sau sentezi için frekans yöntemi. Sau'nun logaritmik frekans özellikleri yöntemiyle sentezi
Ayrıca oku
İyi çalışmalarınızı bilgi bankasına göndermek basittir. Aşağıdaki formu kullanın
Bilgi tabanını çalışmalarında ve işlerinde kullanan öğrenciler, lisansüstü öğrenciler, genç bilim adamları size çok minnettar olacaklar.
Yayınlanan http://www.allbest.ru//
Yayınlanan http://www.allbest.ru//
Rusya Federasyonu Eğitim ve Bilim Bakanlığı
FSBEI HE Ivanovo Devlet Teknik Sibernetik ve Otomasyon Kimyasal Teknoloji Üniversitesi.
DERS ÇALIŞMASI
Disipline göre: Teori otomatik kontrol
Konu: Otomatik kontrol sistemlerinin sentezi
İvanovo 2016
Kontrol nesnesinin geçiş işlevi
Tablo 1. Kontrol nesnesinin geçiş işlevi.
dipnot
Bu kurs çalışmasında, çalışmanın nesnesi, bir geçiş fonksiyonu ve bunun için bir kontrol sistemi ile temsil edilen, gecikmeli durağan bir atalet nesnesidir.
Araştırma yöntemleri, otomatik kontrol, matematiksel ve simülasyon modelleme teorisinin unsurlarıdır.
Tanımlama, tahmin ve grafiksel yöntemler yardımıyla transfer fonksiyonları şeklinde nesne modelleri elde edilmiş, verilen nesneyi en doğru şekilde tanımlayan model kurulmuştur.
Nesne modeli seçildikten sonra, denetleyici ayar parametreleri Ziegler-Nichols ve genişletilmiş frekans yanıt yöntemleri kullanılarak hesaplandı.
Kapalı döngü otomatik kontrol sisteminin denetleyicisi için en iyi ayarların bulunduğu yöntemi belirlemek için simülasyonu gerçekleştirildi. Matlab ortamı Simulink paketini kullanarak. Simülasyonun sonuçlarına göre, verilen kalite kriterini en iyi karşılayan kontrolör ayarlarının hesaplandığı bir yöntem seçildi.
Çok boyutlu bir nesne için kontrol sisteminin sentezi de gerçekleştirildi: kademeli kontrol sistemi, birleşik kontrol sistemi, otonom kontrol sistemi. PI kontrolörlerin, kompansatörlerin ayar parametreleri hesaplandı, tipik etkilere tepkiler elde edildi.otomatik kontrol frekans kontrolörü
Anahtar Kelime Listesi:
Kontrol nesnesi, kontrolör, ayarlar, kontrol sistemi.
Hacim ayrıntıları:
İş hacmi - sayfalar
tablo sayısı-
Resim sayısı - 32
Kullanılan kaynak sayısı - 3
giriiş
Bu ders çalışmasında, başlangıç verileri, kontrol nesnesinin dinamik kanallardan birindeki geçiş işlevidir. Geçiş fonksiyonu ile belirtilen nesnenin parametrik tanımlamasının grafiksel yöntem, yaklaşım ve tanımlama yöntemleri ile gerçekleştirilmesi gerekmektedir.
Elde edilen verilere dayanarak, hangi modelin verilen nesneyi daha doğru tanımladığını belirleriz. Bu sorunun çözümü oldukça acil bir sorundur, çünkü genellikle matematiksel modelin kendisine değil, yalnızca ivme eğrisine sahibiz.
Nesne modelini seçtikten sonra PI denetleyicinin parametrelerini hesaplıyoruz. Hesaplama, Ziegler-Nichols yöntemleri ve genişletilmiş frekans yanıtları kullanılarak yapılır. Hangi yöntemle bulunduğunu belirlemek için en iyi ayarlar denetleyici, sürecin zayıflama derecesini bir kalite kriteri olarak kullanırız.
Bu çalışmada, üç türden çok boyutlu bir nesne için bir kontrol sisteminin sentezi gerçekleştirilir: otonom, kademeli, birleşik. Regülatörlerin ayar parametreleri hesaplanmış, sistemin çeşitli kanallardan tipik etkilere verdiği tepkiler incelenmiştir.
Bu ders çalışması eğiticidir. Uygulama sırasında edinilen beceriler uygulama sırasında kullanılabilir. dönem ödevi kontrol sistemlerinin modellenmesi ve nihai yeterlilik çalışması.
1. Kontrol nesnesinin tanımlanması
1.1 Uygulamayı kullanarak tanımlama Sistem Tanımlaması araç kutusu
Tanımlama, çıktı ve girdi sinyalleri arasındaki ilişkinin nitel düzeyde tanımlanmasıdır.
Tanımlama için System Identification ToolBox paketini kullanıyoruz. Simulink'te modeli oluşturalım.
Şekil 1.1.1. Kimlik şeması.
ident komutunu kullanarak System Identification ToolBox'a gidin.
Şekil 1.1.2. Sistem Tanımlama Araç Kutusu.
Verileri System Identification ToolBox'a aktarın:
Şekil 1.1.3. Veri içe aktarma
Transfer fonksiyonu katsayılarını elde ederiz:
Şekil 1.1.4. Kimlik sonuçları
K=44,9994 T=9,0905
1.2 Eğri Uydurma Araç Kutusu ile Uydurma
Yaklaşım veya yaklaşım, bir nesnenin sayısal özelliklerini ve özelliklerini keşfetmenizi sağlayan, sorunu daha basit veya daha uygun nesnelerin incelenmesine indirgeyen bir yöntemdir.
Yaklaşım için Curve Fitting Toolbox paketini kullanıyoruz Simulink'te gecikme bağlantısı olmadan bir model oluşturuyoruz.
Şekil 1.2.1. Yaklaşımı gerçekleştirmek için şema.
cftool komutunu kullanarak Eğri Sığdırma Araç Kutusu'na gidin. X ekseninde zamanı ve y ekseninde çıkış değerlerini seçiyoruz. Nesneyi a-b*exp(-c*x) fonksiyonu ile tanımlarız. biz alırız a,b katsayıları ve s.
Şekil 1.2.2. Yaklaşım sonuçları.
K=(a+b)/2=45 T=
1.3 Temel bağlantılarla yaklaşım (grafik yöntem)
Şekil 1.3.1. Grafik yöntem
Gecikme süresini belirleyin. K'yi belirlemek için, belirlenen değerden y eksenine düz bir çizgi çizeriz. Zaman sabitini belirlemek için, sabit değerin düz çizgisiyle kesişene kadar eğriye teğet çizeriz, kesişme noktasından apsis eksenine dik çizeriz ve elde edilen değerden gecikme süresini çıkarırız.
K=45 T=47
1.4 Geçiş fonksiyonlarının karşılaştırılması
Üç yöntemi karşılaştırmak için her yöntemin hatasını hesaplıyoruz, kareleri alınmış hataların toplamını buluyoruz ve varyansı buluyoruz. Bunu yapmak için simulink'te bir model oluşturacağız ve elde edilen parametreleri yerine koyacağız.
Şekil 1.4.1. Geçiş fonksiyonlarının karşılaştırılması.
Çalışma nesnesinin transfer fonksiyonunun parametrelerini elde etmek için üç yöntem kullanılır. Nesnenin ortaya çıkan matematiksel modelini değerlendirme kriteri hata varyansıdır ve bu göstergeye göre en iyi sonuçlar Eğri Sığdırma Aracı ile uydurma yönteminde işaretlenmiştir. Ayrıca, nesnenin matematiksel modeli olarak şunu alıyoruz: W=45/(1/0.022222+1)*e^(-22.5p).
2. Düzenleme kanununun seçimi
Denetleyiciyi orandan seçiyoruz
Çünkü bir PI denetleyici seçiyoruz.
3. ACS'nin tek boyutlu bir nesne ile sentezi
3.1 ACS'nin Ziegler-Nichols yöntemiyle hesaplanması
Ziegler-Nichols yöntemi, Nyquist kriterine dayanmaktadır. Yöntemin özü, kapalı sistemi kararlılık sınırına getiren böyle bir oransal denetleyici bulmak ve çalışma frekansını bulmaktır.
Belirli bir transfer fonksiyonu için faz-frekans karakteristiğini bulur ve grafiğini çizeriz.
Çalışma frekansını PFC kesişme noktası s'nin apsisi olarak tanımlıyoruz.Çalışma frekansı 0.082'dir.
Pirinç. 3.1.1 Çalışma frekansını bulma
PI denetleyicisi için ayarları hesaplayın Kkr katsayısını hesaplayın:
Elde edilen değerden orantılılık katsayısını hesaplıyoruz:
İzodrom süresini hesaplıyoruz:
ilişkiyi bulalım:
Pirinç. 3.1.2 Adım fonksiyonuna kontrol kanalı üzerinden sistem yanıtı
Pirinç. 3.1.3 Pertürbasyon kanalı aracılığıyla sistemin adım fonksiyonuna yanıtı
Pirinç. 3.1.4 Sistemin pertürbasyon kanalı yoluyla impuls fonksiyonuna yanıtı
Pirinç. 3.1.5 Sistemin kontrol kanalı üzerinden impuls fonksiyonuna yanıtı
Zayıflama derecesini aşağıdaki formüle göre hesaplayın:
Zayıflama derecesinin ortalama değerini 0,93 olarak buluyoruz ve gerçek değer olan 0,85 ile karşılaştırıyoruz.
3.2 Genişletilmiş frekans yanıtı yöntemiyle ACS'nin hesaplanması
Bu yöntem tamamen değiştirilmiş Nyquist kriterinin (E. Dudnikov kriteri) kullanımına dayanmaktadır ve şunu belirtir: eğer bir açık çevrim sistem kararlıysa ve genişletilmiş genlik-faz karakteristiği [-1, j0] koordinatlarına sahip bir noktadan geçiyorsa , o zaman kapalı çevrim sistem sadece kararlı olmayacak, aynı zamanda salınım derecesiyle belirlenen belirli bir kararlılık payına sahip olacaktır.
- (3.2.1) bir açık sistemin genişletilmiş frekans tepkisi;
-(3.2.2) açık bir sistemin genişletilmiş PFC'si.
Bir PI denetleyicisi için genişletilmiş frekans yanıtları şunlardır:
Mathcad ortamında hesaplama:
W = 0,85 m=0,302 için
Mathcad ortamında PI controller ayarlarını hesaplayalım:
Nesnenin genişletilmiş frekans özellikleri alanına geçelim. Bunu yapmak için bir ikame yapalım:
Kontrolörün genişletilmiş frekans yanıtı alanına geçelim:
Kontrolörün genişletilmiş frekans yanıtı:
Regülatörün genişletilmiş faz frekansı yanıtı:
(3.2.6) denklemindeki bazı dönüşümlerden sonra şunu elde ederiz:
Bir grafik oluşturalım:
Şekil.3.2.1 Genişletilmiş frekans yanıtı yöntemini kullanan ayarların parametreleri
Grafikten, ilk turdaki maksimum Kp / Tu değerini ve buna karşılık gelen Kp değerini hesaplıyoruz:
Kp=0,00565 Kp/Tu=0,00034
Sistemin kontrol ve bozulma kanalları aracılığıyla tipik sinyallere tepkisini inceleyelim.
Kontrol kanalında geçiş işlevi:
Pirinç. 3.2.2 Adım fonksiyonuna kontrol kanalı üzerinden sistem yanıtı
Pertürbasyon kanalı üzerinden geçiş fonksiyonu:
Pirinç. 3.2.3 Pertürbasyon kanalı aracılığıyla sistemin adım fonksiyonuna yanıtı
Pertürbasyon kanalında impuls geçiş fonksiyonu:
Pirinç. 3.2.4 Pertürbasyon kanalı aracılığıyla impuls fonksiyonuna sistem yanıtı
Kontrol kanalı üzerinden geçici darbe fonksiyonu:
Pirinç. 3.2.5 Kontrol kanalı üzerinden impuls fonksiyonuna sistem yanıtı
Zayıflama derecesini hesaplayın:
Kontrol kanalındaki geçiş işlevi için
Pertürbasyon kanalı boyunca geçiş fonksiyonu için
Pertürbasyon kanalı boyunca impuls geçiş fonksiyonu için
Kontrol kanalı üzerinden geçici darbe işlevi için
Zayıflama derecesinin ortalama değerini 0,98 olarak buluyoruz ve gerçek değer olan 0,85 ile karşılaştırıyoruz.
Genişletilmiş frekans yanıtı yöntemi ve Ziegler-Nichols yöntemi kullanılarak PI denetleyici ayarları ve zayıflama derecesi hesaplandı. Ziegler-Nichols yöntemi kullanılarak elde edilen zayıflama derecesinin ortalama değeri, gerçek değeri %9,41 oranında aşmaktadır. Genişletilmiş frekans tepkisi yöntemiyle elde edilen zayıflama derecesinin ortalama değeri, gerçek değeri %15,29 oranında aştı. Bundan, Ziegler-Nichols yöntemiyle elde edilen değerleri kullanmanın daha iyi olduğu sonucu çıkar.
4. Çok boyutlu bir nesne için otomatik kontrol sistemlerinin sentezi
4.1 Kademeli kontrol sistemlerinin sentezi
Kademeli sistemler, en tehlikeli bozulmalara göre daha az eylemsiz olan bir ara koordinat seçmek ve bunun için ana çıktıyla aynı kontrol eylemini kullanmak mümkünse, kontrol kanalı boyunca büyük bir ataleti olan nesneleri otomatikleştirmek için kullanılır. nesnenin.
Pirinç. 4.1.1 Kademeli kontrol sistemi
Bu durumda, kontrol sistemine iki regülatör dahil edilmiştir - y nesnesinin ana çıkışını stabilize etmeye yarayan ana (harici) regülatör ve y1 yardımcı koordinatını düzenlemek için tasarlanmış yardımcı (dahili) regülatör. Yardımcı denetleyici için referans, ana denetleyicinin çıkış sinyalidir.
Kademeli ACP'nin hesaplanması, ana ve yardımcı kanallar için nesnenin verilen dinamik özellikleri için ana ve yardımcı kontrolörlerin ayarlarının belirlenmesini içerir. Ana ve yardımcı regülatörlerin ayarları birbiriyle ilişkili olduğu için iterasyon yöntemi ile hesaplanır.
Her yineleme adımında, denetleyicilerden birinin koşullu olarak eşdeğer bir nesneye atıfta bulunduğu azaltılmış tek döngülü bir ACP hesaplanır. Ana denetleyici için eşdeğer nesne seri bağlantı kapalı yardımcı devre ve ana kontrol kanalı; transfer fonksiyonu:
(4.1.1.)
Yardımcı regülatör için eşdeğer varlık, yardımcı kanal ile ana açık döngünün paralel bağlantısıdır. Transfer fonksiyonu:
(4.1.2.)
İlk yineleme adımına bağlı olarak, kademeli ACP'leri hesaplamak için iki yöntem vardır:
1. yöntem. Hesaplama ana regülatör ile başlar. Yöntem, yardımcı kanalın ataletinin ana kanaldan çok daha az olduğu durumlarda kullanılır.
İlk adımda, ana devrenin çalışma frekansının yardımcı devreden çok daha az olduğu varsayımı yapılır. Daha sonra:
(4.1.3.)
Böylece, ilk yaklaşımda, ana denetleyicinin ayarları, yardımcı denetleyicinin ayarlarına bağlı değildir ve WE0main(p)'ye göre bulunur.
İkinci adımda, eşdeğer nesne için yardımcı denetleyicinin ayarları hesaplanır.
Yaklaşık hesaplamalar söz konusu olduğunda, bunlar ilk iki adımla sınırlıdır. Kesin hesaplamalar için, birbirini izleyen iki iterasyonda bulunan denetleyici ayarları belirtilen doğrulukla örtüşene kadar devam edilir.
2. yöntem. Hesaplama bir yardımcı regülatör ile başlar. İlk adımda, harici regülatörün devre dışı olduğu varsayılır, yani:
Böylece, ilk yaklaşımda, yardımcı regülatörün ayarları, yardımcı kontrol kanalı için tek döngülü ACP'den bulunur. İkinci adımda, ana denetleyicinin ayarları, yardımcı denetleyicinin ayarları dikkate alınarak eşdeğer nesne WE1main(p)'nin transfer fonksiyonundan hesaplanır. Yardımcı denetleyicinin ayarlarını iyileştirmek için, hesaplama, ana denetleyicinin bulunan ayarlarının ikame edildiği transfer işlevine göre gerçekleştirilir. Hesaplamalar, ardışık iki iterasyonda bulunan yardımcı denetleyicinin ayarları belirtilen doğrulukla eşleşmeyene kadar gerçekleştirilir.
Yardımcı PI denetleyicisinin parametrelerini hesaplayalım:
Şekil 4.1.2. Kontrol kanalı aracılığıyla adım eylemine yanıt
Şekil 4.1.3. Tedirginlik kanalı boyunca bir adım eylemine yanıt
Şekil 4.1.4. Kontrol kanalı aracılığıyla impuls eylemine yanıt
Şekil 4.1.5. Tedirginlik kanalı yoluyla impuls eylemine yanıt
Sistem, görev için kovaryanttır ve pertürbasyon için değişmezdir. Ana kalite kriteri yerine getirilir - geçici sürecin türü. Düzenleme süresi şeklindeki ikinci kalite kriteri karşılanmamaktadır. Karşılanan kriterler dinamik hata.
4.2 Birleşik kontrol sisteminin sentezi
Nesneye ölçülebilen sert darbelerin uygulandığı bir durum vardır, ancak tek döngülü bir kontrol sistemi önerilmez, ancak iki ilkenin bir kombinasyonu olan sözde birleşik sistem - geri bildirim ilkesi ve ilke rahatsızlık telafisi.
Tedirginliğin nesne üzerindeki etkisinden önce durdurulması ve bir yardımcı regülatör yardımıyla eylemlerinin telafi edilmesi önerilmektedir.
Şekil 4.2.1. Kombine kontrol sistemi
Şekil 1'de gösterilen devreye uygulayın. 4.2.1, bozucu eylem yv'ye göre çıkış değeri y'nin değişmezlik koşulu:
Bir kesintiye karşı değişmezlik ilkesi: bir sistemin bir bozukluğa karşı değişmez olması için, kontrol kanalı üzerindeki transfer fonksiyonunun sıfıra eşit olması gerekir. Ardından kompansatörün transfer fonksiyonu şu şekilde yazılacaktır:
(4.2.2.)
Newton'un standart binom formlarını kullanarak denetleyicinin Mathcad'indeki PI denetleyicisini hesaplayalım:
Kontrol kanalında adım eylemi:
Şekil 4.2.2. Kontrol kanalı aracılığıyla adım eylemine yanıt
Tedirginlik kanalı boyunca adım eylemi:
Şekil 4.2.3. Tedirginlik kanalı boyunca bir adım eylemine yanıt
Kontrol kanalında impuls eylemi:
Şekil 4.2.4. Kontrol kanalı aracılığıyla impuls eylemine yanıt
Tedirginlik kanalı aracılığıyla impuls eylemi:
Şekil 4.2.5. Tedirginlik kanalı yoluyla impuls eylemine yanıt
Sistem, görev için kovaryanttır ve pertürbasyon için değişmezdir. Kontrol süresi şeklindeki kalite kriteri karşılanmamaktadır. Dinamik hata kriteri karşılanmıyor. Sistem, statikteki bir bozulmaya karşı değişmez, ancak onu oluşturan elemanların atalet özelliklerinden dolayı dinamikte değişmez değildir.
4.3 Sentez otonom sistem yönetmek
Çok boyutlu nesneleri yönetirken genellikle aşağıdaki resimle karşılaşırız:
Pirinç. 4.3.1 İki giriş ve iki çıkış değişkenli kontrol nesnesi
X1,X2 - kontrol değişkenleri
Y1,Y2 - kontrol edilen değişkenler
U1,U2 - doğrudan bağlantılar
P1,P2 - çapraz bağlantılar.
Çıkış değişkeni y1 için kontrol değişkeni olarak x2 değişkenini seçersek, çapraz kanallar nedeniyle x2 kontrol değişkeni W21 transfer fonksiyonu aracılığıyla y1 değişkenini etkileyecek ve x1 kontrol değişkeni y2 aracılığıyla W12'yi etkileyecektir. Bu koşullar, böyle bir sistemin hesaplanmasını önemli ölçüde karmaşıklaştırır.
Sisteme ek gereksinimler - kontrol kanallarının özerkliği için gereksinimler - getirilirse, hesaplama görevi büyük ölçüde basitleştirilir. Kontrol kanallarının özerkliği, giriş değişkenleri arasına ek bağlantılar getirilerek elde edilebilir, bu tür cihazlara kompansatör denir.
Pirinç. 4.3.2 2B nesne kontrol sistemi
Dengeleyicilerin piyasaya sürülmesinin bir sonucu olarak, telafi edici etkileri hesaba katarak orijinal değişkenleri etkileyen yeni kontrol değişkenleri ortaya çıkmıştır.
Kompansatörlerin transfer fonksiyonlarını hesaplıyoruz:
PI denetleyicilerinin ayar parametrelerini Newton'un standart binom formlarını kullanarak hesaplıyoruz.
Mathcad'deki ilk PI denetleyicisini hesaplayalım:
Mathcad'deki ikinci PI denetleyicisini hesaplayalım:
Birinci kontrol kanalında geçiş fonksiyonu:
Pirinç. 4.3.3. Adım eylemine sistem yanıtı
İkinci kontrol kanalında geçiş işlevi:
Pirinç. 4.3.4. Adım eylemine sistem yanıtı
Sistem, görev için kovaryanttır ve pertürbasyon için değişmezdir. Ana kalite kriteri yerine getirilir - geçici sürecin türü. İkinci kalite kriteri ise zaman şeklinde karşılanmaktadır.
Çözüm
Çalışmanın ilk paragrafında tabloda verilen fonksiyonların tanımlanmasında kullanılan yöntemler ele alınmıştır. Üç yöntem dikkate alındı: Sistem Tanımlama Araç Kutusunu kullanan tanımlama yöntemi, Eğri Sığdırma Araç Kutusu paketini kullanan yaklaşım yöntemi ve temel bağlantı yaklaşım yöntemi. Yaklaştırma sonuçlarına göre en uygun model seçilmiştir. Eğri Sığdırma Aracı kullanılarak yaklaşık olarak elde edilen bir model olduğu ortaya çıktı.
Daha sonra kontrol yasası belirlendi ve PI denetleyici ayarları iki yöntem kullanılarak hesaplandı: genişletilmiş frekans yanıtı yöntemi ve Ziegler-Nichols yöntemi. Zayıflama oranları karşılaştırıldığında Ziegler-Nichols yöntemi ile elde edilen değerlerin kullanılmasının daha doğru olduğu tespit edilmiştir.
Ders çalışmasının dördüncü noktası, sistemlerin modellenmesiydi. Çok boyutlu bir nesne için kontrol sistemlerinin sentezini gerçekleştirdik. Bu sistemler için, Newton'un standart binom formlarının kullanıldığı hesaplama için PI kontrolörlerinin yanı sıra bozucu dengeleyiciler hesaplandı. Sistemlerin tipik girdi eylemlerine verdiği yanıtlar elde edildi.
Kullanılan kaynakların listesi
Otomatik kontrol teorisi: üniversiteler için bir ders kitabı / V. Ya. Rotach. - 5. baskı, gözden geçirilmiş. ve ek - M.: MPEI Yayınevi, 2008. - 396 s., hasta.
Modal kontrol ve izleme cihazları / N.T. Kuzovkov. - M.: "Mühendislik", 1976. - 184 s.
Matlab Danışmanlık Merkezi [Elektronik kaynak] // MATLAB.Exponenta, 2001-2014. URL: http://matlab.exponenta.ru Erişim tarihi: 03/12/2016.
Allbest.ru'da barındırılıyor
...Benzer Belgeler
Alternatif bir genişletilmiş frekans yanıtı yönteminin analizi. Programın MatLab ortamında uygulanması, kontrol nesnesinin transfer fonksiyonunu, kontrolör ayarlarının kapalı ACS'sinin geçici sürecinin kalite parametrelerini hesaplamak için.
laboratuvar çalışması, 11/05/2016 eklendi
Genişletilmiş frekans yanıtı yöntemi. Kalite göstergeleri için gereksinimlere genel bakış. Bilgisayar yöntemleri otomatik kontrol sistemlerinin Matlab ortamında sentezi. Sistemin eşit zayıflama hattının inşası. Tanım optimum ayarlar regülatör.
laboratuvar çalışması, 30.10.2016 eklendi
Sağlayan ayrı bir denetleyicinin hesaplanması en yüksek hız geçiş süreci İntegral ikinci dereceden bir kriterin oluşturulması. Dengeleyici sentezi, sürekli ve ayrık denetleyici, dengeleyici, optimal kontrol yasası.
dönem ödevi, 19.12.2010 tarihinde eklendi
Belirli bir transfer fonksiyonuna sahip bir kontrol nesnesi için bir kontrolör seçme. Kontrol nesnesinin ve otomatik kontrol sisteminin analizi. Kontrol nesnesinin geçici ve dürtü fonksiyonlarının tahmini. Şematik diyagramlar denetleyici ve karşılaştırıcı.
dönem ödevi, 09/03/2012 eklendi
Pozisyon türlerinin seçimi, gerekçesi, hız, akım kontrolörleri, ayarlarının hesaplanması. Modal ve simetrik optimum yöntemlerle kontrol sisteminin sentezi. Düzenleme nesnesinin geçici özelliklerinin kontrollü değerlerle oluşturulması.
dönem ödevi, 04/01/2012 eklendi
Değişken durumlarda otomatik kontrol nesnesinin açıklaması. Kapalı bir lineerleştirilmiş analogdan dijitale sistemin ayrık transfer fonksiyonunun belirlenmesi. Sistemin geçici yanıt, kontrol sinyali ve frekans yanıtı grafikleri.
dönem ödevi, 21.11.2012 tarihinde eklendi
Yarı-durağan bir nesne için bir kontrol sisteminin sentezi. Durağan olmayan dinamik bir nesnenin matematiksel modeli. Kontrol sistemi bağlantılarının transfer fonksiyonları. Arzu edilen logaritmik genlik-frekans ve faz-frekans özelliklerinin oluşturulması.
dönem ödevi, 06/14/2010 eklendi
Nesnenin dinamik özelliklerinin belirlenmesi. Frekans ve zaman özelliklerinin tanımı ve yapısı. PI denetleyicisi için en uygun ayarların hesaplanması. Hurwitz kriteri ile kararlılığın kontrol edilmesi. Geçiş sürecinin inşası ve kalitesi.
dönem ödevi, 04/05/2014 eklendi
Otomatik kontrol sistemi modlarının incelenmesi. Kapalı bir sistemin transfer fonksiyonunun belirlenmesi. Logaritmik genlik ve faz frekans özelliklerinin oluşturulması. "Nesne düzenleyici" sistemin sentezi, optimal parametrelerin hesaplanması.
dönem ödevi, 06/17/2011 eklendi
Sistem gereksinimlerinin formülasyonu ve elektrikli tahrik parametrelerinin hesaplanması. Akım regülatörünün sentezi. Hız kontrol cihazının hesaplanması. Alt kontrol sistemindeki geçici süreçlerin "Matlab" programı kullanılarak incelenmesi. Bir röle sisteminin sentezi.
Düzeltmenin görevi, hem kararlı durumdaki hem de geçici durumdaki sistemlerin doğruluğunu artırmaktır. Tipik modlarda kontrol hatalarını azaltma arzusu, özel önlemler almadan (ek bağlantıların kurulumu - düzeltici cihazlar) açık döngü otomatik kontrol sisteminin kazanç değerlerinin kullanılması ihtiyacına yol açtığında ortaya çıkar. , sistem kararsız hale gelir.
| Düzeltici cihaz türleri |
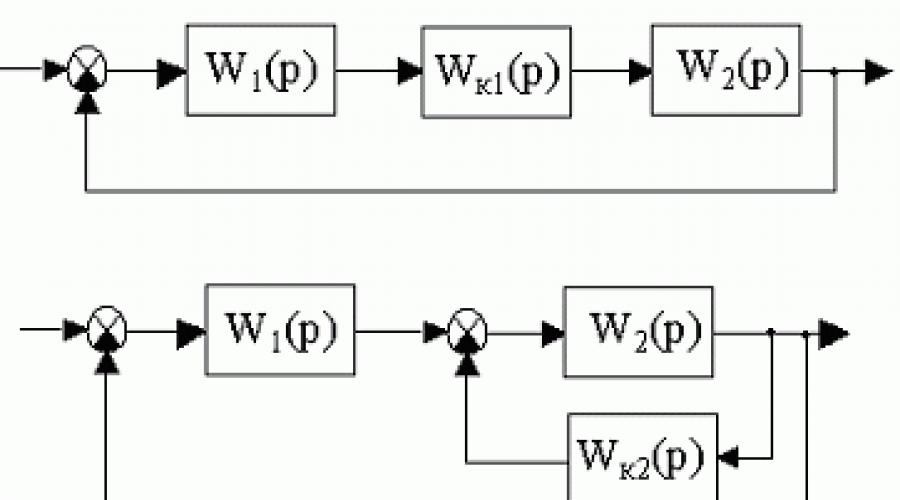
Üç tür ana düzeltici cihaz vardır (Şekil 6.1): seri (W k1 (p)), yerel geri besleme (W k2 (p)) ve paralel (W k3 (p)) şeklinde.

Şekil 6.1. blok diyagramları düzeltici cihazlar
Ardışık düzeltici cihazları kullanan düzeltme yöntemi, hesaplamalarda basittir ve teknik olarak kolayca uygulanır. yani o buldu geniş uygulama, özellikle kullanan sistemleri düzeltirken elektrik devreleri modüle edilmemiş sinyal ile Bağlantıların parametrelerinde sapma olmayan sistemlerde sıralı düzeltici cihazların kullanılması tavsiye edilir. Aksi takdirde, düzeltme parametrelerinin ayarlanması gerekir.
Bir paralel düzeltici cihaz kullanılarak kontrol sistemlerinin düzeltilmesi, atalet bağlantılarının yüksek frekanslı şöntlemesine ihtiyaç duyulduğunda etkilidir. Bu durumda, ortaya çıkan tüm dezavantajlarla birlikte hata sinyalinin türevlerinin ve integrallerinin eklenmesiyle oldukça karmaşık kontrol yasaları oluşturulur.
Yerel (yerel) geri bildirimle düzeltme en çok otomatik kontrol sistemlerinde kullanılır. Yerel geri bildirim biçimindeki düzeltmenin avantajı, yerel devrede yer alan bağlantıların özelliklerinin doğrusal olmayan özelliklerinin etkisinin önemli ölçüde zayıflamasının yanı sıra, kontrolör ayarlarının cihaz parametrelerinin kaymasına bağımlılığının azalmasıdır. .
Bir veya daha fazla türde düzeltici cihazın kullanımı, örn. seri bağlantılar, paralel bağlantılar veya geri bildirim, teknik uygulamanın uygunluğu ile belirlenir. Bu durumda, açık bir sistemin transfer işlevi, farklı düzeltici bağlantıların dahil edilmesiyle aynı olmalıdır:
Yukarıdaki formül (6.1), en basit ve en kolay uygulananı seçmek için bir düzeltme türünün diğerine göre yeniden hesaplanmasına izin verir.
Uzak ve Yazışma Departmanı
| ACS sentezi |
Bir sistemin sentezi, amacı: sistemin rasyonel bir yapısını oluşturmak; bireysel bağlantıların parametrelerinin optimal değerlerini bulmak. birçok kişiyle Muhtemel çözümlerönce formüle edilmelidir teknik gereksinimler sisteme. ACS'ye uygulanan belirli kısıtlamalara tabi olarak, bir optimizasyon kriteri seçmek gerekir - statik ve dinamik doğruluk, hız, güvenilirlik, enerji maliyetleri, fiyat vb.
Mühendislik sentezinde aşağıdaki görevler belirlenir: gerekli doğruluğu elde etmek; geçici süreçlerin belirli bir doğasını sağlamak. Bu durumda, sentez, belirtilenlerden daha kötü olmayan kalite göstergeleri sağlamak için sistemin değişmeyen kısmına eklenmesi gereken düzeltici araçların türünü ve parametrelerini belirlemeye indirgenir.
Mühendislik uygulamalarında en yaygın kullanılan logaritmik frekans karakteristiklerini kullanan frekans sentezi yöntemidir.
Kontrol sisteminin sentez süreci aşağıdaki işlemleri içerir:
- regülatörsüz ve düzeltici cihazsız ayarlanabilir bir nesneden oluşan W 0 (ω) başlangıç sisteminin tek kullanımlık LACH L 0 (ω) yapısı;
- doğruluk gerekliliklerine (astatizm) dayalı olarak istenen LAFC'nin düşük frekanslı bölümünün inşası;
- belirli bir aşma ve kontrol süresi t p ACS sağlayarak, istenen LACHH'nin orta frekans bölümünün inşası;
- istenen l.a.h'nin orta frekans bölümü ile düşük-koordinasyonu. en basit düzeltici cihazın elde edilmesi şartıyla;
- istenen L.A.H.'nin yüksek frekanslı kısmının iyileştirilmesi. gerekli stabilite marjını sağlamak için gerekliliklere dayalı olarak;
- sıralı düzeltme cihazının tipinin ve parametrelerinin belirlenmesi L ku (ω) = L W (ω) - L 0 (ω), çünkü W W (p) \u003d W ku (p) * W 0 (p);
- düzeltici cihazların teknik uygulaması. Gerekirse, eşdeğer bir paralel bağlantı veya işletim sistemi için yeniden hesaplama yapılır;
- doğrulama hesaplaması ve geçici sürecin inşası.
İstenilen L.A.H. parça parça üretilir.
İstenen l.a.h.'nin düşük frekanslı kısmı. sabit durumda kontrol sisteminin gerekli doğruluğunun sağlanması koşulundan, yani sistemin kararlı durum hatasının Δ() belirtilen değeri Δ()≤Δ s geçmemesi koşulundan oluşur.
İstenen L.A.C. için yasaklanmış düşük frekans bölgesinin oluşumu. Belki Farklı yollar. Örneğin, girişe sinüzoidal bir sinyal uygulandığında, aşağıdaki kabul edilebilir göstergelerin sağlanması gerekir: Δ m - maksimum hata genliği; v m - maksimum izleme hızı; ε m - maksimum izleme ivmesi. Daha önce, bir harmonik sinyalin yeniden üretilmesindeki hatanın genliğinin Δ m =g m / W(jω k) , yani. açık döngü ACS'nin transfer fonksiyonu modülü ve giriş eyleminin genliği tarafından belirlenir g m . ACS hatasının Δ c'yi geçmemesi için istenilen l.a.h. koordinatları ile A to kontrol noktasının altından geçmemelidir: ω=ω to, L(ω to)= 20lg|W(jω k)| =20lg gm /Δm .
Aşağıdaki oranlar bilinmektedir:
g(t) = g m sin(ω k t); g "(t) \u003d g m (ω k t); g "" (t) \u003d -g m ω k 2 günah (ω k t);
vm = gmk; ε m = gm ω k2 ; g m \u003d v m 2 /ε m; ω k = ε m / v m . (6.2)
İzleme genliği, izleme hızı ve ivmede gerekli hata ile çalışmayı sağlayan 1. mertebe astatizme sahip sisteme karşılık gelen yasak bölge Şekil 1'de gösterilmiştir. 6.2.

Şekil 6.2. Yasak alan istenilen l.a.h.
Hız için kalite faktörü K ν =v m / Δ m , hızlanma için kalite faktörü K ε =ε m / Δ m . Girişe g(t)=g 0 =const sinyali uygulandığında sadece bir statik kontrol hatası sağlamak isteniyorsa, o zaman istenilen L.A.C. 0 dB/dec eğime sahip olmalı ve 20lgK tr seviyesinde geçmelidir, burada K tr (açık çevrim ACS'nin gerekli kazancı) formülle hesaplanır.
Δ s ()=ε st =g 0 /(1+ K tr), dolayısıyla K tr ≥ -1.
ν=sabit'te g(t)=νt sürüş etkisinden belirli bir doğrulukla izleme sağlamak gerekirse, o zaman sabit durum hız hatası ε sk () =ν/K tr. Buradan K tr =ν/εck bulunur ve hız kalite faktörü K ν = K tr =ν/ε ck veya a aracılığıyla istenen LAH'ın düşük frekanslı kısmı -20 dB/dec eğimle çizilir. koordinatlı nokta: ω=1 c -1, L( 1)=20lgk trdb.
Daha önce gösterildiği gibi, istenen L.A.C.'nin orta frekans bölgesi. geçici sürecin kalitesinin ana göstergelerini sağlar - aşma σ ve kontrol süresi t p. -20 dB/dec eğime sahip olmalı ve frekans eksenini V.V. Solodovnikov'un nomogramlarıyla belirlenen ω cf kesme frekansında kesmelidir (Şekil 6.3). Tasarlanan sistemin statiksizlik sırasının dikkate alınması ve ilgili nomograma göre ω cf seçilmesi önerilir.

Şekil 6.3. Solodovnikov kalitesinin Nomogramları:
a - 1. dereceden astatik kundağı motorlu toplar için; b - statik ACS için
Örneğin, σ m = %35 ve t p = 0,6 s için, 1. dereceden astatik sistem için nomogramı (Şekil 6.3, a) kullanarak, t p = 4,33 π / ω sr veya ω sr = 21,7 s -1 elde ederiz.
ω cf =21.7 s -1 ile -20 dB/dec eğimli düz bir çizgi çizilmesi gerekir ve mutlak değerde gerekli stabilite marjının sağlanması koşulundan orta frekans bölümünün genişliği belirlenir ve faz. Stabilite marjlarının oluşturulmasına yönelik farklı yaklaşımlar vardır. Unutulmamalıdır ki, sistemdeki kesme frekansı ne kadar yüksek olursa, büyük olasılıkla hesaplamalarda dikkate alınmayan bireysel ACS cihazlarının küçük zaman sabitlerinin hatasının etkileneceği gerçeği. Bu nedenle, artan ω cf ile faz ve modüldeki stabilite marjlarının yapay olarak arttırılması önerilir. Bu nedenle, iki tip ACS için verilen tablonun kullanılması önerilir. Geçici olayların kalitesi için yüksek gereksinimler söz konusu olduğunda, örneğin,
20%<σ m <24%;  ,
,
25%<σ m <45%;  ,
,
aşağıdaki ortalama kararlılık göstergeleri önerilir: φ zap =30°, H m =12 dB, -H m =10 dB.
Şekil 6.4, genişliği gerekli stabilite marjlarını sağlayan istenen L.A.H.'nin orta frekans bölümünün bir görünümünü göstermektedir.

Şekil 6.4. İstenen l.a.h.'nin orta frekans kısmı.
Bundan sonra, orta ve düşük frekansların bölümleri, en basit düzeltici cihaz elde etme koşulundan -40 veya -60 dB/dec eğimli düz çizgi parçaları ile eşleştirilir.
İstenen l.a.h.'nin yüksek frekans bölümünün eğimi. mevcut LAC'nin yüksek frekans bölümünün eğimine eşit bırakılması önerilir. Bu durumda, düzeltici cihaz gürültüye karşı daha dayanıklı olacaktır. İstenen L.A.H.'nin orta ve yüksek frekans bölümlerinin eşleştirilmesi. ayrıca basit bir düzeltici cihaz elde edilmesi ve ek olarak gerekli stabilite marjlarının sağlanması dikkate alınarak gerçekleştirilir.
İstenen açık çevrim sistemin transfer fonksiyonu W W(p), istenen L.A.H. L W (ω). Daha sonra, istenen açık çevrim ACS'nin faz frekans yanıtı ve istenen kapalı döngü sistemin geçici yanıtı oluşturulur ve tasarlanan sistemin fiilen elde edilen kalite göstergeleri değerlendirilir. Gerekli değerleri karşılıyorlarsa, istenen L.A.Ch. tamamlanmış kabul edilir, aksi takdirde oluşturulan istenen LFC düzeltilmelidir. Aşmayı azaltmak için istenen L.A.H.'nin orta frekans bölümü genişletilir. (değeri artırın ±H m). Sistem performansını artırmak için kesme frekansını artırmanız gerekir.
Sıralı bir düzeltme cihazının parametrelerini belirlemek için şunlar gereklidir:
a) istenen l.a.h'den çıkarın. L w tek kullanımlık l.a.h. L 0 , yani bul l.a.h. minimum faz düzeltici cihaz L ku;
b) L.a.h. sıralı düzeltici cihaz Lku, transfer fonksiyonunu yazar ve belirli bir devre ve uygulama seçmek için referans literatürü kullanır.
Şekil 6.5, bir sıralı düzeltici cihazın transfer fonksiyonunun belirlenmesine ilişkin bir örneği göstermektedir.

Şekil 6.5. LAH mevcut L 0 , istenen L w açık döngü sistemi
ve sıralı düzeltici cihaz L ku
Grafiksel çıkarmadan sonra, düzeltici cihazın aşağıdaki transfer fonksiyonunu elde ederiz.

Paralel bir düzeltici cihaz veya yerel geri besleme biçimindeki bir düzeltici cihaz, formül (6.1)'e göre yeniden hesaplama ile elde edilebilir.
Elde edilen W ku (p) transfer fonksiyonuna dayanarak, donanım veya yazılımda uygulanabilen gerçek bir düzeltici cihaz tasarlamak gerekir. Donanım uygulaması durumunda, düzeltici bağlantının şemasını ve parametrelerini seçmek gerekir. Literatür, hem doğru hem de alternatif akımda hem pasif hem de aktif tipik düzeltici cihazların tablolarını içerir. Bir bilgisayarın otomatik kontrol sistemini kontrol etmek için kullanılması durumunda, bir yazılım uygulaması tercih edilir.
© V.N. Bakaev, Vologda 2004. Elektronik versiyonun geliştirilmesi: M.A. Gladyshev, I.A. Çuranov.
Vologda Devlet Teknik Üniversitesi.
Uzaktan ve Mektupla Eğitim Dairesi Başkanlığı
Şu anda, Şekil 6.6'da açıklanan ikincil düzenleme ilkesi üzerine inşa edilmiş sistemler yaygın olarak kullanılmaktadır. Sistem, denetleyicileri W pi (p) ile n kontrol döngüsü sağlar ve dış döngü denetleyicisinin çıkış sinyali, iç döngü için öngörülen değerdir, yani. her iç devrenin işi dış devreye tabidir.

Şekil 6.6. Alt düzenlemenin ACS'sinin yapısal diyagramı
Alt kontrol sistemlerinin çalışmasını iki ana avantaj belirler.
1. Hesaplaması ve ayarlaması kolaydır. Devreye alma sırasında ayar, iç konturdan başlayarak gerçekleştirilir. Her devre, standart özelliklerin elde edildiği parametreler ve yapı nedeniyle bir regülatör içerir. Ayrıca her devrede en büyük zaman sabiti dengelenir.
2. Sistemin ara koordinatlarının sınır değerlerini sınırlama kolaylığı. Bu, harici döngü denetleyicisinin çıkış sinyalini belirli bir değerle sınırlayarak elde edilir.
Aynı zamanda, bir alt kontrol sistemi oluşturma ilkesinden, her bir dış devrenin hızının karşılık gelen dahili devrenin hızından daha düşük olacağı açıktır. Aslında, birincil devrede L.A.C. 1/2T μ olacaktır, burada 2T μ küçük kompanze edilmemiş zaman sabitlerinin toplamıdır, o zaman dış devrede küçük zaman sabitlerine sahip diğer bağlantıların yokluğunda bile L.A.C. 1/4T μ olacak, vb. Bu nedenle, köle kontrol sistemleri nadiren üçten fazla devre ile inşa edilir.
Şekil 6.7'deki tipik bir devreyi alıp modüler (MO) ve simetrik (CO) optimumlar için ayarlayalım.

Şekil 6.7. Tipik devre şeması
Şekil 6.7'deki şemada belirtilmiştir: T μ - küçük zaman sabitlerinin toplamı;
T hakkında - telafi edilecek büyük bir zaman sabiti; K ε ve K O sırasıyla küçük zaman sabitlerine sahip blokların ve kontrol nesnesinin kazançlarıdır. W p (p) denetleyici tipinin, zaman sabiti kompanze edilmesi gereken bağlantı tipine de bağlı olduğuna dikkat edilmelidir. P, I, PI ve PID olabilir. Örnek olarak bir PI denetleyicisini ele alalım:
![]() .
.
Modüler optimum için parametreleri seçiyoruz:
![]()
Ardından, açık döngü aktarım işlevi şöyle görünecektir:
![]()
W(p) transfer fonksiyonuna karşılık gelen logaritmik frekans yanıtları, Şekil 6.8 a'da gösterilmektedir.

Şekil 6.8. Modüler ayarlı LFC ve h(t)
Kademeli bir kontrol eylemiyle, çıkış değeri ilk kez 4,7 Tμ'lik bir sürenin ardından sabit bir değere ulaşır, aşma %4,3'tür ve faz marjı 63 °'dir (Şekil 6.8, b). Kapalı bir ACS'nin transfer işlevi şu şekildedir:

Kapalı bir ACS'nin karakteristik denklemini Т 2 р 2 +2ξТр+1=0 şeklinde temsil edersek, modüler optimumdaki sönüm katsayısı şu değere sahiptir: ![]() . Aynı zamanda, düzenleme süresinin büyük zaman sabiti To'ya bağlı olmadığı da görülebilir. Sistem birinci dereceden astatizme sahiptir. Sistemi simetrik bir optimum için ayarlarken, PI denetleyici parametreleri aşağıdaki gibi seçilir:
. Aynı zamanda, düzenleme süresinin büyük zaman sabiti To'ya bağlı olmadığı da görülebilir. Sistem birinci dereceden astatizme sahiptir. Sistemi simetrik bir optimum için ayarlarken, PI denetleyici parametreleri aşağıdaki gibi seçilir:
![]()
Daha sonra açık döngü transfer fonksiyonu şu forma sahiptir:


Buna karşılık gelen logaritmik frekans yanıtları ve geçici sürecin grafiği Şekil 6.9'da sunulmuştur.

Şekil 6.9. Simetrik bir optimuma ayarlandığında LFC ve h(t)
Sabit değerin çıkış değerinin ilk elde edilme zamanı 3,1T μ , maksimum aşma %43'e ulaşır, faz marjı -37°'dir. ACS ikinci dereceden astatizm kazanır. En büyük zaman sabitine sahip bağlantı 1. dereceden periyodik değilse, o zaman T o =4T μ'de PI kontrolörü ile geçici süreçlerin MO'ya ayarlandığındaki süreçlere karşılık geldiğine dikkat edilmelidir. Eğer<4Т μ , то настройка регулятора на τ=Т μ теряет смысл. Необходимо выбрать другой тип регулятора.
TAU'da, diğer optimum kontrolör ayarları türleri de bilinmektedir, örneğin:
- binom, ACS'nin karakteristik denklemi (p + ω 0) n - burada ω 0, n - çoklu kökün modülüdür;
- Butterworth, ACS'nin çeşitli mertebelerdeki karakteristik denklemleri şu şekilde olduğunda 
Sistem her koordinat için modal kontrol kullandığında bu ayarların kullanılması tavsiye edilir.
© V.N. Bakaev, Vologda 2004. Elektronik versiyonun geliştirilmesi: M.A. Gladyshev, I.A. Çuranov.
Vologda Devlet Teknik Üniversitesi.
| Geçiş sürecinin inşası |
Geçici süreçleri oluşturmak için üç yöntem grubu vardır: analitik; frekans ve geçiş karakteristiklerini kullanan grafik; bilgisayar yardımıyla geçici süreçlerin oluşturulması. En karmaşık durumlarda, ACS'yi modellemeye ek olarak, gerçek bir sistemin ayrı parçalarını makineye bağlamaya izin veren bilgisayarlar kullanılır, yani. deneysel yönteme yakındır. İlk iki grup, esas olarak basit sistemler durumunda ve ayrıca sistemin önemli ölçüde basitleştirilmesi ile ön araştırma aşamasında kullanılır.
Analitik yöntemler, sistemin diferansiyel denklemlerini çözmeye veya sistemin transfer fonksiyonunun ters Laplace dönüşümünü belirlemeye dayanır.
Geçici süreçlerin frekans özelliklerine göre hesaplanması, otomatik kontrol sisteminin en baştan analizi frekans yöntemleriyle yapıldığında kullanılır. Mühendislik uygulamasında, otomatik kontrol sistemlerinde kalite göstergelerini değerlendirmek ve geçici süreçleri oluşturmak için V.V. Solodovnikov tarafından geliştirilen yamuk frekans özellikleri yöntemi yaygınlaştı.
Tek bir ana eylemin sistem üzerinde hareket etmesi durumunda, yani; g(t)=1(t) ve başlangıç koşulları sıfır ise, bu durumda geçici bir yanıt olan sistemin yanıtı şu şekilde tanımlanabilir:
 (6.3)
(6.3)
 (6.4)
(6.4)
burada P(ω), kapalı sistemin gerçek frekans yanıtıdır; Q(ω) - kapalı bir sistemin hayali frekans yanıtı, yani Ф g (jω)=P(ω)+jQ(ω).
Yapım yöntemi, oluşturulmuş gerçek karakteristik P(ω)'yi bir dizi yamuğa bölmekten, yaklaşık olarak eğri çizgileri düz parçalarla değiştirmekten oluşur, böylece yamukların tüm ordinatlarını toplarken, orijinal karakteristik Şekil 6.10 elde edilir.

Şekil 6.10. Kapalı bir sistemin gerçek özelliği
burada: ω рi ve ω срi - sırasıyla, her yamuğun tekdüze iletim frekansı ve kesme frekansı.
Daha sonra, her yamuk için eğim katsayısı ω рi /ω срi belirlenir ve h-fonksiyonları tablosuna göre, her yamuktan hi geçiş süreçleri oluşturulur. h-fonksiyonları tablosu boyutsuz zamanı τ verir. Gerçek zamanlı t i'yi elde etmek için, τ'yi verilen yamuğun kesme frekansına bölmek gerekir. Her yamuk için geçiş süreci Pi (0) kat artırılmalıdır, çünkü h-fonksiyonları tablosunda, birim yamuklardan geçici süreçler verilmiştir. ACS geçici süreci, tüm yamuklardan oluşturulmuş hi süreçlerinin cebirsel toplamı ile elde edilir.
© V.N. Bakaev, Vologda 2004. Elektronik versiyonun geliştirilmesi: M.A. Gladyshev, I.A. Çuranov.
Vologda Devlet Teknik Üniversitesi.
Uzaktan ve Mektupla Eğitim Dairesi Başkanlığı
| 6 numaralı konuyla ilgili sorular |
1. Yönetim sürecinin kalitesinin iyileştirilmesi ile ne kastedilmektedir ve bu nasıl başarılmaktadır?
2. Doğrusal standart kontrol yasasını adlandırın.
3. Bize tipik kontrol yasalarından ve tipik düzenleyicilerden bahsedin.
4. Düzeltici cihazların amacı nedir? Dahil edilme yollarını ve özelliklerini belirtin.
5. Sistem sentezi probleminin formülasyonunu açıklar.
6. Sistem sentezinin aşamalarını sıralar.
7. Tasarlanan sistemin istenilen LAH yapısını açıklar.
8. Açık çevrim olarak tasarlanmış bir sistemin transfer fonksiyonu nasıl oluşur?
9. Düzeltici cihazların transfer fonksiyonları nasıl belirlenir?
10. Paralel ve seri düzeltme cihazlarının avantajları ve dezavantajları nelerdir?
11. "Kapanış" nomogramları nasıl kullanılır?
12. Geçici olayları oluşturma yöntemlerini listeleyin.
13. Geçici sürecin kararlı değeri gerçek bir karakteristik ile nasıl belirlenir?
14.İstenilen l.a.h nasıl değiştirilir? sürdürülebilirlik marjlarını artırmak için?
© V.N. Bakaev, Vologda 2004. Elektronik versiyonun geliştirilmesi: M.A. Gladyshev, I.A. Çuranov.
Vologda Devlet Teknik Üniversitesi.
Uzaktan ve Mektupla Eğitim Dairesi Başkanlığı
Konu #7: Doğrusal Olmayan ACS
| giriiş |
Gerçek cihazların özelliklerinin çoğu genellikle doğrusal değildir ve bazıları doğrusallaştırılamaz, çünkü ikinci türden süreksizliklere sahiptir ve parçalı lineer yaklaşım bunlara uygulanamaz. Gerçek bağlantıların (cihazların) çalışmasına doygunluk, histerezis, geri tepme, ölü bölgenin varlığı vb. gibi olaylar eşlik edebilir. Doğrusal olmama durumları doğal ve yapay olabilir (kasıtlı olarak ortaya konmuştur). Fiziksel süreçlerin ve bireysel cihazların özelliklerinin doğrusal olmayan tezahürü nedeniyle sistemlerin doğal doğrusal olmama durumları vardır. Örneğin, bir asenkron motorun mekanik karakteristiği. Gerekli iş kalitesini sağlamak için geliştiriciler tarafından sistemlere yapay doğrusal olmayanlar sokulur: performans açısından en uygun sistemler, arama ve arama dışı uç sistemlerde doğrusal olmayan yasaların varlığı, değişken yapıya sahip sistemler için röle kontrolü kullanılır. vesaire.
Doğrusal olmayan sistem bir bütün olarak kontrol sisteminin temel özelliklerini kaybetmeden doğrusallaştırılması imkansız olan en az bir eleman içeren böyle bir sistem denir. Doğrusal olmamanın temel özellikleri şunlardır: bazı koordinatlar veya bunların zaman türevleri denkleme birinciden farklı çarpımlar veya dereceler şeklinde giriyorsa; denklemin katsayıları bazı koordinatların veya bunların türevlerinin fonksiyonları ise. Doğrusal olmayan sistemler için diferansiyel denklemler derlenirken, önce sistemdeki her cihaz için diferansiyel denklemler derlenir. Bu durumda lineerleştirmeye izin veren cihazların karakteristikleri lineerleştirilir. Lineerleşmeye izin vermeyen elemanlara denir. esasen doğrusal olmayan. Sonuç, bir veya daha fazla denklemin doğrusal olmadığı bir diferansiyel denklem sistemidir. Lineerleştirilebilen cihazlar sistemin lineer kısmını, lineerleştirilemeyen cihazlar lineer olmayan kısmını oluşturur. En basit durumda, doğrusal olmayan bir sistemin ACS'sinin blok diyagramı, ataletsiz doğrusal olmayan bir elemanın ve geri besleme ile kapsanan doğrusal bir parçanın seri bağlantısıdır (Şekil 7.1). Süperpozisyon ilkesi doğrusal olmayan sistemler için geçerli olmadığından, doğrusal olmayan sistemlerin yapısal dönüşümlerini gerçekleştirirken, doğrusal sistemlerin yapısal dönüşümlerine kıyasla tek sınırlama, doğrusal olmayan elemanların doğrusal olanlardan ve tersinin aktarılmasının imkansız olmasıdır.

Pirinç. 7.1. Doğrusal olmayan bir sistemin işlevsel diyagramı:
NE - doğrusal olmayan eleman; LCH - doğrusal kısım; Z(t) ve X(t)
sırasıyla doğrusal olmayan elemanın çıktısı ve girişi.
Doğrusal olmayan bağlantıların sınıflandırılması çeşitli kriterlere göre mümkündür. En yaygın sınıflandırma, statik ve dinamik özelliklere dayanmaktadır. İlki, doğrusal olmayan statik özellikler biçiminde ve ikincisi - doğrusal olmayan diferansiyel denklemler biçiminde sunulur. Bu tür özelliklerin örnekleri içinde verilmiştir. Şekil 7.2'de. tek değerli (belleksiz) ve çok değerli (bellekli) doğrusal olmayan karakteristiklere örnekler verilir. Bu durumda sinyal hızının girişteki yönü (işareti) dikkate alınır.

Şekil 7.2. Doğrusal olmayan elemanların statik özellikleri
Doğrusal olmayan sistemlerin önemli doğrusal olmama durumlarının varlığındaki davranışı, doğrusal ACS'nin davranışından farklı bir dizi özelliğe sahiptir:
1.
doğrusal olmayan sistemin çıkış değeri, giriş eylemiyle orantısızdır, yani doğrusal olmayan bağlantıların parametreleri giriş eyleminin büyüklüğüne bağlıdır;
2.
doğrusal olmayan sistemlerde geçici süreçler başlangıç koşullarına (sapmalar) bağlıdır. Bu bağlamda, doğrusal olmayan sistemler için "küçükte", "büyükte", "bir bütün olarak" kararlılık kavramları tanıtılmaktadır. Küçük (sonsuz küçük) ilk sapmalar için kararlıysa, sistem "küçükte" kararlıdır. Sistem, büyük (sonlu büyüklükte) ilk sapmalar için kararlıysa, "büyük ölçüde" kararlıdır. Herhangi bir büyük (büyüklük olarak sınırsız) ilk sapmalar için kararlıysa, sistem "bir bütün olarak" kararlıdır. Şekil 7.3, sistemlerin faz yörüngelerini göstermektedir: "bir bütün olarak" kararlı (a) ve "büyük" olarak kararlı ve "küçük" olarak kararsız sistemler (b);

Şekil 7.3. Doğrusal olmayan sistemlerin faz yörüngeleri
3.
doğrusal olmayan sistemler, periyodik dış etkilerin olmadığı sistemlerde meydana gelen, sabit genlik ve frekansa (kendi kendine salınımlar) sahip sönümsüz periyodik salınım modu ile karakterize edilir;
4.
doğrusal olmayan sistemlerde geçici sürecin sönümlü salınımları ile salınım periyodunda bir değişiklik mümkündür.
Bu özellikler, doğrusal olmayan sistemlerin analizinde ve sentezinde ortak yaklaşımların bulunmamasına yol açmıştır. Geliştirilen yöntemler, yalnızca yerel doğrusal olmayan problemlerin çözülmesine izin verir. Doğrusal olmayan sistemleri incelemek için tüm mühendislik yöntemleri iki ana gruba ayrılır: kesin ve yaklaşık. Kesin yöntemler arasında A.M. Lyapunov yöntemi, faz düzlemi yöntemi, nokta dönüşümleri yöntemi, V.M. Popov'un frekans yöntemi yer alır. Yaklaşık yöntemler, harmonik veya istatistiksel doğrusallaştırma kullanılarak sistemin doğrusal olmayan denklemlerinin doğrusallaştırılmasına dayanır. Bunun veya bu yöntemin uygulanabilirlik sınırları aşağıda tartışılacaktır. Öngörülebilir gelecekte, doğrusal olmayan sistemlerin teori ve pratiğinin daha da geliştirilmesine ihtiyaç duyulacağına dikkat edilmelidir.
Doğrusal olmayan sistemleri incelemek için güçlü ve etkili bir yöntem, araç takımı bilgisayar olan simülasyondur. Günümüzde analitik çözümü zor olan birçok teorik ve pratik problem, bilgisayar teknolojisi yardımıyla nispeten kolaylıkla çözülebilmektedir.
Doğrusal olmayan ACS'nin çalışmasını karakterize eden ana parametreler şunlardır:
1.
Kendi kendine salınımların varlığı veya yokluğu. Kendi kendine salınımlar varsa, genliklerini ve frekanslarını belirlemek gerekir.
2.
Kontrol edilen parametrenin stabilizasyon moduna (hız) girme süresi.
3.
Kayan modun varlığı veya yokluğu.
4.
Özel noktaların ve özel hareket yollarının tanımı.
Bu, doğrusal olmayan sistemlerin çalışmasına eşlik eden incelenmekte olan parametrelerin tam bir listesi değildir. Değişken parametrelere sahip aşırı, kendi kendini ayarlayan sistemler, değerlendirme ve ek özellikler gerektirir.
© V.N. Bakaev, Vologda 2004. Elektronik versiyonun geliştirilmesi: M.A. Gladyshev, I.A. Çuranov.
Vologda Devlet Teknik Üniversitesi.
Uzaktan ve Yazışmalı Eğitim Dairesi Başkanlığı.
Harmonik doğrusallaştırma yöntemi fikri N.M.'ye aittir. Krylov ve N.N. Bogolyubov ve sistemin doğrusal olmayan bir elemanının, parametreleri doğrusal olmayan elemanın çıkışındaki ilk harmoniklerin genliklerinin eşitliği koşulundan harmonik giriş eylemi altında belirlenen doğrusal bir bağlantı ile değiştirilmesine dayanır ve eşdeğeri doğrusal bağlantı. Yöntem yaklaşıktır ve yalnızca sistemin lineer kısmı bir alçak geçiren filtre olduğunda kullanılabilir, örn. ilk harmonik hariç, doğrusal olmayan elemanın çıkışında ortaya çıkan tüm harmonik bileşenleri filtreler. Bu durumda, lineer kısım herhangi bir dereceden bir diferansiyel denklem ile tanımlanabilir ve lineer olmayan eleman ya tek değerli ya da çok değerli olabilir.
Harmonik doğrusallaştırma yöntemi (harmonik denge), doğrusal olmayan bir elemanın girişine ω frekansı ve A genliği olan bir harmonik etkinin uygulandığı varsayımına dayanır, yani x = A sinωt. Lineer kısmın alçak geçiren bir filtre olduğunu varsayarsak, lineer kısmın çıkış sinyalinin spektrumu sadece Fourier serisi tarafından belirlenen ilk harmonik ile sınırlıdır (daha yüksek harmonikler dikkate alınmadığı için bu, yöntemin yaklaşık değeridir). ). Ardından, çıkış sinyalinin ilk harmoniği ile doğrusal olmayan elemanın giriş harmoniği etkisi arasındaki ilişki, bir transfer fonksiyonu olarak temsil edilir:
![]() (7.1)
(7.1)
Denklem (7.1), harmonik doğrusallaştırma denklemi olarak adlandırılır ve q ve q "katsayıları, giriş eyleminin A genliğine ve ω frekansına bağlı olarak harmonik doğrusallaştırma katsayılarıdır. Çeşitli doğrusal olmayan özellik türleri için, harmonik doğrusallaştırma katsayıları: Tabloda özetlenmiştir Statik tek değerli katsayılar için q "(A) \u003d 0 olduğuna dikkat edilmelidir. Denklem (7.1)'i sıfır başlangıç koşulları altında Laplace dönüşümüne tabi tutarak, ardından p operatörünü jω (p = jω) ile değiştirerek, doğrusal olmayan elemanın eşdeğer karmaşık transfer katsayısını elde ederiz.
Wne (jω,A) = q + jq". (7.2)
Harmonik doğrusallaştırma gerçekleştirildikten sonra, doğrusal olmayan ACS'nin analizi ve sentezi için, çeşitli kararlılık kriterlerinin kullanımı da dahil olmak üzere doğrusal sistemleri incelemek için kullanılan tüm yöntemleri kullanmak mümkündür. Harmonik doğrusallaştırma yöntemine dayalı doğrusal olmayan sistemlerin incelenmesinde, öncelikle periyodik (kendi kendine salınımlı) modların varlığı ve kararlılığı sorunu çözülür. Periyodik rejim kararlıysa, sistemde ω 0 frekansı ve A 0 genliği ile kendi kendine salınımlar vardır. Transfer fonksiyonuna sahip doğrusal bir parça içeren doğrusal olmayan bir sistem düşünün.
 (7.3)
(7.3)
ve eşdeğer bir karmaşık kazanca (7.2) sahip doğrusal olmayan bir eleman. Doğrusal olmayan bir sistemin tasarım yapısal diyagramı, Şekil 7.5'in şeklini alır.

Şekil 7.5. Doğrusal olmayan bir ACS'nin yapısal diyagramı
Doğrusal olmayan bir sistemde kendi kendine salınım olasılığını harmonik doğrusallaştırma yöntemini kullanarak değerlendirmek için, doğrusal sistemlerin kararlılık analizinde yapıldığı gibi kararlılık sınırı için koşulları bulmak gerekir. Doğrusal kısım, transfer fonksiyonu (7.3) ve doğrusal olmayan eleman (7.2) tarafından tanımlanırsa, kapalı sistemin karakteristik denklemi şu şekilde olacaktır:
d(p) + k(p)(q(ω,A) + q"(ω,A)) = 0 (7.4)
Mihaylov kararlılık kriterine göre, kararlılık sınırı, Mihaylov hodografının orijinden geçişi olacaktır. İfadelerden (7.4), kendi kendine salınımların genliğinin ve frekansının sistem parametrelerine, örneğin sistemin doğrusal kısmının transfer katsayısı k'ye bağımlılığı bulunabilir. Bunu yapmak için, (7.4) denklemlerinde transfer katsayısı k bir değişken olarak düşünülmelidir, yani; bu denklemi şu şekilde yazın:
d(jω) + K(jω)(q(ω,A) + q"(ω,A)) = Re(ω 0 ,A 0 ,K) + Jm(ω 0 ,A 0 ,k) = 0 (7.5)
nerede ω o ve A o - kendi kendine salınımların olası frekansı ve genliği.
Daha sonra, denklemin gerçek ve sanal kısımlarını sıfıra eşitleyerek (7.5)
 (7.6)
(7.6)
Öğelerinin ve parametrelerinin seçimi ve hesaplanması için kontrol sisteminin blok şemasının iyileştirilmesi. Sistemin veya tek tek parçalarının laboratuvarda deneysel olarak incelenmesi ve şemasında ve tasarımında uygun düzeltmelerin yapılması. Kontrol sisteminin tasarımı ve imalatı. Gerçek çalışma koşullarında deneme işletiminde sistemin ayarlanması.
Çalışmayı sosyal ağlarda paylaşın
Bu çalışma size uymuyorsa, sayfanın alt kısmında benzer çalışmaların bir listesi bulunmaktadır. Arama butonunu da kullanabilirsiniz
Ders #6 Otomatik kontrol sistemlerinin sentezi
ACS'NİN SENTEZİ ACS'nin yapısının ve parametrelerinin seçimi, başlangıç koşulları ve gerekli kalite göstergeleri ve çalışma koşullarına göre giriş eylemleri.
ACS tasarımı aşağıdaki adımları içerir:
- Düzenleme nesnesinin incelenmesi: matematiksel bir model oluşturmak, nesnenin parametrelerini, özelliklerini ve çalışma koşullarını belirlemek.
- ATS için gerekliliklerin formülasyonu.
- Kontrol ilkesi seçimi; işlevsel yapının belirlenmesi (teknik sentez).
- Statik, dinamik, enerji, operasyonel ve diğer gereksinimleri ve bunların statik ve enerji özellikleri açısından kendi aralarında koordinasyonunu dikkate alarak kontrol şemasının öğelerinin seçimi (prosedür resmileştirilmemiştir - mühendislik yaratıcılığı).
- Algoritmik yapının tanımı (teorik sentez), matematiksel yöntemler kullanılarak ve açık bir matematiksel biçimde yazılmış gereksinimler temelinde gerçekleştirilir. Yönetmelik yasalarının belirlenmesi ve belirtilen gereksinimleri sağlayan düzeltici cihazların hesaplanması.
- Kontrol sisteminin blok şemasının iyileştirilmesi, elemanlarının ve parametrelerinin seçimi ve hesaplanması.
- Sistemin (veya ayrı parçalarının) laboratuvarda deneysel olarak incelenmesi ve şemasında ve tasarımında uygun düzeltmelerin yapılması.
- Kontrol sisteminin tasarımı ve imalatı.
- Sistemin gerçek çalışma koşullarında ayarlanması (deneme işletimi).
ACS'nin tasarımı, kontrol nesnesinin seçimi ile başlar ve ana fonksiyonel elemanlar (amplifikatörler, aktüatörler vb.), yani sistemin güç kısmı geliştirilir.
Sistemin belirtilen statik ve dinamik özellikleri, güç ünitesinin yapısının ve parametrelerinin, özel düzeltici cihazların ve bir bütün olarak tüm ACS'nin uygun seçimi ile sağlanır.
Düzeltici cihazların amacı: sistemin gerekli doğruluğunu sağlamak ve geçici sürecin kabul edilebilir bir doğasını elde etmek.
Düzeltici bağlantılar sisteme çeşitli şekillerde dahil edilir: seri, yerel çevre koruma, doğrudan paralel bağlantı, harici (kontrol döngüsünün dışında) dengeleme cihazları, çevre korumayı dengeleyen tüm ACS'nin kapsamı, tek olmayan ana geri bildirim.
DC elektrik düzeltici cihaz türleri: aktif ve pasif DC dört kutuplular, farklılaştırıcı transformatörler, DC takojeneratörler, takometrik köprüler, vb.
Randevu ile düzeltici cihazlar sınıflandırılır:
- DENGELEME ACS'nin kararlılığını sağlar ve statik ve dinamik özelliklerini geliştirir;
- TELAFİ, kombine prensibe göre ACS oluştururken statik ve dinamik hataları azaltır;
- FİLTRELEME Sistemlerin gürültü bağışıklığının iyileştirilmesi, örneğin, doğrudan kanal sinyalinin demodülasyonu sırasında daha yüksek harmoniklerin filtrelenmesi;
- Sisteme, sistemin kalitesini artıran özel özellikler vermek için UZMANLAŞTIRILMIŞTIR.
ACS, aşağıdaki blok şemalara göre oluşturulabilir:
- Seri düzeltme devresi ile.
Yükseltici Y, düzeltici devrenin çıkışını şöntlememek için büyük bir giriş empedansına sahip olmalıdır.
Yavaş değişen giriş eylemleri durumunda kullanılır, çünkü büyük uyumsuzluklarda gerçek doğrusal olmayan elemanlarda doyma meydana gelir, kesme frekansı sola gider ve sistem yavaşça doyma durumundan çıkar.
Şekil 1.
Ardışık düzeltme genellikle stabilizasyon sistemlerinde veya düzeltici geri beslemeli kontur düzeltme için kullanılır.
azalır.

- Bir anti-paralel düzeltici devre ile.

İncir. 2.
Girişe fark olarak girer ve derin doygunluk oluşmaz.
- Seri-paralel düzeltici devre ile.

Şek. 3.
- Birleşik düzeltici devrelerle.
ACS'nin iki veya daha fazla döngü ile ikincil kontrolün sentezi, iç döngüden başlayarak döngülerin art arda optimizasyonu ile gerçekleştirilir.
Sistemlerin hesaplanması 2 aşamaya ayrılmıştır: statik ve dinamik.
statik hesaplamaana devresinde yer alan sistemin ana bağlantılarının seçilmesi, ikincisinin bir blok diyagramının çizilmesi ve sistemin ana elemanlarının parametrelerinin belirlenmesinden oluşur (gerekli doğruluğu sağlayan kazanç faktörleri, tüm elemanların zaman sabitleri, dişliler). oranlar, bireysel bağlantıların transfer fonksiyonları, motor gücü). Buna ek olarak, manyetik ve yarı iletken yükselteçlerin hesaplanması ve tasarımı ile transistör veya tristör dönüştürücülerin, motorların, algılama elemanlarının ve sistemlerin diğer yardımcı cihazlarının seçiminin yanı sıra kararlı durum çalışmasında doğruluk ve hassasiyetin hesaplanması da buna dahildir. sistemin.
Dinamik hesaplamageçici sürecin kararlılığı ve kalitesi (sistemin hızı, performans özellikleri ve dinamik doğruluğu) ile ilgili çok çeşitli konuları içerir. Hesaplama sürecinde düzeltici devreler seçilir, dahil edildikleri yerler ve ikincisinin parametreleri belirlenir. Elde edilen niteliksel göstergeleri iyileştirmek ve bazı doğrusal olmama durumlarını hesaba katmak için geçici süreç eğrisi de hesaplanır veya sistem modellenir.
Dengeleyici algoritmaların üzerine inşa edildiği platformlar:
- Klasik (diferansiyel denklemler - zaman ve frekans yöntemleri);
- Bulanık mantık;
- Nöral ağlar;
- Genetik ve karınca kolonisi algoritmaları.
Regülatör sentez yöntemleri:
- Klasik şema;
- PID denetleyicileri;
- Direk yerleştirme yöntemi;
- LCH yöntemi;
- Birleşik yönetim;
- Çok sayıda dengeleyici kontrol.
Klasik Regülatör Sentezi
Nesne kontrolünün klasik blok diyagramı şekil 2'de gösterilmiştir. 1. Genellikle regülatör nesnenin önünde açılır.

Pirinç. 1. Nesne kontrolünün klasik blok diyagramı
Kontrol sisteminin görevi, dış parazitlerin etkisini bastırmak ve yüksek kaliteli geçişler sağlamaktır. Bu görevler genellikle çelişkilidir. Aslında, ana eylem ve pertürbasyon kanalı için gerekli transfer fonksiyonlarına sahip olacak şekilde sistemi stabilize etmemiz gerekir:
, .
Bunu yapmak için sadece bir regülatör kullanabiliriz, bu nedenle böyle bir sisteme tek serbestlik dereceli sistem denir.
Bu iki transfer fonksiyonu eşitlikle ilişkilidir.
Dolayısıyla transfer fonksiyonlarından birini değiştirerek ikincisini de otomatik olarak değiştirmiş oluyoruz. Bu nedenle, bağımsız olarak oluşturulamazlar ve çözüm her zaman bir tür uzlaşma olacaktır.
Bakalım böyle bir sistemde sıfır hata, yani giriş sinyalinin kesinlikle doğru takibi sağlanabilecek mi? Transfer fonksiyonu yanlışlıkla şuna eşittir:
hata yapmak Her zaman sıfır ise bu transfer fonksiyonunun sıfır olması gerekir. Payı sıfır olmadığı için, paydanın sonsuza gitmesi gerektiğini hemen anlarız. Sadece düzenleyiciyi etkileyebiliriz, bu yüzden alırız. Böylece,hatayı azaltmak için
denetleyicinin kazancını artırın.
Ancak, kazancı süresiz olarak artıramazsınız. İlk olarak, tüm gerçek cihazların giriş ve çıkış sinyalleri için izin verilen maksimum değerleri vardır. İkincisi, devrenin büyük bir amplifikasyonu ile geçici süreçlerin kalitesi bozulur, bozulmaların ve gürültünün etkisi artar, sistem kararlılığını kaybedebilir. Bu nedenle, bir serbestlik derecesine sahip bir devrede sıfır izleme hatası sağlamak imkansızdır.
Soruna frekans özellikleri açısından bakalım. Bir yandan, ana sinyalin yüksek kaliteli takibi için, frekans yanıtının yaklaşık olarak 1'e eşit olması istenir (bu durumda). Öte yandan, sağlam kararlılık açısından simülasyon hatasının büyük olduğu yüksek frekanslarda sağlanması gerekmektedir. Ayrıca pertürbasyon transfer fonksiyonu bu pertürbasyonları bastıracak şekilde olmalı, ideal olarak sağlamalıyız.
Bir uzlaşma çözümü seçerken, genellikle aşağıdakileri yapın:
● düşük frekanslar, düşük frekanslı sinyallerin iyi bir şekilde izlenmesini sağlayan koşulun yerine getirilmesini sağlar; bu durumda, yani düşük frekanslı parazitler bastırılır;
● yüksek sağlam stabilite ve ölçüm gürültüsünün bastırılmasını sağlamak için frekanslar aranır; bu durumda yani sistem aslında açık devre olarak çalışmakta, regülatör yüksek frekanslı parazitlere tepki vermemektedir.
Belirli bir doğruluk için doğrusal sürekli otomatik kontrol sistemlerinin hesaplanması
sabit durumda
ACS'nin karşılaması gereken ana gereksinimlerden biri, sabit çalışma durumunda ana (kontrol) sinyalinin yeniden üretiminin gerekli doğruluğunu sağlamaktır.
Statizm sırası ve sistemin transfer katsayısı, kararlı durumdaki doğruluk gerekliliklerine göre bulunur.Gerekli düşüş değeri ve kalite faktörü (astatik ACS durumunda) tarafından belirlenen sistemin transfer katsayısı, sistemin basit stabilizasyonunu bile önemli ölçüde karmaşıklaştıracak kadar büyük çıkarsa, arttırılması tavsiye edilir. ve böylece sistem transfer katsayısının değerinden bağımsız olarak verilen sabit durum hatasını sıfıra indirir. Sonuç olarak, yalnızca geçici süreçlerin kararlılığı ve kalitesine dayalı olarak bu katsayı değerini seçmek mümkün hale gelir.
ACS'nin yapısal diyagramının forma indirgenmesine izin verin

Daha sonra, ACS'nin yarı kararlı çalışma modunda, uyumsuzluk yakınsak bir seri olarak temsil edilebilir.
burada ağırlık sabitlerinin rolünü oynarlar.
Açıkçası, böyle bir süreç ancak yavaş değişen ve yeterince düzgün bir fonksiyonsa gerçekleşebilir.
Açık çevrim bir sistemin transfer fonksiyonunu şu şekilde gösterirsek;
o zaman r = 0 için
r = 1 için
r =2 için
r =3 için
Logaritmik genlik frekans özelliklerinin düşük frekans kısmı, kararlı durumda yavaş değişen kontrol sinyallerini işlerken sistemin doğruluğunu belirler ve hata oranları ile belirlenir. Hata oranlarının artık ACS'nin doğruluğu üzerinde önemli bir etkisi yoktur ve pratik hesaplamalarda göz ardı edilebilirler.
1. Verilen uyuşmazlık katsayılarına (hatalar) göre ACS'nin sabit durum çalışmasının hesaplanması
Kararlı durumda sistem çalışmasının doğruluğu, sistem doğruluğu için gereksinimleri belirleme biçimine bağlı olarak belirlenen açık sistemin transfer katsayısının değeri ile belirlenir.
Hesaplama şu şekilde yapılır.
- STATİK AT. Burada, belirlendiği konumsal hata katsayısının değeri belirlenir: .
dB
20 lgk bilgisayar
ω , s -1
- 1. dereceden İSTATİSTİK SİSTEMLER.
Bu durumda, belirleyen katsayı verilir.
Katsayılar ve verilirse, o zaman -20 dB/dec eğimli açık bir sistemin düşük frekanslı LAFC asimptotunun konumunu belirleyen ve ikinci asimptotun köşede -40 dB/dec eğimli olduğu frekans (Şek. 1).

Şekil 1.
- 2. dereceden STATİK SİSTEMLER.
Belirli bir katsayı ile belirleriz kpc:
dB
ω , s -1
2. Sistemin uyumsuzluğunun (hatasının) verilen maksimum değerine göre ACS'nin sabit durum çalışma modunun hesaplanması
Kararlı durum hatasının izin verilen değerine ve kontrol eyleminin türüne bağlı olarak, sistemin LAF'sinin düşük frekanslı kısmının parametreleri seçilir.
- Genlik ve frekans ile harmonik eylem altında kabul edilebilir maksimum hata ve sistem atatizminin sırası verilsin.
Daha sonra sistemin düşük frekanslı LAFC asimptotu, aşağıdaki koordinatlarla kontrol noktasından daha aşağı geçmemelidir:
(1)
ve -20 eğime sahip R dB/dec. Bağımlılık (1) de geçerlidir.
- Girdi eyleminin maksimum hız ve maksimum ivmesinde kabul edilebilir maksimum hata ve astatizm sırası verilsin r sistemleri.
Ya.E. tarafından önerilen eşdeğer sinüzoidal eylem yöntemini kullanmak genellikle uygundur. Gukailo.
Bu durumda, hız ve ivme genliklerinin belirtilen maksimum değerlere eşit olduğu bir mod belirlenir. Girdi eyleminin verilen yasaya göre değişmesine izin verin
. (2)
İfadenin (2) farklılaştırılmasıyla elde edilen hız ve ivme genlik değerlerinin verilen değerlere eşitlenmesi ve elde edilmesi
Neresi, . Bu değerler bir kontrol oluşturmak için kullanılabilir
koordinatları ile B noktası ve
Tek bir olumsuz geri bildirim ile,
Tek olmayan geri bildirim ile.
Giriş sinyali hızı maksimumdaysa ve ivme azalıyorsa, kontrol noktası frekans aralığı üzerinde -20 dB/dec eğimle düz bir çizgide hareket edecektir. İvme maksimum değere eşitse ve hız düşerse, kontrol noktası frekans aralığında -40dB/dec eğimle düz bir çizgide hareket eder.
Kontrol noktası B'nin altındaki alan ve -20dB/dek ve -40dB/dek eğimli iki düz çizgi, LAFC izleme sistemi için yasak bölgedir. Kesin LAFR, iki asimptotun kesişme noktasının 3 dB altında olduğundan, istenen karakteristik de bu miktar kadar yükseltilmelidir, yani.
Bu durumda kalite faktörünün hız cinsinden gerekli değeri ve ikinci asimptotun frekans ekseni ile kesişme noktasındaki frekansı (Şekil 2)
Kontrol eyleminin yalnızca maksimum hız ile karakterize edilmesi durumunda, belirli bir hata değerindeki hız açısından sistemin kalite faktörü:
Yalnızca maksimum sinyal ivmesi ve hata değeri belirtilirse, hızlanma kalite faktörü şu şekilde olur:

İncir. 2.
- Kontrol kanalı için maksimum statik hata verilsin (giriş eylemi adım adımdır, sistem kontrol kanalı için statiktir).

Şek. 3.
Daha sonra değer ifadeden belirlenir. Otomatik bir sistemin statik doğruluğu aşağıdaki denklemden belirlenebilir:
kapalı sistemin statik doğruluğu nerede,
açık bir sistemde kontrol edilen değerin sapması,
belirtilen doğruluğu sağlamak için gereken açık döngü transfer katsayısı.
- Pertürbasyon kanalı boyunca izin verilen maksimum statik hata verilsin (tedirginlik eylemi adım adımdır, sistem pertürbasyon kanalı boyunca statiktir, Şekil 3).
Ardından değer şu ifadeden belirlenir:
pertürbasyon kanalı boyunca açık bir sistemin transfer katsayısı nerede,
regülatör olmadan sistem hatası.
Statik kontrol sistemlerinde, sürekli bir rahatsız edici eylemin neden olduğu sabit durum hatası, açık çevrim bir sisteme kıyasla 1+ azalır. Bu durumda kapalı sistemin transfer katsayısı da 1+ kat azalır.
- Kontrol eyleminden kabul edilebilir hız hatasının verilmesine izin verin (giriş eylemi sabit bir hızda değişir, sistem birinci dereceden statiktir).
Takip sistemleri genellikle birinci dereceden statik olarak tasarlanır. Değişken bir kontrol eylemiyle çalışırlar. Kararlı durumdaki bu tür sistemler için en karakteristik özellik, doğrusal bir yasaya göre girdi eylemindeki değişikliktir.
Daha sonra sistemin hız açısından kalite faktörü aşağıdaki ifadeden belirlenir:
Kararlı durum hatası, LFR'nin düşük frekanslı kısmı tarafından belirlendiğinden, istenen LFR'nin düşük frekanslı asimptotu transfer katsayısının hesaplanan değerinden oluşturulabilir.
3. Tek olmayan geri beslemeli bir sistemin izin verilen maksimum hatası için otomatik kontrol sisteminin kararlı durum çalışma modunun hesaplanması
Giriş sinyaliyle ilgili önsel bilgilerin minimuma indirgenmesine izin verin:
- Giriş eyleminin birinci türevinin maksimum modulo değeri (maksimum izleme hızı);
- Giriş eyleminin ikinci türevinin maksimum modulo değeri (maksimum izleme ivmesi);
- Giriş eylemi, herhangi bir spektral yoğunluğa sahip deterministik veya rastgele bir sinyal olabilir.
Kararlı çalışma durumunda yararlı bir sinyal üretirken kontrol sisteminin izin verilen maksimum hatasını değerle sınırlamak gerekir.
Yeniden üretim doğruluğu gereksinimi, gerçek bir giriş sinyaline eşdeğer bir harmonik giriş için en basit şekilde formüle edilir:
genlik ve frekansın verildiğini ve ilk fazın keyfi bir değere sahip olduğunu varsayarsak.
Giriş eyleminin kabul edilebilir yeniden üretim hatası ile sistem parametreleri ve giriş sinyali arasında bir bağlantı kuralım.
Sürekli bir ACS'nin blok diyagramının forma indirgenmesine izin verin (Şekil 4).

Şekil 4.
Zaman alanındaki sistemin çıkışındaki hata şu şekilde verilir:
referans (hatasız) çıkış fonksiyonu nerede.
Hız ve ivme üzerindeki kısıtlamalar nedeniyle gösterilebilir.çıkış fonksiyonu, adım fonksiyonundan farklıdır.
Son ifadeyi Laplace dönüşümlerinin uzayına eşleyelim:
Fourier dönüşümlerinin uzayını eşleyelim:
Düşük frekans bölgesinde (geri besleme devresinin zaman sabitleri), sonra
hatanın maksimum genliği şu ifade ile belirlenir:
Düşük frekanslardaki gerçek sistemlerde, genellikle, çünkü gereklilik yerine getirilmelidir; belirlemek için matematiksel ifadekontrol frekansında () forma dönüştürülür
ve çıktı fonksiyonunun verilenden daha büyük olmayan bir maksimum hata ile yeniden üretilebilmesi için, tasarlanan sistemin LAFC'sinin koordinatlarla kontrol noktasının altına geçmemesi ve
4. Bir statik otomatik kontrol sisteminin kararlı durum çalışmasının sınır geçişleri yöntemiyle hesaplanması
İfade
Statik ACS'nin genelleştirilmiş blok diyagramı verilsin:

burada pay ve payda polinomları bir çarpan içermez P (serbest üyeleri bire eşittir),
regülatör transfer katsayısı,
nesnenin kontrol kanalı üzerinden aktarım katsayısı,
geri bildirim oranı,
pertürbasyon kanalı boyunca nesnenin transfer katsayısı,
ayrıca, ilk yaklaşımda, bağlantıların statik ve dinamik transfer katsayıları eşit alınır, kontrol kanalı boyunca çıkış fonksiyonunun nominal değeri, nominal giriş eylemine karşılık gelir ve adım adım tedirgin edici eylemin ve izin verilen statik değerin olmasına izin verin. pertürbasyon kanalı boyunca hata, çıkış fonksiyonunun nominal değerinin %'si olarak verilir.
Daha sonra sistemin kararlı durumdaki kontrol ve bozucu kanallar boyunca transfer katsayıları, kapalı sistemin statik transfer katsayılarına eşittir ve aşağıdaki formüllerle belirlenir:
(1)
Kontrol ve bozucu kanallar için statik denklemler şu şekildedir:
(2)
Kontrolörün ve geri besleme devresinin transfer katsayıları aşağıdaki ifadelerle belirlenir:
(3)
ACS'nin statik doğruluğunu artırmanın yolları
- Statikte açık çevrim bir sistemin iletim oranını artırma sistemler.

Nerede, .
Ancak, kararlılık koşulları arttıkça kötüleşir, yani dinamiklerdeki hatalar artar.
- Entegre regülatöre giriş.
2.1. I-regülatör uygulaması: .
Bu durumda, sistem kontrol ve pertürbasyon kanalları boyunca astatik hale gelir ve statik hata sıfıra eşit olur. Sistemin LAFC'si orijinalinden çok daha dik olacak ve faz kayması 90 derece artacaktır. Sistem kararsız olabilir.
2.2. PI denetleyicisinin ayarlanması: .
Burada statik hata sıfıra eşittir ve kararlılık koşulları I-denetleyicili bir sistemden daha iyidir.
2.3. PID denetleyicisini kullanarak: .
Sistemin statik hatası sıfırdır ve kararlılık koşulları, PI denetleyicili bir sistemden daha iyidir.
- Giriş sinyalinin bilgi seviyesinin doğru bir şekilde yeniden üretilmesi gerekiyorsa, birim dışı geri bildirim sistemine giriş.
ve statik bağlantılar olduğunu varsayıyoruz. , böyle bir seçim yapmak gereklidir
İle; .
- Giriş ölçeklendirme
darbe.
Burada.
Çıkış fonksiyonu giriş eyleminin bilgi düzeyine eşit olacaktır, eğer, buradan, nerede.
- Kontrol ve bozucu kanallar yoluyla kompanzasyon ilkesinin uygulanması.
Dengeleme cihazlarının hesaplanması, "Kombine kontrol sistemlerinin hesaplanması" bölümünde açıklanmaktadır.
ACS dinamiklerinin hesaplanması
LFC için ACS sentezi
Şu anda, düzeltici cihazların sentezi için aşağıdakilere ayrılan çok sayıda yöntem geliştirilmiştir:
- sistem kalite göstergelerini düzeltici cihazların parametreleriyle ilişkilendiren analitik ifadeleri kullanan analitik sentez yöntemleri;
- grafik-analitik.
Grafik-analitik sentez yöntemlerinden en uygun olanı, logaritmik frekans özelliklerinin klasik evrensel yöntemidir.
Yöntem Özü Şöyleki. İlk olarak, orijinal sistemin asimptotik LAFC'si oluşturulur, ardından açık sistemin istenen LAFC'si oluşturulur; Düzeltici cihazın LAFC'si orijinal sistemin LAFC'sinin şeklini değiştirmelidir, böylece düzeltilmiş sistemin LAFC'si değişir.
Sentezdeki en zor ve kritik adım, istenen LFC'nin oluşturulmasıdır. Oluştururken, sentezlenen sistemin bir birim negatif geri beslemeye sahip olduğu ve minimum fazlı bir sistem olduğu varsayılır. Tek FOS'lu minimum fazlı sistemlerin geçiş fonksiyonunun kalite göstergeleri ile açık bir sistemin LAFC'si arasındaki nicel bir ilişki, Chestnut-Mayer, V.V. Solodovnikov, A.V. Fateev, V.A. Besekersky'nin nomogramları temelinde kurulur.
İstenen LACH şartlı olarak üç kısma ayrılır: düşük frekans, orta frekans ve yüksek frekans. Düşük frekanslı kısım, sistemin statik doğruluğu, ACS'nin kararlı durumda çalışmasının doğruluğu ile belirlenir. Statik bir sistemde, düşük frekanslı asimptot, frekans eksenine paraleldir; astatik sistemlerde, düşük frekanslı asimptotun eğimi 20 * dB/dec, burada - astatizm sırası ( =1, 2, 3,…). Orta frekans kısmı, esas olarak sistemdeki süreçlerin dinamiklerini belirlediği için en önemlisidir. Orta frekans asimptotunun ana parametreleri, eğimi ve kesme frekansıdır. Orta frekans asimptotunun eğimi ne kadar büyük olursa, sistemin iyi dinamik özelliklerini sağlamak o kadar zor olur. Bu nedenle, 20 dB/dec'lik bir eğim makuldür ve nadiren 40 dB/dec'i aşar. Kesme frekansı sistemin hızını belirler. Daha fazla, daha yüksek performans (daha az). İstenen LAFC'nin yüksek frekanslı kısmı, sistemin dinamik özellikleri üzerinde çok az etkiye sahiptir. Genel olarak konuşursak, aktüatörün gerekli gücünü ve yüksek frekanslı gürültünün etkisini azaltan asimptotunun mümkün olan en büyük eğimine sahip olmak daha iyidir.
İstenen LACH, sistem gereksinimleri temelinde oluşturulur: statik özellikler için gereksinimler, astatizm sırası şeklinde verilir. ve açık bir sistemin transfer katsayısı; dinamik özellikler çoğunlukla izin verilen maksimum aşma değeri ve düzenleme süresi tarafından belirlenir; bazen ilk uyumsuzlukta kontrol edilen değişkenin izin verilen maksimum ivmesi şeklinde bir sınır belirlenir.
İstenen LAF'yi inşa etme yöntemleri: V.V. Solodovnikov'a göre inşaat, tipik LAF ve onlar için nomogramların kullanımı, E.A.'ya göre inşaat. Sankovsky G.G. Sigalov, basitleştirilmiş inşaat, V.A.'ya göre inşaat. ve diğer yöntemler.
Frekans yöntemlerinin avantajları:
● Bir nesnenin matematiksel modelini yansıtan frekans özellikleri, deneysel olarak nispeten kolaylıkla elde edilebilir;
● Frekans yanıtı hesaplamaları, basit ve görsel grafik-analitik yapılara indirgenmiştir;
● Frekans yöntemleri, sistemin düzenine, transfer fonksiyonunun aşkın veya irrasyonel bağlantılarının varlığına bakılmaksızın problem çözmede basitliği ve netliği birleştirir.
İstenen LACH sentezi
Teorik ve deneysel çalışmalar, kapalı durumda kararlı olan bir açık çevrim kontrol sisteminin LAFC'sinin frekans eksenini hemen hemen her zaman 20 dB/dec eğimli bir kesitle kestiğini ortaya koymuştur. Frekans eksenini 40 dB/dec veya 60 dB/dec eğimli bir LAFC bölümüyle geçmek mümkündür, ancak nadiren kullanılır, çünkü böyle bir sistem çok düşük bir aktarım katsayısında kararlıdır.
Kapalı durumda kararlı olan açık bir sistemin LAFC'sinin en rasyonel biçiminin eğimleri vardır:
- düşük frekanslı asimptot 0, -20, -40 dB/dec (sistem astatizm sırasına göre belirlenir);
- düşük frekansı orta frekans asimptotlarıyla birleştiren asimptot, 20, -40, -60 dB/dec eğimlere sahip olabilir;
- orta frekans asimptotu 20 dB/ aralık;
- orta frekansı LAFC'nin yüksek frekans kısmına bağlayan asimptot, kural olarak -40 dB/dec'lik bir eğime sahiptir;
- LAFC'nin yüksek frekans bölümü, orijinal açık döngü sisteminin LAFC'sinin yüksek frekans bölümünün asimptotlarına paralel olarak oluşturulmuştur.
İstenen LFC'yi oluştururken, aşağıdaki gereksinimler dikkate alınır:
- Düzeltilen sistem, verilen kalite göstergelerini (sabit durumda kabul edilebilir hata, gerekli kararlılık marjı, hız, aşma ve geçici olayların kalitesinin diğer göstergeleri) karşılamalıdır.
- Stabilizasyon cihazını basitleştirmek için istenen LFC'nin şekli, düzeltilmemiş sistemin LFC'sinden mümkün olduğunca az farklı olmalıdır.
- Yüksek frekanslarda düzeltilmemiş sistemin LAFC'sini 20-25 dB'den fazla geçmemesi için çaba gösterilmelidir.
- İstenen LAFC'nin düşük frekanslı kısmı, düzeltilmemiş sistemin LAFC'si ile eşleşmelidir, çünkü açık çevrim, dinamik olarak düzeltilmemiş bir sistemin transfer katsayısı, sabit durumda gerekli doğruluk dikkate alınarak seçilir.
Sistemin kalitesi için tüm gereksinimler karşılanırsa, istenen LFC'nin yapımı tamamlanmış sayılabilir. Aksi takdirde, sabit durum çalışmasının hesaplanmasına geri dönmeli ve ana devrenin elemanlarının parametrelerini değiştirmelisiniz (farklı güçte veya daha az ataletli bir motor seçin, daha kısa bir zaman sabitine sahip bir amplifikatör kullanın, sert negatif geri beslemeyi açın) sistemin en atalet unsurlarını kapsayan vb.) .
İstenen LFC'yi oluşturmak için algoritma

- Kesme frekansı seçme L f (w).
Geçici sürecin aşma ve zayıflama süresi verilirse, V.V. Solodovnikov veya A.V. Fateev'in nomogramları kullanılır; salınım indeksi M ayarlanmışsa, hesaplama V.A. Besekersky'nin yöntemine göre yapılır.
V.V. tarafından kalite nomogramlarının oluşturulması Solodovnikov, kapalı bir ACS'nin tipik bir gerçek frekans tepkisine dayanmaktadır (Şekil 2). Statik sistemler için ( =0) , astatik sistemler için ( =1, 2,…) .
Bu yöntem, orana uyulduğunu varsayar.
Dinamik kalite göstergeleri ve, kalite diyagramı V.V tarafından kapalı ACS'nin gerçek frekans yanıtının parametreleriyle ilişkilendirilen ilk göstergeler olarak alınır. Solodovnikov (Şek. 3). Eğri kullanılarak belirtilen değere göre (Şekil 3), karşılık gelen değer belirlenir. Daha sonra, eğriye göre, belirtilen değere eşit olan değer belirlenir, elde ettiğimiz, kontrol süresinin belirtilen değeri aşmadığı kesme frekans değeridir.
Öte yandan, kontrollü koordinatın izin verilen ivmesi ile sınırlıdır. İlk uyumsuzluğun nerede olduğu önerilir.
Kontrol süresi, pay katsayısının 2'de, 3'te, 4'te eşit alındığı ampirik bir formül kullanılarak yaklaşık olarak belirlenebilir.
Sistemi olabildiğince hızlı tasarlamak her zaman arzu edilir.
Kural olarak, ½ on yılı geçmez. Bu, düzeltici cihazların karmaşıklığından, güvenilirliği ve gürültü bağışıklığını azaltan farklılaştırıcı bağlantıları sisteme sokma ihtiyacından ve ayrıca ayarlanabilir koordinatın izin verilen maksimum ivmesindeki sınırlamadan kaynaklanmaktadır.
Kesme frekansı ancak artırılarak artırılabilir. Bu durumda, statik doğruluk artar, ancak kararlılık koşulları kötüleşir.
Seçim kararının yeterli gerekçesi olmalıdır.
- Orta frekans asimptotunu oluşturuyoruz.
- Orta frekanslı asimptotu düşük frekanslı asimptot ile birleştiririzböylece fazla fazın olduğu frekans aralığında. Faz fazlalığı ve modül fazlalığı nomogram ile belirlenir (Şekil 4). Eşlenik asimptot, 20, -40 veya 60 dB/dec'lik bir eğime sahiptir. =0 ( - sistemin atatizm sırası); -40, -60 dB/dec =1 ve -60 dB/dec, =2'de.
Faz fazlalığı daha küçük çıkarsa, eşlenik asimptot sola kaydırılmalı veya eğimi azaltılmalıdır. Faz fazlalığı izin verilen değerden büyükse, eşlenik asimptot sağa kaydırılır veya eğimi artırılır.
İlk köşe frekansı ifadeden belirlenir.
- Orta frekanslı asimptotu yüksek frekanslı kısımla birleştiririzböylece faz fazlalığının olduğu frekans aralığında. Köşe frekansı orana göre belirlenir.
Köşe frekansında ise<, то сопрягающую асимптоту смещают вправо или уменьшают ее наклон.
> ise, eşlenik asimptot sola kaydırılır veya eğimi artırılır. Önerilen fark birkaç derece olmalıdır. Köşe asimptotunun sağ köşe frekansı.
Kural olarak, bu asimptotun eğimi -40 dB/dec ve izin verilen farktır. Test hangi sıklıkta gerçekleştirilir.
- Yüksek frekanslı kısım, paralel veya onunla birleştirilmiş olarak tasarlanmıştır.
Karakteristiğin bu kısmı, sistemin düzgünlüğünü etkiler.
Böylece, orta frekans asimptotunun konjuge asimptotlarla konjuge olduğu frekansları oluşturmanın ilk aşamasında koşullardan bulunur. İkinci aşamada, eşlenik frekansların değerleri, faz fazlalıkları dikkate alınarak rafine edilir. Üçüncü aşamada, tüm köşe frekansları, orijinal sistemin köşe frekansına yakınlık durumuna göre, yani bu frekansların birbirinden çok az farklı olması durumunda düzeltilir.
Seri tip düzeltici devrenin sentezi
Şekil 1'deki şemada, düzeltici devrenin parametreleri buradan elde edilebilir:
Logaritmik frekans yanıtlarına geçelim: ,
Yüksek frekanslarda, regülatörün LAFC'si "varsayılan olarak" gürültü korumasının durumuna göre 20 dB'yi geçmemelidir. ACS'nin geri beslemeli yapısal-parametrik optimizasyonunun temel prensibi: kontrolör, kontrol nesnesinin dönüş transfer fonksiyonuna eşit veya ona yakın bir transfer fonksiyonuna sahip dinamik bir bağlantı içermelidir.
Sıralı bir düzeltme devresinin hesaplanmasını örnek olarak ele alalım.
Statik sistemi düzeltmek için gerekli olsun. Kurduğumuzu varsayalım. Sistemin minimum faz bağlantılarına sahip olduğuna inanıyoruz, bu nedenle faz-frekans karakteristiğini oluşturmuyoruz (Şekil 2).
Düzeltici devrenin parametrelerini yeniden oluşturmak artık çok kolay. En sık kullanılan aktif düzeltici cihazlar ve pasif RC -zincirler. Fiziksel kavramlara dayanarak, Şekil 1'de gösterilen devreyi kuruyoruz. 3.
Bölücü tarafından sinyalin zayıflaması R1-R 2 yüksek frekanslarda sinyal zayıflamasına * karşılık gelir.
Nerede,
Yüksek frekanslarda, distorsiyona pozitif bir faktör getirmez. Düzeltici bir devre yardımıyla kesme frekansını sola kaydırabilir ve sistemin gerekli kararlılığını ve kalitesini sağlayabiliriz.
Ardışık KU'nun avantajları:
- Düzeltici cihazın basitliği (birçok durumda basit pasif RC konturları);
- Dahil etme kolaylığı.
Kusurlar:
- Sıralı düzeltmenin etkisi çalışma sırasında parametreler (kazanç faktörleri, zaman sabitleri) değiştiğinde azalır, bu nedenle sıralı düzeltme ile, daha pahalı elemanlar kullanılarak elde edilen elemanların parametrelerinin kararlılığı için artan gereksinimler uygulanır;
- Farklılaşan faz ilerlemesi RC - devreler (mikrodenetleyicilerdeki algoritmalar) yüksek frekanslı gürültüye duyarlıdır;
- sıralı entegratörler RC -devreler, geri besleme devresindeki devrelere göre daha hacimli kapasitörler içerir (büyük zaman sabitlerinin uygulanmasını gerektirir).
Genellikle düşük güçlü sistemlerde kullanılırlar. Bu, bir yandan seri düzeltme cihazlarının basitliği ve diğer yandan bu sistemlerde takojeneratör gibi yürütme motorunun boyutuyla orantılı hantal paralel düzeltici cihazların kullanılmasının uygun olmamasıyla açıklanmaktadır.
Unutulmamalıdır ki, amplifikatörlerin doygunluğu nedeniyle, entegre edici ve integro-farklılaştırıcı devrelerin veya benzer özelliklere sahip diğer bazı elemanların sıralı dahil edilmesi nedeniyle, istenen LAFC'yi düşük ve orta frekans aralığında oluşturmanın her zaman tavsiye edilmediği unutulmamalıdır. sisteme. Bu nedenle, geri besleme genellikle düşük ve orta frekans aralığında şekillendirme için kullanılır.
Karşı paralel düzeltici devrelerin sentezi
Düzeltici devreyi açmak için bir yer seçerken aşağıdaki kurallara uyulmalıdır:
- İstenen LACH türünü önemli ölçüde olumsuz etkileyen bu bağlantılar ele alınmalıdır.
- Geri bildirimin kapsamadığı bağlantıların LAFC'sinin eğimi, orta frekans aralığındaki eğime yakın seçilir. Bu koşulun yerine getirilmesi, basit bir düzeltici devreye sahip olmamızı sağlar.
- Düzeltici geri bildirim, doğrusal olmayan özelliklere sahip mümkün olduğu kadar çok bağlantıyı kapsamalıdır. Sınırda, geri bildirim kapsamına girmeyen bağlantılar arasında doğrusal olmayan özelliklere sahip hiçbir öğe bulunmadığından emin olmak için çaba sarf etmek gerekir. Geri bildirimin bu şekilde dahil edilmesi, geri bildirimin kapsadığı öğelerin özelliklerinin doğrusal olmama durumunun sistemin işleyişi üzerindeki etkisini önemli ölçüde azaltmayı mümkün kılar.
- Geri bildirim, büyük bir aktarım katsayısına sahip bağlantıları kapsamalıdır. Sadece bu durumda geri bildirim eylemi etkili olacaktır.
- Geri besleme girişine giden sinyal, geri beslemenin dahil edilmesinin onu yüklememesi için yeterli güce sahip bir elemandan alınmalıdır. Geri besleme çıkışından gelen sinyal, kural olarak, büyük bir giriş empedansına sahip sistem elemanlarının girişine uygulanmalıdır.
- Düzeltici bir geri besleme döngüsünde geri beslemenin nerede açılacağını seçerken, LAFC'nin frekans aralığındaki eğiminin 0 veya 20 dB/dec olması arzu edilir. Bu koşulun yerine getirilmesi, basit bir düzeltici devreye sahip olmamızı sağlar.
Genellikle sistemin yükseltici yolunu veya sistemin güç kısmını kaplarlar. Düzeltici geri bildirimler genellikle güçlü sistemlerde kullanılır.
YSÖP'ün Faydaları:
- Sistem kalite göstergelerinin, sistemin değişmeyen kısmının elemanlarının parametrelerindeki değişikliklere bağımlılığı azalır, çünkü önemli bir frekans aralığında, geri besleme tarafından kapsanan sistem bölümünün transfer fonksiyonu, sistemin transfer fonksiyonunun tersi ile belirlenir. anti-paralel düzeltici cihaz. Bu nedenle, orijinal sistemin öğeleri için gereksinimler sıralı düzeltmeden daha az katıdır.
- Sistemin kapsanan bölümünün transfer özellikleri geri besleme devresindeki döngünün parametreleri tarafından belirlendiğinden, geri beslemenin kapsadığı elemanların doğrusal olmayan özellikleri doğrusallaştırılır.
- Geri besleme genellikle güçlü bir çıkış ile sistemin uç bağlantılarından başladığından, arka arkaya düzeltici cihazların temini, yüksek güç gerektirse bile zorluk yaratmaz.
- Anti-paralel düzeltici cihazlar, seri olanlardan daha düşük bir parazit seviyesinde çalışır, çünkü bunlara giren sinyal, düşük geçişli bir filtre olan tüm sistemden geçer. Bu nedenle, hata sinyaline girişim uygulandığında karşı paralel düzeltici cihazların etkinliği, seri düzeltici cihazlara göre daha az azalır.
- Sıralı bir düzeltme cihazının aksine, geri bildirim, kendi zaman sabitlerinin nispeten küçük değerleri ile istenen LAFC'nin en büyük zaman sabitini gerçekleştirmeyi mümkün kılar.
Kusurlar:
- Arka arkaya KU genellikle pahalı veya hantal öğeler içerir (örneğin, takojeneratörler, farklılaştırıcı transformatörler).
- Geri besleme sinyalinin ve hata sinyalinin toplamı, geri beslemenin amplifikatörün girişini şöntlemeyeceği şekilde uygulanmalıdır.
- Düzeltici geri bildirimin oluşturduğu döngü kararsız olabilir. Dahili devrelerdeki kararlılık marjlarının azalması, bir bütün olarak sistemin güvenilirliğini kötüleştirir.
Belirleme yöntemleri:
- Analitik;
- Grafik-analitik;
- Model-deneysel.
Anti-paralel düzeltici devre hesaplandıktan sonra, dahili devrenin kararlılığı kontrol edilmelidir. Ana geri besleme açılırsa ve iç devre kararsızsa, sistemin elemanları arızalanabilir. Dahili devre kararsızsa, kararlılığı bir dizi düzeltici devre ile sağlanır.
Düzeltici bir negatif geri beslemenin LFC'sini oluşturmak için yaklaşık bir yöntem
Projeksiyonun blok şemasına izin verin
Sistem gösterilen forma getirilir
Şekil 1'de.
düzeltici geri bildirim;
bulaşma
açık döngü referans işlevi (düzeltilmemiş)
sistemler.
Böyle bir blok diyagram için, düzeltilmiş açık çevrim sistemin transfer fonksiyonu.
Frekans aralığındadenklem şu şekilde yazılacak
Onlar.
Seçim koşulu; (1)
- seçim denklemi (düşük ve yüksek frekans aralıklarında) (2)
Frekans aralığında
Seçim koşulu; (3)
alırız
yani,
Neresi - seçim denklemi(orta frekans aralığında). (4)
O zaman inşaat algoritması aşağıdaki gibidir:
- İnşa ediyoruz.
- İnşa ediyoruz.
- Bu özelliğin sıfırdan büyük olduğu frekans aralığını oluşturuyor ve belirliyoruz (seçim koşulu (3)).
- Sistemin spesifik teknik uygulamasına göre belirlenir, örn. düzeltici geri bildirim için giriş ve çıkış noktaları.
- İnşa ediyoruz.
- Seçilen frekans aralığında, seçim denklemine (4) göre çıkararak düzeltici elemanın logaritmik frekans yanıtını oluştururuz.
- (Seçim koşulu (1)) olan düşük frekans bölgesinde, seçim denklemi (2) karşılanacak şekilde seçim yaparız: .
- Yüksek frekans bölgesinde, eşitsizlik (2) genellikle 0 dB/dec'lik bir asimptot eğiminde karşılanır.
- Eşlenik asimptotların eğimi ve uzunluğu, düzeltici cihazın devre uygulamasının basitliğine göre seçilir.
- LAFC'ye göre, düzeltici bağlantının şematik bir diyagramını belirler ve tasarlarız.
Örnek. İzin ver ve ver. Geri bildirimin kapsadığı bağlantılar belirlenir. İnşa etmek için gerekli. Konstrüksiyon Şekil 2'de yapılmıştır. İlk sistem minimum fazlıdır. İnşaattan sonra, hesaplanan kontur stabilite açısından kontrol edilmelidir.
Düzeltici bir geri bildirim bağlantısının LFC'sini oluşturmak için kesin bir yöntem
Belirtilen kalite göstergelerini kesinlikle korumak gerekiyorsa, düzeltici devrenin frekans özelliklerinin tam değerlerini hesaplamak gerekir.
Düzeltilmemiş ACS'nin orijinal blok şeması
Dönüştürülmüş blok şeması
Düzeltilmiş ACS Eşdeğeri blok diyagramı

Gösterimi tanıtalım: , (1)
Daha sonra.
Bu, kapanış nomogramlarını kullanmamıza ve bulmamıza izin verir.
olduğunu ve bilindiğini varsayalım. Kapağın nomogramını ters sırada kullanıyoruz:
, => , .
Daha sonra ifadeden
Bir anti-paralel düzeltici devrenin LFC'si:
Düzeltici devrenin parametrelerini seçmek için LAFC'yi asimptotik bir biçimde temsil etmek gerekir.
Doğrudan paralel bir düzeltici elemanın LFC'sinin yapısı
Tasarlanan sistemin blok diyagramı Şekil 1'deki forma dönüştürülmüştür.
Bu durumda transfer fonksiyonunun dikkate alınması tavsiye edilir.
Frekans karakteristikleri ve, bir seri düzeltici devrenin frekans karakteristiklerine benzer şekilde belirlenir.
Özelliklerin bulunduğu frekans aralığında
onlar. düzeltici devre sistemin çalışmasını etkilemez, ancak frekans aralığında, nerede, özellikler
ve sistemin davranışı doğrudan paralel devrenin parametreleri tarafından belirlenir.
Frekans aralığında, nerede, LFC'yi belirlerken ve paralel bağlı linkleri formda sunmak tavsiye edilir, nerede, .
Sıralı düzeltici cihazın LFC'si ve daha önce olduğu gibi yapı. Kapanış nomogramını kullanarak, ve'yi buluruz ve son olarak .
Düzeltici bir cihazın tasarımı
CU kalite kriterleri:
- Güvenilirlik;
- Düşük maliyetli;
- Devre uygulamasının basitliği;
- Sürdürülebilirlik;
- gürültü bağışıklığı;
- Düşük güç tüketimi;
- Üretim ve operasyon kolaylığı.
Kısıtlamalar:
- Değerleri iki veya üç büyüklük sırasına göre farklılık gösteren tek bir düzeltici bağlantıya kapasitör veya direnç takılması önerilmez.
- Düzeltici bağlantıların LAFC'si, 2-3 on yıldan fazla olmayan bir frekans uzantısına, 20-30 dB'den fazla olmayan bir amplitüd zayıflamasına sahip olabilir.
- Pasif dört terminalli bir ağın aktarım katsayısı 0,05-0,1'den az tasarlanmamalıdır.
- Aktif düzeltici bağlantılardaki direnç değerleri:
a) geri besleme devresinde en fazla 1-1,5 MΩ ve en az onlarca kΩ;
b) onlarca kΩ ila 1 MΩ arasında doğrudan kanal devresinde.
- Kapasitör derecelendirmeleri: mikrofarad birimleri yüzlerce pFarad.
Düzeltici bağlantı türleri
- Pasif dört kutuplu ( R - L - C zincirleri).
Eğer öyleyse, yükün bilgi süreçleri üzerindeki etkisi ihmal edilebilir. .
Bu devrelerdeki çıkış sinyali, girişe göre daha zayıftır (veya seviye olarak eşittir).
Örnek. Pasif bütünleştirici-farklılaştırıcı bağlantı.
Nerede.
Farklılaştırıcı etkinin baskınlığı, eğer zayıflama miktarı k<0.5 или иначе.
Direnç en büyük olduğu için, düzeltici devrenin elemanlarının hesaplanmasına koşuldan, ayardan başlanması tavsiye edilir.

Nerede olduğunu belirtelim;
bir ara parametre tanımlayın =>
dolayısıyla, k = D .
DC bağlantısının giriş empedansı,
alternatif akımda
Dirençlerde eşleme yapılırken doğru akım için yeterli koşul, ilişkinin sağlanmasıdır,
alternatif akım üzerinde.
- Aktif dört kutuplular.
Amplifikatörün transfer katsayısı >>1 ise.
Örnek . Birinci dereceden aktif gerçek ayırt edici bağlantı.
Dahası, .
devreye alma sırasında seçilir (amplifikatörün sıfır ayarı).
alternatif akımda ve doğru akımda giriş empedansı aynıdır.
İşlemsel yükselteçlerin çıkış direnci onlarca ohm'dur ve esas olarak çıkış transistörlerinin toplayıcı devrelerindeki dirençlerin değerleri ile belirlenir.
Şema, tüm frekans aralığında değil, yalnızca orijinal ACS'nin düşük ve orta frekansları aralığında bulunan sistemin kesme frekansına yakın belirli bir bantta ilerleme sağlar. İdeal bağlantı, faydalı sinyalin üzerine bindirilmiş girişim spektrumunun bulunduğu bölgede yüksek frekansları güçlü bir şekilde vurgularken, gerçek devre bunları önemli bir amplifikasyon olmadan iletir.
- Farklılaştırıcı trafo.

Transformatörün birincil sargı devresinin direnci.
trafo dönüşüm oranı.
Stabilizasyon trafosunun transfer fonksiyonu
benziyor
Nerede, boş modda trafo endüktansı; .
- Pasif dört terminalli alternatif akım.
AC devrelerde DC düzeltme devreleri kullanılabilir.
Düzeltici devreleri açma şeması aşağıdaki gibidir:
Temel düzeltici bağlantıların koordinasyonu
Üretilmiş:
- Aktif bağlantıların yüklerine göre (amplifikatörlerin yük akımları izin verilen maksimum değerleri geçmemelidir);
- Direnç çıkış girişi ile (doğru akımda ve sistem çalışma aralığının üst frekansında).
İşlemsel amplifikatör yük değerleri, uygulama özelliklerinde belirtilmiştir ve genellikle 1 kΩ'dan fazladır.

Not. İmza<< означает меньше как минимум в 10 раз.
İşlemsel yükselteçler için gereksinimler:
- Gerilim kazancı.
- Küçük sıfır kayması.
- Büyük giriş empedansı (100 kΩ 3MΩ).
- Düşük çıkış direnci (onlarca ohm).
- Frekans çalışma aralığı (bant genişliği).
- Güç kaynağı voltajı +5V, ancak 10V'tan az değil.
- Tasarım (bir muhafazadaki amplifikatör sayısı).
Tipik Düzenleyiciler
regülatör türleri:
- P-regülatörü (gr. statolar ayakta; statik düzenleyici orantılı bir düzenleme kanunu oluşturur);
Artan kp ile kararlı durum hatası azalır, ancak ölçüm gürültüsü artar, bu da çalıştırma elemanlarının aktivitesinde artışa neden olur (sarsıntılı çalışırlar), mekanik kısım aşınır ve ekipmanın hizmet ömrü önemli ölçüde azalır.
Kusurlar:
● nesne statik ise, kontrol edilen değerin ayarlanan değerden kaçınılmaz sapması;
● düzenleyicinin geçici sürecin başlangıcında rahatsız edici etkilere gecikmeli tepkisi.
- I-regülatörü (entegre);
- PD kontrolörü (orantılı-farklı);
- PI kontrolörü (oransal-integral);
- PID denetleyicisi (oransal-integral-diferansiyel);
- röle denetleyicisi.
Geri beslemede D tipi regülatör kullanılır ve DI kullanılmaz.
Bu düzenleyiciler birçok durumda şunları sağlayabilir:kabul edilebilir yönetim, kurulumu kolay ve ucuz seri üretimde.
PD denetleyici
Yapısal şema:

zorla bağlantı
PD kontrolörünün gerçek transfer fonksiyonu.
düzenleme kanunu.

(1) regülatörsüz;
(2) P-regülatörü;
(3) PD denetleyicisi.
Bir PD kontrol cihazının avantajları:
- Kararlılık marjı artar;
- Önemli ölçüde geliştirilmiş kalite
düzenleme (dalgalanmayı azaltır
Ve geçiş zamanı
işlem).
Bir PD kontrol cihazının dezavantajları:
- Düşük kontrol doğruluğu (statik çalışma
orijinal sistem ne zaman değişmez kp \u003d 1);
- Yüksek frekanslardaki girişim yükseltilir ve
doygunluk nedeniyle sistemin bozulması
amplifikatörler;
- Pratikte uygulanması zor.
Bir PD kontrol cihazının uygulanması
Giriş ve geri besleme sinyalleri basitçe toplanır.
Giriş eyleminin ve geri beslemenin işaretlerini değiştirirseniz, kontrolör çıkışına bir invertör bağlanmalıdır.
İşlemsel yükselticinin geri beslemesindeki zener diyotları, çıkış sinyali seviyesini önceden belirlenmiş bir değerle sınırlamak için tasarlanmıştır.
Giriş devrelerinde ve gerektiği gibi açılır. Bu arzu edilir. Hariç tutulursa, amplifikatör parazit nedeniyle doygunluk moduna girebilir. Seçildi (20 kOhm'a kadar değer).
Kontrolörün kontrol kanalı üzerinden transfer fonksiyonu:
PI denetleyicisi
(Yunanca isos hatta dromos koşma; izodromik düzenleyici)


Düşük frekanslarda, bütünleştirici etki hakimdir (statik hata yoktur) ve yüksek frekanslarda, (geçici sürecin kalitesi düzenlemenin I-yasasından daha iyidir) etkisi hakimdir.
düzenleme kanunu.
- bir regülatörün olmaması;
- P-regülatörü;
- PI denetleyicisi.
Avantajlar:
- Uygulama kolaylığı;
- Statikte düzenlemenin doğruluğunu önemli ölçüde artırır:
Sabit bir giriş eylemindeki sabit durum hatası sıfıra eşittir;
Bu hata, nesne parametresi değişikliklerine duyarsızdır.
Kusurlar : sistemin astatikliği bir artar ve sonuç olarak kararlılık marjı azalır, geçişin salınım süreci artar, artar.
PI denetleyicisinin uygulanması
PID denetleyicisi
Düşük frekanslarda bütünleştirici etki, yüksek frekanslarda ise farklılaştırıcı etki hakimdir.
düzenleme kanunu.
PID denetleyicisini kurarken, statik sistem astatik hale gelir (statik hata sıfırdır), ancak dinamikte, farklılaştırıcı bileşenin eylemi nedeniyle astatizm kaldırılır, yani geçici sürecin kalitesi artar.
Avantajlar:
- Yüksek statik doğruluk;
- Yüksek performans;
- Büyük stabilite marjı.
Kusurlar:
- Açıklanan sistemler için geçerlidir
diferansiyel denklemler
bir nesnenin bir veya iki kutbu olduğunda sıralama
veya ikinci model ile yaklaşık olarak hesaplanabilir.
emir.
- Yönetim kalitesi için gereklilikler ortalamadır.
PID denetleyici uygulaması

Nerede ve.
İşlemsel yükselticinin LAFC'sine göre belirliyoruz. Ardından, gerçek denetleyicinin transfer işlevi şu şekildedir:
Sistemlerde en çok PID denetleyici kullanılır.
- Atalet kısmı birinci dereceden bağlantıya yakın olan gecikmeli nesneler için, PI denetleyicisinin kullanılması tavsiye edilir;
- Atalet kısmı bir düzene sahip olan gecikmeli nesneler için en iyi kontrolör PID kontrolördür;
- PID denetleyicileri, kontrol nesnesi bir veya iki kutba sahip olduğunda (veya ikinci dereceden bir modelle yaklaşık olarak hesaplanabildiğinde), sabit durum hatasını azaltma ve geçici yanıt tipini iyileştirme açısından etkilidir;
- Kontrol işlemi, örneğin bir akış veya basınç kontrol sisteminde olduğu gibi yüksek dinamiklerle karakterize edildiğinde, kendi kendini uyarma fenomeninden kaçınmak için farklılaştırıcı bileşen kullanılmaz.
Birleşik kontrol sistemlerinin hesaplanması
kombineotomatik bir sistemde bu tür bir kontrol, sapma yoluyla kapalı bir kontrol döngüsü ile birlikte, etkileri ayarlamak veya rahatsız etmek için harici bir dengeleme cihazı kullanıldığında.
değişmezlik ilkesikontrol kanalı yoluyla giriş eyleminin biçimine veya rahatsız edici eylemin telafisine bakılmaksızın dinamik ve statik hataların telafisi ilkesi.
ile ilgili olarak değişmez
rahatsız edici etki, geçici sürecin tamamlanmasından sonra,
başlangıç koşulları tarafından belirlenir, kontrol edilen değer ve sistem hatası
bu etkiye bağlıdır.
Otomatik kontrol sistemi iseile ilgili olarak değişmez
ana etkitarafından belirlenen geçici sürecin tamamlanmasından sonra ise
başlangıç koşullarında, sistemin hatası bu etkiye bağlı değildir.
- Telafi edici cihazların pertürbasyon kanalına göre hesaplanması
Orijinal sistemin blok diyagramı gösterilen forma dönüştürülsün.
Şekil 1'de.
Pertürbasyonun uygulama noktasını sistemin girişine aktaralım (Şekil 2).

Çıkış koordinatı için denklemi yazalım: .
Pertürbasyonun çıktı fonksiyonu üzerindeki etkisi F koşul sağlanırsa yok olurmutlak değişmezlikrahatsız edici etkilere karşı sistemler:
Pertürbasyonun tam telafisi için koşul.
Harici kontrolörler, pertürbasyon kanalı üzerinde aşağıdaki doğrulukla değişmezliği elde etmek için kullanılır: , çünkü paydanın sırası genellikle payın sırasından daha yüksektir.
Örnek . Nesne ve denetleyicinin periyodik olmayan bağlantılar gibi davranmasına izin verin. Kural olarak en büyük zaman sabiti nesneye aittir.
Daha sonra
Şek. 3.
Dengeleme devresi, ayırt edici özelliklere ve yüksek frekanslarda aktif farklılaştırıcı özelliklere sahip olmalıdır (çünkü karakteristik kısmen frekans ekseninin üzerinde yer alır).
Mutlak değişmezliğe ulaşmak imkansızdır, bununla birlikte, sınırlı bir frekans aralığında uygulama sağlayan basit bir dengeleme devresi ile bile telafi etkisi önemli olabilir (Şekil 3'te).
Bir bozulmayı ölçmek teknik olarak zordur ve her zaman mümkün değildir, bu nedenle, sistemleri tasarlarken, bozulmaları ölçmek için genellikle dolaylı yöntemler kullanılır.
2. Kontrol kanalı üzerinden hata telafili sistemlerin hesaplanması
Blok diyagramı Şekil 1 de gösterilen bu sistem için; 4, aşağıdaki ilişkiler geçerlidir:
Yanlışlıkla transfer işlevi.
Aşağıdaki parametrelere sahip bir dengeleme devresi seçersek, tam hata telafisi koşulunu elde edebiliriz:
(1) sistemin kontrol kanalındaki bir hataya karşı mutlak değişmezlik koşulu.
Takip sistemleri statik olarak uygulanmaktadır. Bu tür sistemler için bir örnek düşünün (Şekil 5).
Yüksek frekans bölgesinde, kompanzasyon devresindeki ikinci dereceden farklılaşma, amplifikatörlerin yüksek bir gürültü seviyesinde doygunluğuna yol açar. Bu nedenle, düzenlemenin somut bir etkisini veren yaklaşık bir uygulama gerçekleştirilir.
Astatik sistemler, bir kalite faktörü transfer katsayısı ile karakterize edilir k belirlenen =1 ve = k .
eğer k =10, o zaman hata %10'dur, çünkü
Düşük kaliteli sistem (Şekil 6).
Transfer fonksiyonu ile bir dengeleme devresi tanıtıyoruz
Bir takojeneratör, eğer
Mekanik giriş. Düşük kaliteli bir sistemin uygulanması
Basit.
Koşul (1)'den şunu elde edelim.
Daha sonra, 1. dereceden astatikliğe sahip bir sisteme sahip olarak,
ikinci dereceden astatizm (Şekil 7).
her zaman Y kontrol sinyalinin gerisinde kalıyor; tanıtarak hatayı azaltıyoruz. Dengeleme devresi kararlılığı etkilemez.
Kural olarak, bir dengeleyici bağlantı, ayırt edici özelliklere sahip olmalı ve aktif öğeler kullanılarak gerçekleştirilmelidir. Mutlak değişmezlik koşulunun tam olarak yerine getirilmesi, ikinci dereceden daha yüksek bir türev elde etmenin teknik uygunsuzluğu (kontrol döngüsüne yüksek düzeyde gürültü eklenir, dengeleme cihazının karmaşıklığı artar) ve atalet nedeniyle imkansızdır. gerçek teknik cihazlar. Dengeleme cihazındaki periyodik olmayan bağlantıların sayısı, temel güçlendirme bağlantılarının sayısına eşit olarak tasarlanmıştır. Periyodik olmayan bağlantıların zaman sabitleri, bağlantıların önemli bir frekans aralığında çalışma durumuna göre hesaplanır;
Düzenleyicilerin kademeli bağlantısı ile çok devreli bir otomatik kontrol sistemi oluşturma ilkesine denir.ikincil düzenleme ilkesi.
ACS'nin iki veya daha fazla döngü ile ikincil kontrolün sentezi, iç döngüden başlayarak döngülerin art arda optimizasyonu ile gerçekleştirilir.
∆θ
,
dolu
∆L,
dB
w ve (p)
W A1 (p)
1/T p
1/T 0
İlginizi çekebilecek ilgili diğer çalışmalar.vshm> |
|||
| 2007. | Otomatik kontrol sistemlerinin dinamik modu | 100.64KB | |
| ACS'nin dinamik modu. Dinamiklerin denklemi Kararlı durum modu, ACS için tipik değildir. Bu nedenle, ACS'nin ana çalışma modu, içinde geçici süreçlerin ortaya çıkmasıyla karakterize edilen dinamik mod olarak kabul edilir. Bu nedenle, ACS'nin geliştirilmesindeki ikinci ana görev, ACS operasyonunun dinamik modlarının analizidir. | |||
| 12933. | AYRIK KONTROL SİSTEMLERİNİN SENTEZİ | 221,91 KB | |
| Dijital kontrol cihazlarının sentezlenmesi görevi İşlevsel olarak gerekli unsurlardan oluşan kapalı ayrık bir sistemin kararsız olduğu veya kalite göstergelerinin gerekli olanları karşılamadığı durumlarda, düzeltilmesi sorunu veya bir kontrol cihazının sentezlenmesi görevi ortaya çıkar. Şu anda, kontrol cihazları oluşturmanın en rasyonel yolu, kontrol bilgisayarları veya özel dijital bilgisayarlar TsV ... | |||
| 2741. | GERİ BİLDİRİM İLE KONTROL SİSTEMLERİNİN SENTEZİ | 407,23KB | |
| Sürekli ve ayrık modellerin geçici ve frekans yanıtlarını oluşturalım: Sürekli bir sistemin geçici yanıtı. Ayrık bir sistemin geçici yanıtı. Sürekli bir sistemin frekans özellikleri. | |||
| 3208. | Otomatik kontrol sistemlerinin analizi ve yapımının temelleri | 458,63KB | |
| Belirli bir dinamik nesne için bağımsız olarak geliştirin veya literatürden sapma ilkesine göre çalışan bir otomatik kontrol sisteminin bir diyagramını alın. Sapma ve bozulma için kontrol döngüleri içeren birleşik bir sistem varyantı geliştirin. | |||
| 5910. | Dijital bilgisayarlı otomatik kontrol sistemleri | 928,83KB | |
| Son yirmi yılda, dijital bilgisayarların güvenilirliği ve maliyeti önemli ölçüde arttı. Bu bağlamda, kontrol sistemlerinde regülatör olarak giderek daha fazla kullanılmaktadırlar. Niceleme periyoduna eşit bir sürede, bilgisayar çok sayıda hesaplama yapabilir ve daha sonra nesneyi kontrol etmek için kullanılan bir çıkış sinyali üretebilir. | |||
| 5106. | Yönetim sistemlerinin ana çalışma türleri: pazarlama, sosyolojik, ekonomik (özellikleri). Kontrol sistemlerini iyileştirmenin ana yönleri | 178,73KB | |
| Modern üretimin ve toplumsal yapının dinamizmi bağlamında, yönetimin sürekli bir gelişim halinde olması gerekmektedir ki, günümüzde bu gelişimin yolları ve olanakları keşfedilmeden gerçekleştirilemez. | |||
| 14277. | Sistemlerin analizine, sentezine ve modellenmesine giriş | 582,75KB | |
| Açıkça söylemek gerekirse, sistemi inceleyen üç bilim dalı vardır: sistemoloji, teorik yönleri inceleyen ve teorik yöntemleri kullanan sistem teorisi, bilgi teorisi, olasılık teorisi, oyun teorisi vb. Bir sistemin organizasyonu, bazılarının varlığıyla ilişkilidir. Bu sistemdeki neden-sonuç ilişkileri. Sistemin organizasyonu, biyolojik bilgi, ekolojik, ekonomik, sosyal, zamansal ve mekansal gibi çeşitli biçimlere sahip olabilir ve madde ve toplumdaki neden-sonuç ilişkileri tarafından belirlenir. Şurada... | |||
| 5435. | Çamur yoğunlaştırma prosesi için otomatik kontrol sisteminin iyileştirilmesi | 515.4KB | |
| Uralkali'nin granülü esas olarak Brezilya, ABD ve Çin'e ihraç edilmekte ve burada ya doğrudan toprağa uygulama için ya da nitrojen ve fosforlu gübrelerle karıştırılarak kullanılmaktadır. | |||
| 20340. | İŞLETMEDE YÖNETİM SİSTEMİNİN ANALİZİ VE SENTEZİ | 338,39KB | |
| Yönetim sisteminin iyileştirilmesi ve modern koşullarda günümüzün yönetim uygulaması, hem bir işletmenin yönetimine hem de onun iyileştirilmesine ve geliştirilmesine yönelik bir araştırma yaklaşımına duyulan ihtiyaç konusunda ciddi bir soruna işaret etmektedir. | |||
| 1891. | L.M. yöntemiyle ayrı bir modal kontrol yasasının sentezi. Boyçuk | 345.04KB | |
| W(z) fonksiyonuna dayalı olarak, durum uzayında ayrık bir nesnenin tanımını oluşturun. Bu nesnenin kontrol edilebilirlik ve gözlemlenebilirlik koşullarının yerine getirildiğini kontrol edin. | |||
LFC yöntemi, otomatik kontrolün sentezi için en yaygın yöntemlerden biridir, çünkü LFC yapısı, kural olarak, çok az veya hiç hesaplama çalışması olmadan gerçekleştirilebilir. Asimptotik "ideal" LACH'ı kullanmak özellikle uygundur.
Sentez işlemi genellikle aşağıdaki işlemleri içerir;
1. Sistemin değişmez parçasının LAFC'sinin yapımı.
Kontrol sisteminin değişmeyen kısmı, kontrol nesnesi ve çalıştırma elemanının yanı sıra ana geri besleme elemanı ve karşılaştırma elemanını içerir.
2. LACH'ın istenen kısmının inşası.
İstenen LACH programı, tasarlanan kontrol sistemi için geçerli olan gereksinimler temelinde yapılır. İstenen LAFC Lzh şartlı olarak üç kısma ayrılabilir: düşük frekans, orta frekans ve yüksek frekans.
2.1 Düşük frekanslı kısım, sistemin statik doğruluğu, kararlı durum koşullarındaki doğruluğu ile belirlenir. Statik bir sistemde, düşük frekanslı asimptot x eksenine paraleldir. Astatik bir sistemde, bu asimptotun eğimi –20mdB/dec'dir, burada astatizmin sırasıdır ( =1.2). Düşük frekanslı kısım Lzh'nin ordinatı, açık sistemin transfer katsayısı K'nin değeri ile belirlenir. Düşük frekanslı kısım Lzh ne kadar geniş olursa, sistem tarafından kapalı zayıflama olmadan o kadar yüksek frekanslar üretilir.
2.2 Orta frekans kısmı en önemlisidir, çünkü istikrarı, kararlılık marjını ve dolayısıyla geçici olayların kalitesini belirler ve genellikle geçici yanıtın kalitesine ilişkin göstergelerle değerlendirilir. Orta frekans asimptotunun ana parametreleri, eğimi ve kesme frekansı cp'dir (Lzh'nin x eksenini geçtiği frekans). Orta frekans asimptotunun eğimi ne kadar büyük olursa, sistemin iyi dinamik özelliklerini sağlamak o kadar zor olur. Bu nedenle, -20dB/dec'lik eğim en uygun olanıdır ve nadiren -40dB/dec'i aşar.Cp kesme frekansı, sistemin hızını ve aşma değerini belirler. Ne kadar çok cf, hız o kadar yüksek, geçici yanıtın düzenleme süresi (Tpp) o kadar kısa, aşma o kadar büyük olur.
2.3 LAFC'nin yüksek frekanslı kısmının sistemin dinamik özellikleri üzerinde çok az etkisi vardır. Asimptotunun eğiminin mümkün olduğu kadar büyük olması daha iyidir, bu da aktüatörün gerekli gücünü ve yüksek frekanslı gürültünün etkisini azaltır. Bazen, yüksek frekanslı LAFC'yi hesaplarken dikkate almazlar.

aşmanın büyüklüğüne bağlı olarak bir katsayı nerede,
Şekil 1'de gösterilen çizelgeye göre seçilmelidir.

Şekil 18 - İzin verilen aşım katsayısının belirlenmesi için grafik.
Düşük frekanslı asimptotun ordinatı sırasıyla katsayı ile belirlenir.
geçici, açık döngü CAP'nin yüksek frekanslı asimptotunun kazanç katsayısı ve eğimi.
3. Düzeltici cihazın parametrelerinin belirlenmesi.
3.1 Düzeltici cihazın LAFC grafiği, değiştirilemez grafiğinin değerlerinin istenen LAFC'nin grafiğinin değerinden çıkarılmasıyla elde edilir, ardından transfer fonksiyonu düzeltici cihazın LAFC'sinden belirlenir.
3.2 Regülatörün transfer fonksiyonuna göre, bir düzeltici cihazın uygulanması için bir elektrik devresi seçilir ve parametrelerinin değerleri hesaplanır. Regülatör devresi pasif veya aktif elemanlar üzerinde olabilir.
3.3 Paragraf 3.1'de elde edilen düzeltici cihazın transfer işlevi, ACS'nin genelleştirilmiş blok şemasına dahil edilmiştir. Düzeltilmiş ACS'nin genelleştirilmiş blok şeması kullanılarak, bir bilgisayar yardımıyla geçici süreçlerin grafikleri oluşturulur; verilenlerden daha kötü olma.
Örnek:
6. Otomatik kontrol sisteminin logaritmik frekans karakteristikleri yöntemiyle sentezi.
Doğrusal ACS'nin sentezi
Kontrol sistemlerinin sentezi ile ilgili temel kavramlar
Otomatik kontrol teorisinde çözülen tüm matematiksel problemler iki büyük sınıfta birleştirilebilir - otomatik sistemlerin analiz problemleri ve sentez problemleri.
Analiz problemlerinde, sistemin yapısı tamamen bilinir, sistemin tüm (kural olarak) parametreleri ayarlanır ve bazı istatistiksel veya dinamik özelliklerinin değerlendirilmesi gerekir. Analizin görevleri, kararlı durum koşullarında doğruluğun hesaplanmasını, kararlılığın belirlenmesini ve sistemin kalitesinin değerlendirilmesini içerir.
Sentez problemleri, analizin ters problemleri olarak düşünülebilir: verilen kalite göstergelerine göre sistemin yapısını ve parametrelerini belirlemeyi gerektirirler. En basit sentez problemleri, örneğin, bir açık devrenin transfer katsayısını belirli bir hatadan veya integral tahmini için minimum koşuldan belirleme problemleridir.
Doğrusal ACS'nin sentezi, bir yandan verilen kalite ve basitlik teknik uygulama ve güvenilirlik göstergelerini karşılayan böyle bir blok diyagramın, parametrelerinin, özelliklerinin seçimi olarak anlaşılmaktadır.
Sentez Özellikleri
ACS, bir kontrol nesnesi ve düzeltici cihazlar içerir (bunlar, yapısı ve parametreleri sentez görevine göre değişen cihazlardır).
Kalite göstergelerinin görevi, kabul edilebilir kalite göstergelerinin üst sınırı olarak tanımlanır, yani. verilen kalite göstergeleri karar verme alanını belirler. Bu nedenle, sentez sırasında, ACS'nin yapısının ve parametrelerinin kesin bir seçimini belirlemeye izin veren bir optimizasyon kriteri seçilir.
Modern ACS için, sentez prosedürü ACS'nin yaklaşık özelliklerini belirler, bu nedenle nihai sonuç, sentezlenen ACS'nin analizi (ayarlama, modelleme) sonucunda elde edilir.
ACS sentezinin aşamaları
Kontrol nesnesi analiz edilir, nesnenin statik ve dinamik özellikleri belirlenir.
ACS'nin verilen kalite göstergelerine dayalı olarak bir optimizasyon kriteri belirlenir.
ACS'nin bir blok şeması oluşturuluyor, uygulanmasının teknik araçları seçiliyor.
Optimum dinamik özelliklerin sentezi.
Optimal dinamik rejime yaklaşım, yani verilen kalite göstergelerini karşılayan dinamik özelliklerin (istenen) seçimi ve düzeltici cihazların teknik uygulamasının basitliği.
Tüm sistemin istenen dinamik özelliklerini sağlayan düzeltici cihazların dinamik özelliklerinin belirlenmesi.
Düzeltici cihazın belirli bir dinamik özelliğine göre düzeltici cihazların teknik uygulama şemasının ve yönteminin seçimi.
Sentezlenen ACS'nin analizi.
LAFC yöntemiyle sistemlerin sentezi
Düzeltici cihazları etkinleştirmenin iki yolu vardır:
Tutarlı bir şekilde kontrol nesnesine.
Burada W 0 (P) nesnenin transfer fonksiyonudur ve W çekirdek (R) düzeltici cihazın transfer fonksiyonudur.
İtibar seri anahtarlama devresi, teknik uygulamanın basitliğidir.
Kusurlar: bu devrenin girişime karşı yüksek hassasiyeti; nesne parametrelerindeki değişikliklere güçlü bağımlılık.
Nesnenin bir kısmına paralel.
D

Kusurlar: bu devrenin düzeltici cihazı, devrenin (1) aksine, pahalı devreler tarafından gerçekleştirilir.
ACS'nin sentezinin gerçekleştirildiği dinamik özellikler olarak, nesnenin açık sisteminin LAFC'si seçilir, çünkü nesnenin parametrelerini ondan belirlemek oldukça kolaydır.
İstenen LACH
İstenen LAFC'yi oluştururken, üç frekans aralığı ayırt edilir:
düşük frekanslar ( İle). Bu frekans aralığı, statik özellikleri yansıtır.
Orta frekans aralığı ( İle). Adım girişi altındaki nesnenin dinamik özelliklerini belirler.
Yüksek frekans aralığı ( İle). Bu frekans aralığı statiği etkilemez, ancak hızla değişen bir girdi ile nesnenin dinamik özelliklerini belirler.
modal denetleyici
Bu bir kök sentezi yöntemidir, yani, karakteristik denklemin köklerinin karmaşık düzlemde istenen konumuna göre, her dinamik değişken için negatif geri besleme katsayılarını temsil eden bir modal denetleyici oluşturulur.

Nesnenin açıklaması verilir:

Verilen (istenen) kalite göstergelerine göre istenen polinom D sarı (p) türünü ayarladık.
Şunlar gibi geri bildirimleri tanıtalım:

Nerede  - kontrolörlü sistemin karakteristik denklemi.
- kontrolörlü sistemin karakteristik denklemi.
Örnek: Bir denklem sistemi verildiğinde


n 1 Ü x 1 x 2 x 3


Kontrol matrisini dikkate almamız gerekiyor:

 Rank sistemin mertebesine eşit olduğu için sistem kontrol edilebilir.
Rank sistemin mertebesine eşit olduğu için sistem kontrol edilebilir.
Sistemle aynı derecede istenen polinomu seçiyoruz:
D sarı (p)=(p+w 0 ) 3 =p 3 +3p 2 w 0 +3pw 0+ w 0 3


 - kalite değerlendirmesi, nerede
- kalite değerlendirmesi, nerede  - geçiş süreci süresi
- geçiş süreci süresi
Seçilen değer ile  alırız:
alırız:
K ok1 = 2; K ok2 = -1; K ok3 =5;
yönetilebilirlik ve görünürlük.
Giriş sinyallerinden herhangi birini değiştirerek, sistemin çıkışında istenen değeri sonlu bir süre içinde elde etmek mümkün ise, sistem kontrollü olarak adlandırılır.

onsuz sistem kontrol edilemez olacak ve onunla -
yönetilen.
kontrol edilebilirlik kriteri
Sistemin kontrol edilebilmesi için kontrol edilebilirlik matrisinin rankının n (nesnenin mertebesi) olması gerekli ve yeterlidir.
Genel olarak kontrol edilebilirlik matrisi dikdörtgen şeklindedir. Sistemin bir girişi varsa, matrisin boyutu vardır  .
.
Gözlenebilirlik.
Y çıkış sinyalleri X durum değişkenlerini geri yüklemek için kullanılabiliyorsa sistem gözlemlenebilir olarak adlandırılır.
Gözlenebilirlik, ölçülebilirliğin aksine, yalnızca X durum değişkenlerinin ölçümünü değil, aynı zamanda ölçülen değişkenlerden ölçülemeyen X değişkenlerinin hesaplanmasını da içerir.
Ölçülebilirlik, herhangi bir değişkenin doğrudan ölçülebildiği durumdur.
Gözlemlenebilirlik kriteri.
Sistemin gözlemlenebilir olması için gözlemlenebilirlik matrisinin rankının n (nesnenin mertebesi) olması gerekli ve yeterlidir.