нула. Тъй като числителят му не е нула, веднага получаваме, че знаменателят трябва да отиде до безкрайност. Можем да повлияем само на регулатора, така че получаваме. По този начин,за намаляване на грешката
увеличете усилването на контролера.
Не можете обаче да увеличавате печалбата безкрайно. Първо, всички реални устройства имат максимално допустими стойности за входни и изходни сигнали. Второ, при голямо усилване на веригата качеството на преходните процеси се влошава, влиянието на смущенията и шума се увеличава, системата може да загуби стабилност. Следователно, във верига с една степен на свобода е невъзможно да се осигури нулева грешка при проследяване.
Нека да разгледаме проблема от гледна точка на честотните характеристики. От една страна, за висококачествено проследяване на главния сигнал е желателно честотната характеристика да бъде приблизително равна на 1 (в този случай). От друга страна, от гледна точка на здрава стабилност, е необходимо да се осигури при високи честоти, където грешката на симулацията е голяма. В допълнение, функцията за предаване на смущенията трябва да бъде такава, че тези смущения да бъдат потиснати, в идеалния случай трябва да осигурим.
Изборът на компромисно решение обикновено се процедира по следния начин:
● при ниска честоти постигат изпълнение на условието, което осигурява добро проследяване на нискочестотни сигнали; в този случай, т.е. нискочестотните смущения се потискат;
● на високо честотите се търсят така, че да осигурят стабилна стабилност и потискане на шума от измерването; в този случай, тоест системата действително работи като отворена верига, регулаторът не реагира на високочестотни смущения.
Изчисляване на линейни системи за непрекъснато автоматично управление за зададена точност
В стационарно състояние
Едно от основните изисквания, на които трябва да отговаря АСУ, е да осигури необходимата точност на възпроизвеждане на главния (управляващ) сигнал в стационарен режим на работа.
Редът на астатизма и коефициентът на пренос на системата се намират въз основа на изискванията за точност в стационарно състояние.Ако коефициентът на предаване на системата, определен от необходимата стойност на спадане и качествен фактор (в случай на астатична ACS), се окаже толкова голям, че значително усложнява дори простата стабилизация на системата, препоръчително е да се увеличи ред на астатизъм и по този начин да намали дадената грешка в стационарно състояние до нула, независимо от стойността на коефициента на предаване на системата. В резултат на това става възможно да се избере стойността на този коефициент въз основа само на съображения за стабилност и качество на преходните процеси.
Нека структурната схема на ACS се сведе до формата

Тогава, в квазистационарния режим на работа на ACS, несъответствието може да бъде представено като конвергентна серия
където играят ролята на тегловни константи.
Очевидно такъв процес може да се осъществи само ако е бавно променяща се и достатъчно гладка функция.
Ако представим предавателната функция на система с отворена верига като
тогава за r =0
за r =1
за r =2
за r =3
Нискочестотната част на логаритмичните амплитудни честотни характеристики определя точността на системата при обработка на бавно променящи се управляващи сигнали в стационарно състояние и се определя от процентите на грешки. Степента на грешки вече не оказва значително влияние върху точността на ACS и те могат да бъдат пренебрегнати при практическите изчисления.
1. Изчисляване на стационарната работа на САУ по зададените коефициенти на несъответствие (грешки)
Точността на работата на системата в стабилно състояние се определя от стойността на коефициента на пренос на отворената система, която се определя в зависимост от формата на задаване на изискванията за точност на системата.
Изчислението се извършва по следния начин.
- СТАТИЧЕН ATS. Тук се задава стойността на коефициента на позиционна грешка, по която се определя: .
dB
20 lgk бр
ω, s -1
- АСТАТИЧНИ СИСТЕМИ от 1-ви ред.
В този случай е даден коефициентът, който определя
Ако коефициентите и са дадени, тогава, което определя позицията на нискочестотната асимптота на LAFC на отворена система с наклон от -20 dB/dec, а втората асимптота има наклон от -40 dB/dec в ъгъла честота (фиг. 1).

Фиг. 1.
- АСТАТИЧНИ СИСТЕМИ от 2-ри ред.
По даден коефициент определяме kpc:
dB
ω, s -1
2. Изчисляване на стационарния режим на работа на СКУД според зададената максимална стойност на несъответствието (грешката) на системата
Въз основа на допустимата стойност на стационарната грешка и вида на управляващото въздействие се избират параметрите на нискочестотната част на LAF на системата.
- Нека е дадена допустимата максимална грешка при хармонично действие с амплитуда и честота и реда на астатизма на системата.
Тогава нискочестотната LAFC асимптота на системата трябва да минава не по-ниско от контролната точка с координати:
(1)
и имат наклон -20 r dB/dec. Зависимост (1) е валидна при.
- Нека са дадени допустимата максимална грешка при максималната скорост и максималното ускорение на входното действие и редът на астатизма r системи.
Често е удобно да се използва методът на еквивалентно синусоидално действие, предложен от Ya.E. Гукайло.
В този случай се определя режим, при който амплитудите на скоростта и ускорението са равни на максималните зададени стойности. Нека входното действие се променя в съответствие с дадения закон
. (2)
Приравнявайки амплитудните стойности на скоростта и ускорението, получени чрез диференциране на израз (2), към дадените стойности и получаваме
където, . Тези стойности могат да се използват за конструиране на контрола
точка В с координати и
С една единствена отрицателна обратна връзка,
С неединична обратна връзка.
Ако скоростта на входния сигнал е максимална и ускорението намалява, тогава контролната точка ще се движи по права линия с наклон от -20 dB/dec в честотния диапазон. Ако ускорението е равно на максималната стойност и скоростта намалява, тогава контролната точка се движи по права линия с наклон от -40dB/dec в честотния диапазон.
Зоната под контролната точка B и две прави линии с наклони от -20dB/dek и -40dB/dek е забранената зона за системата за проследяване LAFC. Тъй като точната LAFR е под пресечната точка на двете асимптоти с 3 dB, желаната характеристика при трябва да се повиши с това количество, т.е.
В този случай необходимата стойност на коефициента на качество по отношение на скоростта и честотата в точката на пресичане на втората асимптота с честотната ос (фиг. 2)
В случай, че управляващото действие се характеризира само с максимална скорост, коефициентът на качество на системата по отношение на скоростта при дадена стойност на грешката:
Ако са посочени само максималното ускорение на сигнала и стойността на грешката, тогава качественият фактор на ускорението е:

Фиг.2.
- Нека максималната статична грешка е дадена за канала за управление (входното действие е стъпаловидно, системата е статична за канала за управление).

Фиг.3.
След това стойността се определя от израза. Статичната точност на автоматична система може да се определи от уравнението:
където е статичната точност на затворената система,
отклонение на контролираната стойност в отворена система,
коефициент на пренос в отворена верига, необходим за осигуряване на определената точност.
- Нека е дадена максимално допустимата статична грешка по канала на смущението (смущаващото действие е стъпаловидно, системата е статична по канала на смущението, фиг. 3).
Тогава стойността се определя от израза:
където е коефициентът на пренос на отворена система по канала на смущението,
където системна грешка без регулатор.
В статични системи за управление грешката в стационарно състояние, причинена от постоянно смущаващо действие, намалява с 1+ в сравнение със система с отворена верига. В този случай коефициентът на пренос на затворената система също намалява с 1+ пъти.
- Нека е дадена допустимата грешка на скоростта от управляващото въздействие (входното действие се променя с постоянна скорост, системата е астатична от първи ред).
Системите за проследяване обикновено са проектирани като астатични от първи ред. Те работят с променливо управляващо действие. За такива системи в стационарно състояние най-характерно е изменението на входното въздействие по линеен закон.
Тогава качественият фактор на системата по отношение на скоростта се определя от израза:
Тъй като грешката в стационарно състояние се определя от нискочестотната част на LFR, нискочестотната асимптота на желания LFR може да бъде конструирана от изчислената стойност на коефициента на пренос.
3. Изчисляване на стационарния режим на работа на системата за автоматично управление за дадена максимално допустима грешка на система с неединична обратна връзка
Нека априорната информация за входния сигнал бъде сведена до минимум:
- Максималната модулна стойност на първата производна на входното действие (максимална скорост на проследяване);
- Максималната модулна стойност на втората производна на входното действие (максимално проследяващо ускорение);
- Входното действие може да бъде детерминистичен или случаен сигнал с произволна спектрална плътност.
Необходимо е да се ограничи максимално допустимата грешка на системата за управление при възпроизвеждане на полезен сигнал в стационарно състояние на работа със стойността.
Изискването за точност на възпроизвеждане е най-просто формулирано за хармоничен вход, еквивалентен на реален входен сигнал:
като приемем, че амплитудата и честотата са дадени, а началната фаза има произволна стойност.
Нека установим връзка между допустимата грешка на възпроизвеждане на входното действие и параметрите на системата и входния сигнал.
Нека блоковата схема на непрекъсната САУ се сведе до вида (фиг. 4).

Фиг.4.
Грешката на изхода на системата във времевата област се дава от:
където е референтната (без грешки) изходна функция.
Може да се покаже, че поради ограничения на скоростта и ускорениетоизходната функция е различна от стъпковата функция.
Нека картографираме последния израз към пространството на трансформациите на Лаплас:
Нека картографираме в пространството на трансформациите на Фурие:
След това в нискочестотната област (, времеви константи на веригата за обратна връзка).
максималната амплитуда на грешката се определя от израза:
В реални системи при ниски честоти, обикновено, тъй като изискването трябва да бъде изпълнено; математически израз за определянесе преобразува при контролната честота () във формата
и за да може изходната функция да бъде възпроизведена с максимална грешка не повече от дадена, LAFC на проектираната система не трябва да преминава под контролната точка с координати и
4. Изчисляване на стационарната работа на статична система за автоматично управление по метода на граничните преходи
Изявление
Нека е дадена обобщената блокова схема на статичната ACS:

където тук полиномите на числителите и знаменателите не съдържат факторстр (безплатните им членове са равни на едно),
коефициент на пренос на регулатора,
коефициентът на предаване на обекта през канала за управление,
коефициент на обратна връзка,
коефициент на пренос на обекта по канала на смущението,
освен това, в първото приближение статичният и динамичният коефициент на прехвърляне на връзките се приемат равни, номиналната стойност на изходната функция по канала за управление съответства на номиналното входно действие и нека стойността на стъпаловидно смущаващо действие и допустимата статика грешка по канала на смущението в % от номиналната стойност на изходната функция.
Тогава коефициентите на пренос на системата по каналите за управление и смущение в стационарно състояние са равни на коефициентите на статичен пренос на затворената система и се определят по формулите:
(1)
Статичните уравнения за каналите за управление и смущение имат вида
(2)
Коефициентите на предаване на регулатора и веригата за обратна връзка се определят от изразите:
(3)
Начини за подобряване на статичната точност на ACS
- Увеличаване на коефициента на предаване на система с отворена верига в статикасистеми.

Където, .
Въпреки това, условията на стабилност се влошават с нарастване, тоест грешките в динамиката се увеличават.
- Въведение в интегралния регулатор.
2.1. Приложение на I-регулатора: .
В този случай системата става астатична по каналите за управление и смущение и статичната грешка става равна на нула. LAFC на системата ще бъде много по-стръмен от оригиналния и фазовото изместване ще се увеличи с 90 градуса. Системата може да е нестабилна.
2.2. Настройка на PI контролера: .
Тук статичната грешка е равна на нула, а условията за стабилност са по-добри, отколкото при система с I-контролер.
2.3. Използване на PID контролера: .
Статичната грешка на системата е нула, а условията за стабилност са по-добри, отколкото в система с PI контролер.
- Въведение в системата за неединична обратна връзка, ако е необходимо точно възпроизвеждане на информационното ниво на входния сигнал.
Предполагаме, че и са статични връзки. , изисква се избор на такъв
Да се; .
- Входно мащабиране
въздействие.
Тук.
Изходната функция ще бъде равна на информационното ниво на входното действие, ако от тук къде.
- Приложение на принципа на компенсация чрез канали за управление и смущение.
Изчисляването на компенсиращите устройства е описано в раздела "Изчисляване на комбинирани системи за управление".
Изчисляване на динамиката на ACS
Синтез на ACS за LFC
В момента са разработени голям брой методи за синтез на коригиращи устройства, които са разделени на:
- методи за аналитичен синтез, които използват аналитични изрази, които свързват индикаторите за качество на системата с параметрите на коригиращите устройства;
- графо-аналитичен.
Най-удобният от методите за графо-аналитичен синтез е класическият универсален метод на логаритмичните честотни характеристики.
Същност на метода е както следва. Първо се изгражда асимптотичният LAFC на оригиналната система, след което се изгражда желаният LAFC на отворената система; LAFC на коригиращото устройство трябва да промени формата на LAFC на оригиналната система, така че LAFC на коригираната система.
Най-трудната и критична стъпка в синтеза е изграждането на желания LFC. При конструирането се приема, че синтезираната система има единична отрицателна обратна връзка и е минималнофазова система. Количествената връзка между показателите за качество на преходната функция на минималнофазовите системи с единична FOS и LAFC на отворена система е установена въз основа на номограмите на Chestnut-Mayer, V. V. Solodovnikov, A. V. Fateev, V. A. Besekersky.
Желаният LACH условно се разделя на три части: нискочестотна, средночестотна и високочестотна. Нискочестотната част се определя от статичната точност на системата, точността на работата на ACS в стационарно състояние. В статична система нискочестотната асимптота е успоредна на честотната ос; в астатичните системи наклонът на нискочестотната асимптота е 20 * dB/dec, където - ред на астатизъм ( =1, 2, 3,...). Средночестотната част е най-важна, тъй като тя определя главно динамиката на процесите в системата. Основните параметри на средночестотната асимптота са нейният наклон и граничната честота. Колкото по-голям е наклонът на средночестотната асимптота, толкова по-трудно е да се осигурят добри динамични свойства на системата. Следователно, наклон от 20 dB/dec е разумен и рядко надвишава 40 dB/dec. Честотата на прекъсване определя скоростта на системата. Колкото повече, толкова по-висока е производителността (колкото по-малко). Високочестотната част на желания LAFC има малък ефект върху динамичните свойства на системата. Най-общо казано, по-добре е да има възможно най-голям наклон на неговата асимптота, което намалява необходимата мощност на изпълнителния механизъм и влиянието на високочестотния шум.
Желаният LACH се изгражда на базата на изискванията към системата: изискванията за статични свойства са дадени под формата на реда на астатизма и коефициент на пренос на отворена система; динамичните свойства най-често се задават от максимално допустимата стойност на превишаване и време за регулиране; понякога се задава ограничение под формата на максимално допустимото ускорение на контролираната променлива при първоначалното несъответствие.
Методи за конструиране на желания LAF: конструкция според V. V. Solodovnikov, използване на типични LAF и номограми за тях, конструкция според E. A. Sankovsky G. G. Sigalov, опростена конструкция, конструкция според V. A. Besekersky, според метода на A. V. Fateeva и други методи.
Предимства на честотните методи:
● Честотните характеристики, отразяващи математическия модел на даден обект, могат да бъдат сравнително лесно получени експериментално;
● Изчисленията на АЧХ са сведени до прости и визуални графично-аналитични конструкции;
● Честотните методи съчетават простота и яснота при решаване на проблеми, независимо от реда на системата, наличието на трансцендентални или ирационални връзки на предавателната функция.
Синтез на желания LACH
Теоретични и експериментални изследвания са установили, че LAFC на система за управление с отворена верига, която е стабилна в затворено състояние, почти винаги пресича честотната ос с участък с наклон от 20 dB/dec. Пресичането на честотната ос от LAFC секция с наклон от 40 dB/dec или 60 dB/dec е възможно, но рядко се използва, тъй като такава система е стабилна при много нисък коефициент на предаване.
Най-рационалната форма на LAFC на отворена система, стабилна в затворено състояние, има наклони:
- нискочестотна асимптота 0, -20, -40 dB/dec (определена от реда на астатизма на системата);
- асимптотата, свързваща нискочестотните със средночестотните асимптоти, може да има наклони от 20, -40, -60 dB/dec;
- средночестотна асимптота 20 dB/ дек;
- асимптотата, свързваща средночестотната с високочестотната част на LAFC, като правило има наклон от -40 dB/dec;
- високочестотната секция на LAFC е изградена успоредно на асимптотите на високочестотната секция на LAFC на оригиналната система с отворена верига.
При конструирането на желания LFC се вземат предвид следните изисквания:
- Коригираната система трябва да отговаря на зададените показатели за качество (допустима грешка в стационарно състояние, необходимия запас на устойчивост, скорост, превишаване и други показатели за качеството на преходните процеси).
- Формата на желания LFC трябва да се различава възможно най-малко от LFC на некоригираната система, за да се опрости стабилизиращото устройство.
- Трябва да се стремим да гарантираме, че при високи честоти не преминава над LAFC на некоригираната система с повече от 20-25 dB.
- Нискочестотната част на желаната LAFC трябва да съответства на LAFC на некоригираната система, тъй като коефициентът на предаване на отворена верига, динамично некоригирана система е избран, като се вземе предвид изискваната точност в стационарно състояние.
Изграждането на желания LFC може да се счита за завършено, ако са изпълнени всички изисквания за качество на системата. В противен случай трябва да се върнете към изчисляването на работата в стационарно състояние и да промените параметрите на елементите на главната верига (изберете двигател с различна мощност или по-малка инерция, използвайте усилвател с по-кратка времеконстанта, включете твърда отрицателна обратна връзка обхващащи най-инерционните елементи на системата и др.) .
Алгоритъм за конструиране на желания LFC

- Избор на гранична честота L f (w).
Ако е дадено превишаване и време на затихване на преходния процес, тогава се използват номограмите на V. V. Solodovnikov или A. V. Fateev; ако е зададен индексът на трептене M, тогава изчислението се извършва по метода на V.A. Besekersky.
В. В. Солодовников основава изграждането на качествени номограми на типична реална честотна характеристика на затворена ACS (фиг. 2). За статични системи ( =0), за астатични системи ( =1, 2,…) .
Този метод предполага, че съотношението е спазено.
За изходни се приемат динамичните качествени показатели и , които се свързват с параметрите на реалната честотна характеристика на затворената ACS чрез качествената диаграма V.V. Солодовников (фиг. 3). Според стойността, определена с помощта на кривата (фиг. 3), се определя съответната стойност. След това според кривата се определя стойността, която е равна на зададената стойност, получаваме, където е стойността на граничната честота, при която контролното време не надвишава зададената стойност.
От друга страна, тя е ограничена от допустимото ускорение на контролираната координата. Препоръчва се къде е първоначалното несъответствие.
Контролното време може да се определи приблизително с помощта на емпирична формула, където коефициентът на числителя се приема равен на 2 at, 3 at, 4 at.
Винаги е желателно системата да се проектира възможно най-бързо.
По правило не надвишава повече от ½ десетилетие. Това се дължи на усложняването на коригиращите устройства, необходимостта от въвеждане на диференциращи връзки в системата, което намалява надеждността и устойчивостта на шум, както и поради ограничението на максимално допустимото ускорение на регулируемата координата.
Честотата на прекъсване може да се увеличи само чрез нейното увеличаване. В този случай статичната точност се увеличава, но условията на стабилност се влошават.
Решението за избор трябва да има достатъчна обосновка.
- Ние конструираме средночестотната асимптота.
- Ние свързваме средночестотната асимптота с нискочестотната асимптотатака че в честотния диапазон, в който да има излишък на фаза. Фазовият ексцес и модулният ексцес се определят от номограмата (фиг. 4). Конюгираната асимптота има наклон от 20, -40 или 60 dB/dec при =0 ( - редът на астатизъм на системата); -40, -60 dB/dec при =1 и -60 dB/dec при =2.
Ако фазовият излишък се окаже по-малък, тогава конюгиращата асимптота трябва да се измести наляво или нейният наклон трябва да се намали. Ако фазовият излишък е по-голям от допустимата стойност, тогава конюгиращата асимптота се измества надясно или нейният наклон се увеличава.
Първоначалната ъглова честота се определя от израза.
- Ние свързваме средночестотната асимптота с високочестотната часттака че в честотния диапазон, където има излишък на фазата. Ъгловата честота се определя от съотношението.
Ако на ъгловата честота<, то сопрягающую асимптоту смещают вправо или уменьшают ее наклон.
Ако >, тогава конюгиращата асимптота се измества наляво или нейният наклон се увеличава. Препоръчителната разлика трябва да бъде няколко градуса. Честотата на десния ъгъл на ъгловата асимптота.
По правило наклонът на тази асимптота е -40 dB/dec, а допустимата разлика. Тестът се извършва с честотата, при която.
- Високочестотната част е проектирана паралелно или в комбинация с нея.
Тази част от характеристиката влияе върху гладкостта на системата.
И така, на първия етап от конструирането честотите, при които средночестотната асимптота се конюгира с конюгиращите асимптоти, се намират от условията. На втория етап стойностите на конюгиращите честоти се прецизират, като се вземат предвид фазовите излишъци. На третия етап всички ъглови честоти се коригират според условието на тяхната близост до ъгловата честота на оригиналната система, т.е. ако тези честоти се различават незначително една от друга.
Синтез на последователна коригираща верига
В схемата на фиг. 1 параметрите на коригиращата верига могат да бъдат получени от тук:
Нека да преминем към логаритмични честотни характеристики: ,
При високи честоти LAFC на регулатора "по подразбиране" не трябва да надвишава 20 dB според условието за защита от шум. Основният принцип на структурно-параметричната оптимизация на ACS с обратна връзка: контролерът трябва да съдържа динамична връзка с предавателна функция, равна или близка до обратната предавателна функция на обекта за управление.
Нека разгледаме изчислението на последователна коригираща верига като пример.
Нека се изисква коригиране на статичната система. Да приемем, че сме построили. Считаме, че системата е с минимално-фазови връзки, поради което не изграждаме фазово-честотната характеристика (фиг. 2).
Сега е лесно да се възпроизведат параметрите на коригиращата верига. Най-често използваните активни коригиращи устройства и пасивни RC - вериги. Въз основа на физически концепции, ние изграждаме веригата, показана на фиг. 3.
Затихване на сигнала от делителя R1-R 2 при високи честоти съответства на затихване на сигнала * от.
Където,
При високи честоти не внася изкривяване като положителен фактор. Ние можем да изместим граничната честота наляво с помощта на коригираща схема и да осигурим необходимата стабилност и качество на системата.
Предимства на последователния KU:
- Простотата на коригиращото устройство (в много случаи реализирано под формата на обикновени пасивни RC-контури);
- Лесно включване.
недостатъци:
- Ефектът от последователната корекция намалява по време на работа, когато параметрите (коефициенти на усилване, времеви константи) се променят, следователно при последователна корекция се налагат повишени изисквания към стабилността на параметрите на елементите, което се постига чрез използване на по-скъпи елементи;
- Напредване на фазата на диференциране RC - схемите (алгоритмите в микроконтролерите) са чувствителни към високочестотен шум;
- Последователни интегратори RC -веригите съдържат по-обемисти кондензатори (изисква внедряване на големи времеконстанти), отколкото веригите във веригата за обратна връзка.
Обикновено се използват в системи с ниска мощност. Това се обяснява, от една страна, с простотата на серийните коригиращи устройства и, от друга страна, с нецелесъобразността на използването в тези системи на обемисти паралелни коригиращи устройства, съизмерими с размера на изпълнителния двигател, като тахогенератор.
Трябва да се има предвид, че поради насищането на усилвателите не винаги е препоръчително да се формира желаният LAFC в ниско- и средночестотния диапазон поради последователното включване на интегриращи и интегро-диференциращи вериги или някои други елементи с подобни характеристики в системата. Следователно обратната връзка често се използва за оформяне в ниско- и средночестотния диапазон.
Синтез на противопаралелни коригиращи вериги
При избора на място за включване на коригиращата верига трябва да се спазват следните правила:
- Тези връзки трябва да бъдат обхванати, които значително влияят отрицателно върху вида на желания LACH.
- Наклонът на LAFC на връзките, които не са обхванати от обратната връзка, се избира близо до наклона в средночестотния диапазон. Изпълнението на това условие ни позволява да имаме проста коригираща верига.
- Коригиращата обратна връзка трябва да обхваща възможно най-много връзки с нелинейни характеристики. В крайна сметка е необходимо да се стремим да гарантираме, че сред връзките, които не са обхванати от обратна връзка, няма елементи с нелинейни характеристики. Такова включване на обратна връзка позволява значително да се намали влиянието на нелинейността на характеристиките на елементите, обхванати от обратната връзка, върху работата на системата.
- Обратната връзка трябва да обхваща връзки с голям трансферен коефициент. Само в този случай действието за обратна връзка ще бъде ефективно.
- Сигналът към входа за обратна връзка трябва да бъде взет от елемент с достатъчна мощност, за да не го натоварва включването на обратна връзка. Сигналът от изхода за обратна връзка по правило трябва да се подава към входа на елементи на системата с голям входен импеданс.
- Когато избирате къде да включите обратната връзка в рамките на коригираща обратна връзка, желателно е наклонът на LAFC в честотния диапазон да е 0 или 20 dB/dec. Изпълнението на това условие ни позволява да имаме проста коригираща верига.
Често те покриват усилващия път на системата или покриват силовата част на системата. Коригиращите обратни връзки обикновено се използват в мощни системи.
Предимства на CEP:
- Зависимостта на показателите за качество на системата от промените в параметрите на елементите на неизменната част от системата намалява, тъй като в значителен честотен диапазон предавателната функция на участъка на системата, обхванат от обратна връзка, се определя от реципрочната на предавателната функция на антипаралелно коригиращо устройство. Следователно изискванията към елементите на оригиналната система са по-малко строги, отколкото при последователната корекция.
- Нелинейните характеристики на елементите, обхванати от обратната връзка, са линеаризирани, тъй като свойствата на предаване на покрития участък на системата се определят от параметрите на контура във веригата за обратна връзка.
- Захранването на коригиращи устройства back-to-back, дори когато изисква висока мощност, не създава затруднения, тъй като обратната връзка обикновено започва от крайните връзки на системата с мощен изход.
- Антипаралелните коригиращи устройства работят при по-ниско ниво на смущения от серийните, тъй като сигналът, който влиза в тях, преминава през цялата система, която е нискочестотен филтър. Поради това ефективността на противопаралелните коригиращи устройства, когато се приложи смущение към сигнала за грешка, намалява по-малко от серийните коригиращи устройства.
- За разлика от последователно коригиращо устройство, обратната връзка прави възможно реализирането на най-голямата времева константа на желания LAFC с относително малки стойности на собствените времеви константи.
недостатъци:
- Гръб-към-гръб KU често съдържат скъпи или обемисти елементи (например тахогенератори, диференциращи трансформатори).
- Сумирането на сигнала за обратна връзка и сигнала за грешка трябва да се реализира по такъв начин, че обратната връзка да не шунтира входа на усилвателя.
- Веригата, образувана от коригиращата обратна връзка, може да е нестабилна. Намаляването на границите на стабилност във вътрешните вериги влошава надеждността на системата като цяло.
Методи за определяне:
- аналитичен;
- Граф-аналитичен;
- Моделно-експериментален.
След изчисляване на антипаралелната коригираща верига трябва да се провери стабилността на вътрешната верига. Ако основната обратна връзка е отворена и вътрешната верига е нестабилна, тогава елементите на системата може да се провалят. Ако вътрешната верига е нестабилна, нейната стабилност се осигурява от последователна коригираща верига.
Приблизителен метод за конструиране на LFC на коригираща отрицателна обратна връзка
Нека блоковата схема на проектираното
Системата се привежда в показания вид
На фиг.1.
коригираща обратна връзка;
предаване
референтна функция с отворен цикъл (некоригирана)
системи.
За такава блокова диаграма, предавателната функция на коригираната отворена система.
В честотния диапазон, къдетоуравнението ще бъде написано така
Тези.
Условие за избор; (1)
- уравнение за избор (в ниските и високите честотни диапазони) (2)
В честотния диапазон, където
Условие за избор; (3)
получаваме
т.е.
където - уравнение за избор(в средночестотния диапазон). (4)
Тогава алгоритъмът за изграждане е както следва:
- Ние строим.
- Ние строим.
- Изграждаме и определяме честотния диапазон, където тази характеристика е по-голяма от нула (условие за избор (3)).
- Въз основа на конкретното техническо изпълнение на системата се определя, т.е. входни и изходни точки за коригираща обратна връзка.
- Ние строим.
- В избрания честотен диапазон изграждаме логаритмичната честотна характеристика на коригиращия елемент, изваждайки от според уравнението за избор (4).
- В областта с ниска честота, където (условие за избор (1)), избираме така, че уравнението за избор (2) да е изпълнено: .
- Във високочестотната област неравенство (2) обикновено е изпълнено при наклон на асимптотата от 0 dB/dec.
- Наклонът и дължината на конюгиращите асимптоти се избират въз основа на простотата на схемното изпълнение на коригиращото устройство.
- Според LAFC ние определяме и проектираме схематична диаграма на коригиращата връзка.
Пример. Нека и да бъде дадено. Връзките, обхванати от обратната връзка, са определени. Изисква се за изграждане. Конструкцията е направена на фиг.2. Първоначалната система е минималнофазова. След изграждането изчисленият контур трябва да се провери за стабилност.
Точен метод за конструиране на LFC на коригираща обратна връзка
Ако се изисква стриктно да се поддържат посочените показатели за качество, тогава е необходимо да се изчислят точните стойности на честотните характеристики на коригиращата верига.
Оригиналната блокова схема на некоригирания ACS
Трансформирана блокова схема
Коригирана еквивалентна блокова диаграма на ACS

Нека въведем обозначението: , (1)
Тогава.
Това ни позволява да използваме номограми на затваряне и намиране и.
Да приемем, че и са известни. Използваме номограмата на затварянето в обратен ред:
, => , .
Тогава от израза
LFC на антипаралелна коригираща верига:
За да изберете параметрите на коригиращата верига, е необходимо да представите LAFC в асимптотична форма.
Изграждане на LFC на пряка паралелна коригираща връзка
Блоковата схема на проектираната система е трансформирана във вида на фиг.1.
В този случай е препоръчително да се вземе предвид функцията за предаване.
Честотните характеристики и се определят подобно на честотните характеристики на последователна коригираща верига.
В честотния диапазон където характеристиките
тези. коригиращата верига не влияе на работата на системата, но в честотния диапазон, където, характеристиките
а поведението на системата се определя от параметрите на пряката паралелна верига.
В честотния диапазон, където, е препоръчително при определяне на LFC и паралелно свързаните връзки да се представят във формата, където, .
LFC на последователното коригиращо устройство и изграждане, както преди. Използвайки номограмата на затварянето, намираме и и накрая, .
Проектиране на коригиращо устройство
CU критерии за качество:
- Надеждност;
- Ниска цена;
- Простота на изпълнение на веригата;
- устойчивост;
- шумоустойчивост;
- Ниска консумация на енергия;
- Лекота на производство и работа.
Ограничения:
- Не се препоръчва да се инсталират кондензатори или резистори в една коригираща връзка, чиито стойности се различават с два или три порядъка.
- LAFC на коригиращите връзки може да има разширение на честотата не повече от 2-3 десетилетия, затихване на амплитудата не повече от 20-30 dB.
- Коефициентът на предаване на пасивна мрежа с четири терминала не трябва да бъде проектиран по-малък от 0,05-0,1.
- Оценки на резистори в активни коригиращи връзки:
а) във веригата за обратна връзка не повече от 1-1,5 MΩ и не по-малко от десетки kΩ;
б) във веригата на директния канал от десетки kΩ до 1 MΩ.
- Номинални стойности на кондензатора: единици микрофаради стотици pFarads.
Видове коригиращи връзки
- Пасивни четириполюсници ( R - L - C -вериги).
Ако, тогава влиянието на натоварването върху информационните процеси може да бъде пренебрегнато. .
Изходният сигнал в тези схеми е по-слаб (или равен по ниво) на входа.
Пример. Пасивна интегро-диференцираща връзка.
Където.
Преобладаването на диференциращия ефект се осигурява, ако количеството на затихванек<0.5 или иначе.
Тъй като съпротивлението е най-голямо, препоръчително е да започнете изчисляването на елементите на коригиращата верига от условието, настройката.

Да обозначим къде;
дефинирайте междинен параметър =>
следователно k = D .
Входен импеданс на DC връзката,
на променлив ток
При съгласуване по съпротивления достатъчно условие за постоянен ток е изпълнението на отношението,
на променлив ток.
- Активни четириполюсници.
Ако коефициентът на предаване на усилвателя >>1.
Пример . Активна реална разграничителна връзка от първи ред.
Освен това, .
се избира по време на пускане в експлоатация (нулева настройка на усилвателя).
при променлив ток и при постоянен ток входният импеданс е еднакъв.
Изходното съпротивление на операционните усилватели е десетки ома и се определя главно от стойностите на резисторите в колекторните вериги на изходните транзистори.
Схемата осигурява напредък не в целия честотен диапазон, а само в определена лента близо до граничната честота на системата, която обикновено се намира в диапазона на ниските и средните честоти на оригиналния ACS. Идеалната връзка подчертава силно високите честоти, в чиято област се намира спектърът на смущенията, насложен върху полезния сигнал, докато реалната верига ги предава без значително усилване.
- Диференциращ трансформатор.

Съпротивлението на веригата на първичната намотка на трансформатора.
коефициент на трансформация на трансформатора.
Предавателна функция на стабилизиращия трансформатор при
изглежда като
Където, индуктивност на трансформатора в режим на празен ход; .
- Пасивен променлив ток с четири извода.
В променливотокови вериги могат да се използват вериги за корекция на постоянен ток.
Схемата за включване на коригиращите вериги е следната:
Координиране на елементарни коригиращи връзки
Произведено:
- Според натоварванията на активните връзки (токовете на натоварване на усилвателите не трябва да надвишават максимално допустимите стойности);
- Чрез съпротивителен изходен вход (при постоянен ток и горната честота на работния диапазон на системата).
Стойностите на натоварване на операционния усилвател са посочени в спецификациите за тяхното приложение и обикновено са повече от 1 kΩ.

Забележка. Знак<< означает меньше как минимум в 10 раз.
Изисквания към операционните усилватели:
- Усилване на напрежението.
- Малък дрейф на нулата.
- Голям входен импеданс (100 kΩ 3MΩ).
- Ниско изходно съпротивление (десетки ома).
- Честотен диапазон на работа (честотна лента).
- Захранващо напрежение +5V, но не по-малко от 10V.
- Дизайн (брой усилватели в един корпус).
Типични регулатори
Видове регулатори:
- P-регулатор (гр.състояние стоящ; статичният регулатор формира закон за пропорционално регулиране);
С увеличаване на k p стационарната грешка намалява, но се увеличава шумът от измерването, което води до увеличаване на активността на задвижващите елементи (те работят рязко), механичната част се износва и експлоатационният живот на оборудването значително намалява.
недостатъци:
● неизбежно отклонение на контролираната стойност от зададената, ако обектът е статичен;
● забавено реагиране на регулатора на смущаващи въздействия в началото на преходния процес.
- I-регулатор (интегрален);
- PD контролер (пропорционално-диференциален);
- ПИ контролер (пропорционално-интегрален);
- ПИД регулатор (пропорционално-интегрално-диференциален);
- Реле контролер.
Регулаторът от тип D се използва в обратната връзка, а DI не се използва.
Тези регулатори в много случаи могат да осигурятприемливо управление, лесен за настройка и евтин в масово производство.
PD контролер
Структурна схема:

принуждаваща връзка.
реална предавателна функция на PD контролера.
закон за регулиране.

(1) без регулатор;
(2) P-регулатор;
(3) PD контролер.
Предимства на PD контролера:
- Маржът на стабилност се увеличава;
- Значително подобрено качество
регулиране (намалява флуктуацията
И времето на прехода
процес).
Недостатъци на PD контролера:
- Ниска точност на управление (статична работа
оригиналната система не се променя, когато k p \u003d 1);
- Смущенията при високи честоти се усилват и
нарушаване на системата поради насищане
усилватели;
- Трудно приложимо на практика.
Внедряване на PD контролер
Входните и обратните сигнали се сумират просто.
Ако промените знаците на входното действие и обратната връзка, тогава към изхода на контролера трябва да се свърже инвертор.
Ценеровите диоди в обратната връзка на операционния усилвател са проектирани да ограничават нивото на изходния сигнал до предварително определена стойност.
Във входните вериги и се включват при необходимост. Желателно е да. Ако се изключи, тогава усилвателят може да влезе в режим на насищане поради смущения. Избрано (стойност до 20 kOhm).
Функцията за предаване на контролера през контролния канал:
PI контролер
(Гръцки isos даже, dromos бягане; изодромен регулатор)


При ниски честоти преобладава интегриращият ефект (няма статична грешка), а при високи честоти ефектът от (качеството на преходния процес е по-добро, отколкото при I-закона за регулиране).
закон за регулиране.
- липса на регулатор;
- Р-регулатор;
- PI контролер.
Предимства:
- Лекота на изпълнение;
- Значително подобрява точността на регулиране в статиката:
Стационарната грешка при постоянно входно действие е равна на нула;
Тази грешка не е чувствителна към промените в параметрите на обекта.
недостатъци : астатизмът на системата се увеличава с единица и в резултат на това границата на стабилност намалява, колебателният процес на преходния процес се увеличава, увеличава се.
Внедряване на PI контролера
ПИД контролер
При ниските честоти преобладава интегриращият ефект, а при високите - диференциращият.
закон за регулиране.
Когато инсталирате PID регулатора, статичната система става астатична (статичната грешка е нула), но в динамиката астатизмът се премахва поради действието на диференциращия компонент, т.е. качеството на преходния процес се подобрява.
Предимства:
- Висока статична точност;
- Висока производителност;
- Голям запас от стабилност.
недостатъци:
- Приложимо за описаните системи
диференциални уравнения на ниско
ред, когато един обект има един или два полюса
или може да се апроксимира по модела на втория
поръчка.
- Изискванията към качеството на управление са средни.
Реализация на PID контролер

къде и.
Според LAFC на операционния усилвател определяме. Тогава предавателната функция на реалния контролер има формата
В системите най-често се използва PID регулаторът.
- За обекти със закъснение, чиято инерционна част е близо до връзката от първи ред, е препоръчително да се използва PI контролер;
- За обекти със закъснение, чиято инерционна част има ред, най-добрият регулатор е PID регулаторът;
- PID регулаторите са ефективни по отношение на намаляването на грешката в стационарно състояние и подобряването на типа преходен отговор, когато контролният обект има един или два полюса (или може да бъде апроксимиран чрез модел от втори ред);
- Когато процесът на управление се характеризира с висока динамика, като например в система за управление на дебит или налягане, диференциращият компонент не се използва, за да се избегне явлението самовъзбуждане.
Изчисляване на комбинирани системи за управление
Комбинирантакова управление в автоматична система, когато заедно със затворен контролен контур чрез отклонение се използва външно компенсиращо устройство за настройка или смущаващи влияния.
Принцип на инвариантносттапринципът на компенсиране на динамични и статични грешки, независимо от формата на входното действие през канала за управление или компенсиране на смущаващото действие.
инвариантен по отношение на
смущаващо влияние, ако след завършване на преходния процес,
определени от началните условия, контролираната стойност и системната грешка не са
зависят от този ефект.
Автоматичната система за управление еинвариантен по отношение на
майсторско влияние, ако след завършване на преходния процес, определен от
начални условия, грешката на системата не зависи от това влияние.
- Изчисляване на компенсаторни устройства според канала на смущения
Нека блоковата диаграма на оригиналната система се трансформира до показаната форма
на фиг.1.
Нека пренесем точката на приложение на смущението на входа на системата (фиг. 2).

Нека напишем уравнението за изходната координата: .
Влияние на изходната функция от смущението f ще отсъства, ако условието е изпълненоабсолютна инвариантностсистеми до смущаващи ефекти:
Условието за пълна компенсация на смущението.
Външни контролери се използват за получаване на инвариантност върху канала на смущението с точност до , тъй като редът на знаменателя обикновено е по-висок от реда на числителя.
Пример . Нека обектът и контролерът се държат като апериодични връзки. Най-голямата времева константа, като правило, принадлежи на обекта.
Тогава
Графиките на фиг. 3.
Компенсиращата верига трябва да има диференциращи свойства и активни диференциращи свойства при високи честоти (тъй като характеристиката е частично разположена над честотната ос).
Постигането на абсолютна инвариантност е невъзможно, но компенсационният ефект може да бъде значителен дори с проста компенсираща схема, която осигурява изпълнение в ограничен честотен диапазон (на фиг. 3).
Технически е трудно и не винаги е възможно да се измери смущението, поради което при проектирането на системи често се използват косвени методи за измерване на смущенията.
2. Изчисляване на системи с компенсиране на грешката по канала за управление
За тази система, чиято блокова схема е показана на фиг. 4 важат следните съотношения:
трансферна функция по погрешка.
Можем да постигнем условието за пълна компенсация на грешката, ако изберем компенсираща верига със следните параметри:
(1) условието за абсолютна инвариантност на системата към грешка в канала за управление.
Системите за проследяване са изпълнени като астатични. Помислете за пример за такива системи (фиг. 5).
Във високочестотната област диференциацията от втори ред в компенсиращата верига води до насищане на усилвателите при високо ниво на шум. Следователно се извършва приблизително изпълнение, което дава осезаем ефект от регулирането.
Астатичните системи се характеризират с коефициент на пренос на качествен факторк определен при =1 и = k .
Ако к =10, тогава грешката е 10%, тъй като
Система с ниско качество (Фигура 6).
Въвеждаме компенсираща верига с предавателната функция
Тахогенераторът може да служи като такава верига, ако
Механичен вход. Внедряване на система с ниско качество
просто.
Нека от условие (1) получаваме.
Тогава, имайки система с астатизъм от 1-ви ред, получаваме система с
астатизъм от втори ред (фиг. 7).
Винаги Y изостава от контролния сигнал; чрез въвеждане, ние намаляваме грешката. Компенсиращата верига не влияе на стабилността.
По правило компенсиращата връзка трябва да има диференциращи свойства и да се реализира с помощта на активни елементи. Точното изпълнение на условието за абсолютна инвариантност е невъзможно поради техническата нецелесъобразност за получаване на производна по-висока от втория ред (високо ниво на шум се въвежда в управляващия контур, сложността на компенсиращото устройство се увеличава) и инерцията на реални технически средства. Броят на апериодичните връзки в компенсиращото устройство е проектиран равен на броя на елементарните усилващи връзки. Времеконстантите на апериодичните връзки се изчисляват според състоянието на работата на връзките в значителен честотен диапазон, т.е.
Нарича се принципът на изграждане на многоконтурна система за автоматично управление с каскадно свързване на регулаторипринципът на подчиненото регулиране.
Синтезът на ACS на подчинено управление с два или повече контура се осъществява чрез последователна оптимизация на контурите, като се започне от вътрешния.
∆θ
,
градушка
∆L,
dB
w и (p)
W A1 (p)
1/T p
1/T 0
Други свързани произведения, които може да ви заинтересуват.vshm> |
|||
| 2007. | Динамичен режим на системи за автоматично управление | 100,64 КБ | |
| Динамичен режим на ACS. Уравнение на динамиката Стабилният режим не е типичен за ACS. По този начин основният режим на работа на ACS се счита за динамичен режим, характеризиращ се с възникването на преходни процеси в него. Следователно втората основна задача при разработването на СКУД е анализът на динамичните режими на работа на СКУД. | |||
| 12933. | СИНТЕЗ НА ДИСКРЕТНИ СИСТЕМИ ЗА УПРАВЛЕНИЕ | 221.91KB | |
| Задачата за синтезиране на цифрови управляващи устройства В случаите, когато затворена дискретна система, съставена от функционално необходими елементи, е нестабилна или нейните показатели за качество не отговарят на изискваните, възниква проблемът за нейната корекция или задачата за синтезиране на управляващо устройство. Понастоящем най-рационалният начин за изграждане на управляващи устройства е използването на управляващи компютри или специализирани цифрови компютри TsV ... | |||
| 2741. | СИНТЕЗ НА СИСТЕМИ ЗА УПРАВЛЕНИЕ С ОБРАТНА ВРЪЗКА | 407.23KB | |
| Нека изградим преходните и честотните характеристики на непрекъснатите и дискретните модели: Преходна реакция на непрекъсната система. Преходна реакция на дискретна система. Честотни характеристики на непрекъсната система. | |||
| 3208. | Основи на анализа и изграждането на системи за автоматично управление | 458,63 КБ | |
| За даден динамичен обект разработете самостоятелно или вземете от литературата схема на система за автоматично управление, работеща на принципа на отклонението. Разработване на вариант на комбинирана система, която включва управляващи контури за отклонение и смущение. | |||
| 5910. | Системи за автоматично управление с цифров компютър | 928.83KB | |
| През последните две десетилетия надеждността и цената на цифровите компютри се увеличиха значително. В тази връзка те все повече се използват в системите за управление като регулатори. За време, равно на периода на квантуване, компютърът е в състояние да извърши голям брой изчисления и да генерира изходен сигнал, който след това се използва за управление на обекта | |||
| 5106. | Основните видове изследване на системите за управление: маркетинг, социология, икономика (техните характеристики). Основни насоки за усъвършенстване на системите за управление | 178,73 КБ | |
| В контекста на динамиката на съвременната производствена и социална структура управлението трябва да бъде в състояние на непрекъснато развитие, което днес не може да бъде постигнато без изследване на пътищата и възможностите за това развитие. | |||
| 14277. | Въведение в анализа, синтеза и моделирането на системи | 582.75KB | |
| Строго погледнато, има три клона на науката, изучаващи системата: системология, теория на системата, която изучава теоретични аспекти и използва теоретични методи, теория на информацията, теория на вероятностите, теория на игрите и др. Организацията на една система се свързва с наличието на някои причинно-следствени връзки в тази система. Организацията на системата може да има различни форми, например биологична информация, екологична, икономическа, социална, времева и пространствена, и се определя от причинно-следствените връзки в материята и обществото. В... | |||
| 5435. | Подобряване на системата за автоматично управление на процеса на уплътняване на утайката | 515,4 КБ | |
| Гранулатът на Уралкалий се изнася основно за Бразилия, САЩ и Китай, където се използва допълнително или за директно внасяне в почвата, или смесен с азотни и фосфорни торове. | |||
| 20340. | АНАЛИЗ И СИНТЕЗ НА СИСТЕМАТА ЗА УПРАВЛЕНИЕ В ПРЕДПРИЯТИЕТО | 338,39 КБ | |
| Усъвършенстването на системата за управление, както и днешната управленска практика в съвременните условия, показват остър проблем за необходимостта от изследователски подход както към управлението на предприятието, така и към неговото усъвършенстване и развитие. | |||
| 1891. | Синтез на дискретен модален закон за управление по метода на Л.М. Бойчук | 345.04KB | |
| Въз основа на функцията W(z) съставете описание на дискретен обект в пространството на състоянията. Проверете изпълнението на условията за контролируемост и наблюдаемост на този обект. | |||
Методът LFC е един от най-разпространените методи за синтез на автоматично управление, тъй като конструкцията на LFC, като правило, може да се извърши с малко или никаква изчислителна работа. Особено удобно е да се използва асимптотичният "идеален" LACH.
Процесът на синтез обикновено включва следните операции;
1. Изграждане на ЛАЧК на неизменната част от системата.
Неизменната част на системата за управление съдържа обекта за управление и изпълнителния елемент, както и основния елемент за обратна връзка и елемента за сравнение.
2. Изграждане на желаната част от ЛАЧ.
Графикът на желания LACH се изготвя на базата на изискванията, които се прилагат към проектираната система за управление. Желаният LAFC Lzh може условно да се раздели на три части: нискочестотна, средночестотна и високочестотна.
2.1 Нискочестотната част се определя от статичната точност на системата, точността в стационарни условия. В статична система нискочестотната асимптота е успоредна на оста x. В астатична система наклонът на тази асимптота е –20mdB/dec, където е редът на астатизма (=1,2). Ординатата на нискочестотната част Lzh се определя от стойността на коефициента на предаване K на отворената система. Колкото по-широка е нискочестотната част Lzh, толкова повече високи честоти се възпроизвеждат от системата без затворено затихване.
2.2 Средночестотната част е най-важната, тъй като определя стабилността, границата на стабилност и следователно качеството на преходните процеси, обикновено оценявани чрез показатели за качеството на преходния отговор. Основните параметри на средночестотната асимптота са нейният наклон и граничната честота cp (честотата, при която Lzh пресича оста x). Колкото по-голям е наклонът на средночестотната асимптота, толкова по-трудно е да се осигурят добри динамични свойства на системата. Следователно, наклонът от -20dB/dec е най-подходящ и рядко надвишава -40dB/dec.Срезната честота cp определя скоростта на системата и стойността на превишаването. Колкото повече cf, толкова по-висока е скоростта, толкова по-кратко е времето за регулиране Tpp на преходния отговор, толкова по-голямо е превишаването.
2.3 Високочестотната част на LAFC има малък ефект върху динамичните свойства на системата. По-добре е наклонът на неговата асимптота да е възможно най-голям, което намалява необходимата мощност на изпълнителния механизъм и влиянието на високочестотния шум. Понякога при изчисляване на високочестотния LAFC те не вземат предвид.

където е коефициент в зависимост от големината на превишението,
Трябва да се избере според графика, показан на фигура 1.

Фигура 18 - Графика за определяне на допустимия коефициент на превишение.
Ординатата на нискочестотната асимптота се определя съответно от коефициента
коефициент на усилване и наклон на високочестотната асимптота на преходния CAP с отворен контур.
3. Определяне на параметрите на коригиращото устройство.
3.1 Графиката на LAFC на коригиращото устройство се получава чрез изваждане на стойностите на графиката на непроменимия от стойността на графиката на желания LAFC, след което неговата трансферна функция се определя от LAFC на коригиращото устройство.
3.2 Според предавателната функция на регулатора се избира електрическа верига за внедряване на коригиращо устройство и се изчисляват стойностите на нейните параметри. Веригата на регулатора може да бъде на пасивни или активни елементи.
3.3 Трансферната функция на коригиращото устройство, получена в параграф 3.1, е включена в обобщената блокова схема на ACS Използвайки обобщената блокова схема на коригираната ACS, с помощта на компютър се изграждат графики на преходни процеси, които трябва да да не са по-лоши от дадените.
Пример:
6. Синтез на система за автоматично управление по метода на логаритмичните честотни характеристики.
Синтез на линейни САР
Основни понятия за синтеза на системи за управление
Всички математически проблеми, решени в теорията на автоматичното управление, могат да бъдат обединени в два големи класа - задачи за анализ и задачи за синтез на автоматични системи.
В задачите на анализа структурата на системата е напълно известна, всички (като правило) параметри на системата са зададени и е необходимо да се оценят някои от нейните статистически или динамични свойства. Задачите на анализа включват изчисляване на точността в стационарни условия, определяне на стабилността и оценка на качеството на системата.
Проблемите на синтеза могат да се разглеждат като обратни задачи на анализа: те изискват да се определят структурата и параметрите на системата според дадените показатели за качество. Най-простите задачи за синтез са, например, проблемите за определяне на коефициента на предаване на отворена верига от дадена грешка или минималното условие за интегралната оценка.
Синтезът на линейни ACS се разбира като избор на такава блокова схема, нейните параметри, характеристики, които, от една страна, отговарят на дадените показатели за качество и простота на техническо изпълнение и надеждност, от друга страна.
Характеристики на синтеза
ACS включва обект на управление и коригиращи устройства (това са устройства, чиято структура и параметри се променят в съответствие със задачата за синтез).
Задачата на показателите за качество се определя като горната граница на допустимите показатели за качество, т.е. дадените показатели за качество определят областта на вземане на решения. Следователно по време на синтеза се избира критерий за оптимизация, който позволява да се определи недвусмислен избор на структурата и параметрите на ACS.
За съвременните ACS процедурата на синтез определя приблизителните характеристики на ACS, така че крайният резултат се получава в резултат на анализа (настройка, моделиране) на синтезираната ACS.
Етапи на синтез на ACS
Обектът на управление се анализира, определят се статичните и динамичните характеристики на обекта.
Въз основа на зададените качествени показатели на СКУД се определя критерий за оптимизация.
Изгражда се блокова схема на АСУ, избират се техническите средства за нейната реализация.
Синтез на оптимални динамични характеристики.
Приближаване на оптималния динамичен режим, т.е. избор на динамични характеристики (желани), които отговарят на зададените показатели за качество и простота на техническото изпълнение на коригиращите устройства.
Определяне на динамичните характеристики на коригиращи устройства, които осигуряват желаните динамични характеристики на цялата система.
Избор на схема и начин на техническо изпълнение на коригиращи устройства по зададена динамична характеристика на коригиращото устройство.
Анализ на синтезираната ОКС.
Синтез на системи по метода LAFC
Има два начина за активиране на коригиращи устройства:
Последователно към контролния обект.
Тук У 0 (стр) е трансферната функция на обекта и У сърцевина (R)е предавателната функция на коригиращото устройство.
Достойнствоверигата за серийно превключване е простотата на техническото изпълнение.
недостатъци:висока чувствителност на тази верига към смущения; силна зависимост от промените в параметрите на обекта.
Успоредно на някаква част от обекта.
д

недостатъци:коригиращото устройство на тази схема се изпълнява от скъпи схеми, за разлика от веригата (1).
Като динамични характеристики, според които се извършва синтезът на ACS, се избира LAFC на отворената система на обекта, тъй като от него е доста лесно да се определят параметрите на обекта.
Желан LACH
При конструирането на желания LAFC се разграничават три честотни диапазона:
ниски честоти ( с). Този честотен диапазон отразява статичните характеристики.
Среден честотен диапазон ( с). Определя динамичните характеристики на обекта при стъпково въвеждане.
Високочестотен диапазон ( с). Този честотен диапазон не засяга статиката, но определя динамичните характеристики на обекта с бързо променящ се вход.
модален контролер.
Това е метод на коренов синтез, а именно според желаното местоположение на корените на характеристичното уравнение върху комплексната равнина се изгражда модален регулатор, който представя коефициентите на отрицателна обратна връзка за всяка динамична променлива.

Дава се описание на обекта:

Задаваме вида на желания полином D жълто (p) - в съответствие с зададените (желани) качествени показатели.
Нека въведем обратна връзка, като:

Където  - характеристично уравнение на системата с регулатор.
- характеристично уравнение на системата с регулатор.
Пример: Дадена е система от уравнения


n 1 U x 1 x 2 x 3


Трябва да разгледаме контролната матрица:

 Системата е контролируема, тъй като рангът е равен на реда на системата
Системата е контролируема, тъй като рангът е равен на реда на системата
Избираме желания полином със същата степен като системата:
д жълто (p)=(p+w 0 ) 3 =стр 3 +3p 2 w 0 +3pw 0+ w 0 3


 - оценка на качеството, където
- оценка на качеството, където  - време на преходния процес
- време на преходния процес
С избраната стойност  получаваме:
получаваме:
К oc1 = 2; К oc2 = -1; К oc3 =5;
управляемост и видимост.
Системата се нарича управлявана, ако чрез промяна на някой от входните сигнали е възможно да се постигне желаната стойност на изхода на системата за крайно време.

без него системата ще бъде неконтролируема, а с него -
управлявана.
критерий за управляемост.
За да бъде управлявана системата, е необходимо и достатъчно рангът на матрицата на управляемост да е равен на n (порядъкът на обекта).
Като цяло матрицата на контролируемост е правоъгълна. Ако системата има един вход, тогава матрицата има размерност  .
.
Наблюдаемост.
Системата се нарича наблюдаема, ако изходните сигнали Y могат да се използват за възстановяване на променливите на състоянието X.
Наблюдаемостта, за разлика от измеримостта, включва не само измерването на променливите на състоянието X, но и изчисляването на неизмерените променливи X от измерените.
Измеримостта е случаят, когато всяка променлива може да бъде директно измерена.
Критерий за наблюдаемост.
За да бъде системата наблюдаема, е необходимо и достатъчно рангът на матрицата на наблюдаемост да е равен на n (редът на обекта).