Направи си сам ултразвуков 3D скенер. Има два основни метода
) решихме да се опитаме да го сглобим и, ако е възможно, да подобрим дизайна му. Дори не можехме да си представим какво ще излезе от него, още по-малко да си представим, че ще спечелим няколко научни и инженерни изложения с него. Но по ред. Който се интересува от резултата, добре дошъл в котката (много снимки).
Първи прототип
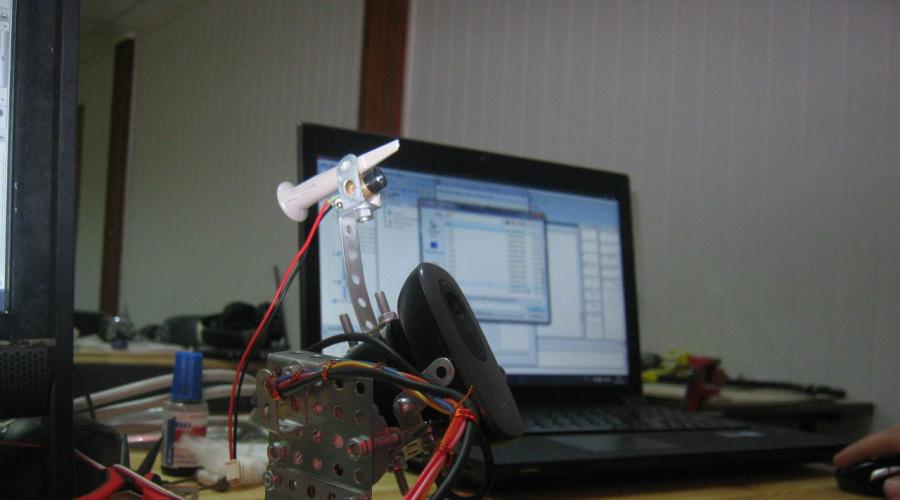
Първо решихме да събираме лазерен далекомер. Направена е по статия в радиолюбителски форум. Само лазерна показалка и камера. На Java е написана програма за обработка на изображения. За едно измерване бяха направени две снимки: със и без лазер. След като ги сравнихме, определено можехме да намерим лазерната точка. След като това проработи, далекомерът беше монтиран на платформа, която можеше да се върти в две равнини. Преди да ви покажа какво имам, трябва да ви предупредя - в лятното училище няма много материали, така че съставихме прототип от това, което имахме:
Камерата се вижда веднага, а лазерът е този месингов цилиндър над нея. За да завъртим платформата използвахме две стъпков мотор, които от своя страна бяха свързани към контролната платка на микроконтролера Atmega32. Лазерът беше свързан към него. Самата платка беше свързана към компютъра чрез USB->UART адаптер. Програмата на компютъра правеше снимки, обработваше ги, въвеждаше координатите на получените точки във файл и изпращаше команди към контролното табло.
Резултатът беше интересен. Да, намерихме разстоянието. Да, можем да „целим“ всяка точка в полусферата над скенера. И радостта ни нямаше граници. Но когато преценихме времето за сканиране на това полукълбо, то се оказа 48 часа. И не става въпрос за камерата. И дори не в Java. Проблемът беше, че инсталацията беше толкова крехка, че се клатеше след всяко завъртане в продължение на пет секунди. Трябваше да направя измерване, да се обърна и да изчакам пет секунди, докато спре да се люлее. Освен това библиотеката за камерата я включваше и изключваше преди всяка снимка. Това отне 1-2 секунди. Но лятното училище свършваше и нямаше време да го преработим: вече беше вечерта преди проектът да трябва да бъде готов. Или по-скоро сутрин. На следващия ден представихме проекта си на конкурс пред научно жури и неочаквано спечелихме. Вероятно заради тази победа решихме да продължим работата си по този проект.
Втора версия
Всъщност лятото свърши и учебната година започна. Изчезна желанието за работа. Инсталацията беше планирана да бъде завършена до следващото състезание, което беше след цял месец. месец. И тогава изведнъж три дни. Но след месец решихме да променим обстановката. Сглобете го плътно, монтирайте леща върху лазерната показалка, която ще създаде лазерна линия. Това би позволило сканиране на 720 точки наведнъж (скенерът имаше HD камера). Само три дни направиха своите корекции:
Вторият скенер е сглобен от пластмасови линийки, лепило, маскираща лента и се държи на място само със синя електрическа лента. Вместо леща има епруветка. Зелен лазер свети върху тази епруветка. Отразеният лъч създава повече или по-малко равномерна лазерна ивица върху екрана. Далекомерът е прикрепен само към един двигател, който го върти в хоризонтална равнина. Контролната платка е сменена с STM32VLDiscovery. Просто познавам STM32 по-добре и освен това Atmega изгоря и програмистът беше изгубен отдавна. Не изглежда много добре, но работи! Вибрациите намаляха и съответно скоростта се увеличи. Но не много. Тук беше открита много интересна уловка - китайската лазерна показалка не се включи веднага, а постепенно увеличи мощността си в продължение на секунда. Така секунда за осцилиране, секунда за загряване на лазера, секунда за снимане и те са две. Така че получаваме 4 секунди. Но при едно измерване откриваме разстояния до 720 точки! Процесът на сканиране изглеждаше така:

И резултатът е такъв:

Снимката не изглежда много интересна, но халбата беше обемна в програмата. Можете да го погледнете от различни ъгли.
Каква е реалната конкуренция? Но нищо! Сканирахме всичко в 4 сутринта, а в 9 сутринта на щанда установихме, че лазерът е изгорял. Както се оказа, докато го пренасяхме от хотела до щанда, в него попадна дъжд и когато се включи, изгоря. И когато не работи, изглежда толкова зле, че е трудно да се повярва на думите „работеше преди 5 часа“. Бяхме разстроени. Желанието да продължим изчезна заедно с дима от лазера. Но все пак беше събрано...
Трета версия
И беше сглобен отново за състезанието. Още повече, че се готвихме дълго и старателно. Повече от седмица. И ето го резултата:
Първото нещо, което хваща окото ви е, че сега сканираме не зоната около скенера, а обект, който се върти на платформата. Взехме и правилния обектив, сглобихме всичко добре, пренаписахме програмата и също сменихме табло за развитиекъм домашно. И сега правим само една снимка на измерване. Лазерът е достатъчно мощен и обективът е достатъчно добър, за да локализира уникално лазера на снимка. Благодарение на това не чакаме лазера да загрее - той винаги е включен. И сега включваме камерата само веднъж. Тоест времето се изразходва най-вече за завъртане на платформата и обработка на изображението. В програмата е добавено меню за избор на точност. Времето за сканиране е от две до десет минути. В зависимост от избраната точност. С максимална точност се оказва, че платформата се върти с 0,5 градуса на стъпка, а разстоянието се определя с точност до 0,33 мм. Платформата се задвижва от стъпков двигател чрез скоростна кутия. Самата платформа е голям диск, а гумената ролка на вала на двигателя е малка. Моторът и лазерът се управляват от микроконтролер STM32F050F4 чрез полеви транзистори. В самото начало на статията е сканирано изображение на играчката, получено с помощта на този скенер. Тъй като скенерът създава облак от точки във формат .obj, след триангулация можем да отпечатаме сканирания обект на 3D принтер, както се вижда на същата снимка. На екрана можем да видим модела след триангулация. По модела не е извършвана ръчна работа.
Спечелихме състезанието. И той даде вход за международното състезание Intel ISEF. Така че започнахме да работим върху следващия скенер.
Четвърта версия

На този моментТова последна версияскенер, който сглобихме. За сравнение има втора версия на платформата. Опитахме се да подходим към разработването на четвъртия скенер възможно най-задълбочено. Инсталацията е начертана в CAD, частите са изрязани с лазер, всичко е боядисано, нищо ненужно не стърчи отвън. Промени: Платформата вече всъщност е зъбно колело. Тя е изрязана от плексиглас и има 652 зъба по ръбовете. Това решава проблем, който сериозно повреди сканирането в предишния скенер: гумената ролка се плъзгаше малко, поради което платформата често не се въртеше на 360 градуса. Сканиранията бяха или „изрязани“, или припокрити. Тук винаги сме знаели колко точно е завъртяна платформата. Мощността на лазера се регулира чрез софтуер. Благодарение на това беше възможно да се променя мощността на лазера в движение, като се избягва осветяването на ненужни части при условия на слаба светлина. За да контролираме цялата електроника, решихме да не създаваме нова платка, а просто да използваме F401RE-Nucleo за отстраняване на грешки. Има инсталиран ST-LinkV2.1, който работи като дебъгер и USB->UART адаптер.
Точността беше невероятна: Ъглова разделителна способност 0,14 градуса. На разстояние 0,125 мм. Областта на сканиране е цилиндър с височина 20 см и диаметър 30 см. Цената на всички части и лазерно рязане по време на създаването му (май 2014 г.) е по-малко от 4000 рубли.
По време на употреба ние го настройваме на максимална точност само веднъж. Скенерът продължи 15-20 минути. Получихме почти 2 милиона точки. Лаптопът отказа да изчисли модела от облака от точки. Експериментът не е повторен.
Заключение
В близко бъдеще планираме да възобновим работата по проекта и затова ще финализираме както програмата, така и инсталацията. Надявам се скоро да пишем за това стъпка по стъпка монтаж, ще публикуваме чертежи, програми и всичко останало. Това вече няма да се вписва в тази статия.Благодаря на всички, които прочетоха до края!
UPD:
Един колега намери видеоклип за работата на скенера, който заснехме в ISEF:
Да, по-голямата част от видеото не е интересно, но накрая има модел на лаптоп.
А ето и примери за сканирани обекти. Но всички те принадлежат към третата версия на скенера.
Dropbox
Във файла model.obj можете ясно да видите какво се случва, когато тази гумена ролка се плъзне по мотора - кучето има три очи. Сканирането беше спряно, причинявайки прекъсване. Всички файлове са облаци от точки. Можете да го отворите с помощта на MeshLab. Моделите не са обработвани на ръка. Напълно необработени данни. Отгоре можете да видите „бели петна“ - области без точки. Камерата не ги вижда. Бели петна могат да се видят и на други места. Те се появяват или в области, които са твърде тъмни, или когато повърхностите се припокриват. Например във файла stn_10.obj рогата на козата се припокриват, поради което вътрешната повърхност на рогата не е сканирана.
Всеки умници, поздравления! Освен ако не живеете някъде насред нищото през последните няколко години, вероятно сте чували за това страхотно нещо, наречено 3D принтиране. С него можем да отпечатаме почти всичко, разбира се, ако има съответен 3D модел. И днес ще научим как да получим такива модели с помощта на обикновена камера!
Така че, за да получите 3D модели на необходимите обекти, има много мозъчна сила, но най-доброто, разбира се, е 3D сканирането, което в комбинация с добър принтер ви позволява да възпроизведете всеки предмет, от цяла къща до обикновена обеца. В допълнение, полученото сканиране може да се използва като основа за вашето бъдеще домашно приготвени. Просто помислете какво можете да направите с обикновените цифрова фотография, а сега също ще ви помогне да създавате реални триизмерни обекти!
Друго хубаво нещо при 3D сканирането е, че вероятно вече имате необходимото оборудване за него и вероятно го държите някъде в джоба си или го разглеждате (мисля, че докато пиша това, вече сте се досетили какво е това:)). Да, това е оборудване, което ви позволява да заснемете света около вас в 3D, обикновена камера. И той, съчетан с малка сума мозъчни учении евтин, или дори безплатен софтуер, се превръща в най-универсалния 3D принтер в целия свят. Запознайте се с това мозъчна статияи ще научите как точно да го направите!
Стъпка 1: Как работи?



Идеята е проста - трябва да получите доста снимки на обекта, от който се нуждаете, докато
Всеки детайл от този обект трябва да присъства на поне 3 снимки. След това се зареждат в специална програма, който разпознава отделни места на обект и използвайки тригонометрия и „тъмна магия“, показва тяхната позиция в три равнини. След като разпозна достатъчен брой такива места (понякога до няколко милиона), програмата може да създаде цифров модел на себе си. мозъчен обект, с който можете например да изненадате приятелите си, или да го вградите във видео игра, или да го изпратите за 3D печат.
За получаване подходящи снимкитрябва да практикувате малко, разбира се, не е нужно да ставате професионален фотограф, но ако опитът ви по този въпрос не надхвърля селфитата, тогава си струва да практикувате.
Co специализиран софтуерработата не е трудна, повечето безплатни пакетине предоставят голямо количествоопции, толкова лесни за използване. По-професионалните версии изискват време за работа с тях и материални разходи за закупуването им, но накрая ще ви изненадат приятно.
Стъпка 2: Ще работи ли камерата ми?

да И това го казвам със сигурност. Естествено, някои камери ще работят по-добре от други. „Идеалната“ камера ще произвежда кристално ясни, ясни, красиво експонирани, без изкривявания снимки с висока разделителна способност при всякакви условия. За съжаление няма такива камери, но засега толкова. В това мозъчно лидерствоИзползвани са няколко вида камери и представените сканирания са направени от снимки, направени с всяка камера.
Добър ден, промиване на мозъци! ДомашноТози, за който ще говорим в тази статия, е 3D лазерен скенер с отворен код, наречен "FabScan", който между другото е разработен като бакалавърска теза.
Собствен корпус мозъчен скенерНаправих ги от MDF листове и още няколко крепежни елементи и за да покажа какво получих, реших да напиша това ръководство.
Така че, да тръгваме!
Стъпка 1: Ще ни трябва
Какво препоръчва FabScan:
— Ардуино Уно
- A4988 драйвер за стъпков двигател
— щит за 3D скенера “FabScan”
— 5mW лазерен модул
— биполярен стъпков двигател NEMA 17 (200 стъпки)
— захранване 12V, 1A
— Уеб камера Logitech C270
— материал за корпуса (4 листа MDF 60x30x0.5cm, повече подробности тук)
Какво използвах:
- Arduino Uno
— NEMA 17 стъпков двигател (200 стъпки)
— L298N драйвер за стъпков двигател
— 5mW лазерен модул (червен лъч)
— захранване 12V, 2A
— Уеб камера Logiteck C270




Стъпка 2: Създаване на корпуса









Изрязахме частите на тялото от MDF, използвах Dremel за тези цели и го сглобихме. Тази процедура не е проста, тъй като за правилно сканиране мозъчна камера, моторът и лазерният модул трябва да бъдат позиционирани правилно.
Стъпка 3: Свързване на електроника


Това е съвсем просто: монтираме FabScan щита на Arduino, а на щита инсталираме драйвера в първия конектор за двигателя. Свързваме стъпков двигател към изходните контакти и лазерен модулкъм аналогов щифт A4 и накрая свържете захранващия и USB кабела. Повече подробности за това.
Ако използвате компоненти от моя списък, тогава трябва да свържете драйвера L298 към щифтове 10, 11, 9, 8 на Arduino (можете да ги промените, ако желаете), а лазерният модул също към щифт A4. След това свържете захранващия и USB кабела.
Стъпка 4: Код
Ето кода за занаятиот екипа за разработка и които могат да бъдат заредени в Arduino директно от браузъра с помощта на плъгина Codebender. За да направите това, трябва да инсталирате този плъгин и да щракнете върху бутона „Run on Arduino“, като по този начин стартирате „fill“ директно от прозореца на кода.
Забележка: Ако използвате опцията „Опитайте Ubuntu“, не забравяйте да се уверите, че вашите файлове са запазени, преди да изключите компютъра си!
Въз основа на горните снимки изпълнете следните стъпки:
— изберете сериен порт(Сериен порт)
— настройте камерата
- след това "Файл" - "Контролен панел"
- стартирайте детектиране на лазер, без още да поставяте нищо в принтера, и изберете „разреши“
- Щракнете върху „Извличане на рамка“ и се уверете, че синята хоризонтална линия докосва горната част на грамофона, а жълтата хоризонтална линия докосва дъното на грамофона. Жълто вертикална линиятрябва да минава през центъра на кръглата въртяща се маса. Неподравнена камера ще произведе изкривени сканирания!
След настройка затворете прозореца на контролния панел, поставете обекта в скенера и щракнете върху бутона „Стартиране на сканирането“.
Съвет: Можете да промените конфигурационния файл от екипа за разработка на configuration.xml, следвайки представените.
Запазване на полученото 3D изображение:
Кога сканиране на мозъкаСлед като бъде завършено, полученото 3D изображение може да бъде запазено в 3D pointcloud .pcd или .ply файлов формат. Можете също да го запазите като 3D stl файл, но не работи на всички платформи. Можете да отворите файл със сканиран обект, като изберете „Файл“ - „OpenPointCloud“.
— уверете се, че файлът със сканирането има разширение .ply
— отворете файла в MeshLab и изчислете нормалите (Filters/Point Set/Compute normals for point sets)
— ние пресъздаваме повърхностите с помощта на реконструкция на Поасон (Филтри/Набор от точки/Реконструкция на повърхността: Поасон).
Това е всичко! И на всички успех на мозъка!
) решихме да се опитаме да го сглобим и, ако е възможно, да подобрим дизайна му. Дори не можехме да си представим какво ще излезе от него, още по-малко да си представим, че ще спечелим няколко научни и инженерни изложения с него. Но по ред. Който се интересува от резултата, добре дошъл в котката (много снимки).
Първи прототип
Първо решихме да направим лазерен далекомер. Направена е по статия в радиолюбителски форум. Само лазерна показалка и камера. На Java е написана програма за обработка на изображения. За едно измерване бяха направени две снимки: със и без лазер. След като ги сравнихме, определено можехме да намерим лазерната точка. След като това проработи, далекомерът беше монтиран на платформа, която можеше да се върти в две равнини. Преди да ви покажа какво имам, трябва да ви предупредя - в лятното училище няма много материали, така че съставихме прототип от това, което имахме:
Камерата се вижда веднага, а лазерът е този месингов цилиндър над нея. За да завъртим платформата, използвахме два стъпкови двигателя, които от своя страна бяха свързани към контролна платка на микроконтролер Atmega32. Лазерът беше свързан към него. Самата платка беше свързана към компютъра чрез USB->UART адаптер. Програмата на компютъра правеше снимки, обработваше ги, въвеждаше координатите на получените точки във файл и изпращаше команди към контролното табло.
Резултатът беше интересен. Да, намерихме разстоянието. Да, можем да „целим“ всяка точка в полусферата над скенера. И радостта ни нямаше граници. Но когато преценихме времето за сканиране на това полукълбо, то се оказа 48 часа. И не става въпрос за камерата. И дори не в Java. Проблемът беше, че инсталацията беше толкова крехка, че се клатеше след всяко завъртане в продължение на пет секунди. Трябваше да направя измерване, да се обърна и да изчакам пет секунди, докато спре да се люлее. Освен това библиотеката за камерата я включваше и изключваше преди всяка снимка. Това отне 1-2 секунди. Но лятното училище свършваше и нямаше време да го преработим: вече беше вечерта преди проектът да трябва да бъде готов. Или по-скоро сутрин. На следващия ден представихме проекта си на конкурс пред научно жури и неочаквано спечелихме. Вероятно заради тази победа решихме да продължим работата си по този проект.
Втора версия
Всъщност лятото свърши и учебната година започна. Изчезна желанието за работа. Инсталацията беше планирана да бъде завършена до следващото състезание, което беше след цял месец. месец. И тогава изведнъж три дни. Но след месец решихме да променим обстановката. Сглобете го плътно, монтирайте леща върху лазерната показалка, която ще създаде лазерна линия. Това би позволило сканиране на 720 точки наведнъж (скенерът имаше HD камера). Само три дни направиха своите корекции:
Вторият скенер е сглобен от пластмасови линийки, лепило, маскираща лента и се държи на място само със синя електрическа лента. Вместо леща има епруветка. Зелен лазер свети върху тази епруветка. Отразеният лъч създава повече или по-малко равномерна лазерна ивица върху екрана. Далекомерът е прикрепен само към един двигател, който го върти в хоризонтална равнина. Контролната платка е сменена с STM32VLDiscovery. Просто познавам STM32 по-добре и освен това Atmega изгоря и програмистът беше изгубен отдавна. Не изглежда много добре, но работи! Вибрациите намаляха и съответно скоростта се увеличи. Но не много. Тук беше открита много интересна уловка - китайската лазерна показалка не се включи веднага, а постепенно увеличи мощността си в продължение на секунда. Така секунда за осцилиране, секунда за загряване на лазера, секунда за снимане и те са две. Така че получаваме 4 секунди. Но при едно измерване откриваме разстояния до 720 точки! Процесът на сканиране изглеждаше така:
И резултатът е такъв:
Снимката не изглежда много интересна, но халбата беше обемна в програмата. Можете да го погледнете от различни ъгли.
Каква е реалната конкуренция? Но нищо! Сканирахме всичко в 4 сутринта, а в 9 сутринта на щанда установихме, че лазерът е изгорял. Както се оказа, докато го пренасяхме от хотела до щанда, в него попадна дъжд и когато се включи, изгоря. И когато не работи, изглежда толкова зле, че е трудно да се повярва на думите „работеше преди 5 часа“. Бяхме разстроени. Желанието да продължим изчезна заедно с дима от лазера. Но все пак беше събрано...
Трета версия
И беше сглобен отново за състезанието. Още повече, че се готвихме дълго и старателно. Повече от седмица. И ето го резултата:
Първото нещо, което хваща окото ви е, че сега сканираме не зоната около скенера, а обект, който се върти на платформата. Получихме и необходимия обектив, сглобихме всичко правилно, пренаписахме програмата и също така заменихме платката за отстраняване на грешки с домашно направена. И сега правим само една снимка на измерване. Лазерът е достатъчно мощен и обективът е достатъчно добър, за да локализира уникално лазера на снимка. Благодарение на това не чакаме лазера да загрее - той винаги е включен. И сега включваме камерата само веднъж. Тоест времето се изразходва най-вече за завъртане на платформата и обработка на изображението. В програмата е добавено меню за избор на точност. Времето за сканиране е от две до десет минути. В зависимост от избраната точност. С максимална точност се оказва, че платформата се върти с 0,5 градуса на стъпка, а разстоянието се определя с точност до 0,33 мм. Платформата се задвижва от стъпков двигател чрез скоростна кутия. Самата платформа е голям диск, а гумената ролка на вала на двигателя е малка. Моторът и лазерът се управляват от микроконтролер STM32F050F4 чрез транзистори с полеви ефекти. В самото начало на статията е сканирано изображение на играчката, получено с помощта на този скенер. Тъй като скенерът създава облак от точки във формат .obj, след триангулация можем да отпечатаме сканирания обект на 3D принтер, както се вижда на същата снимка. На екрана можем да видим модела след триангулация. По модела не е извършвана ръчна работа.
Спечелихме състезанието. И той даде вход за международното състезание Intel ISEF. Така че започнахме да работим върху следващия скенер.
Четвърта версия
В момента това е най-новата версия на скенера, която сме събрали. За сравнение има втора версия на платформата. Опитахме се да подходим към разработването на четвъртия скенер възможно най-задълбочено. Инсталацията е начертана в CAD, частите са изрязани с лазер, всичко е боядисано, нищо излишно не стърчи отвън. Промени: Платформата вече всъщност е зъбно колело. Тя е изрязана от плексиглас и има 652 зъба по краищата. Това решава проблем, който сериозно повреди сканирането в предишния скенер: гумената ролка се плъзгаше малко, поради което платформата често не се въртеше на 360 градуса. Сканиранията бяха или „изрязани“, или припокрити. Тук винаги сме знаели колко точно е завъртяна платформата. Мощността на лазера се регулира чрез софтуер. Благодарение на това беше възможно да се променя мощността на лазера в движение, като се избягва осветяването на ненужни части при условия на слаба светлина. За да контролираме цялата електроника, решихме да не създаваме нова платка, а просто да използваме F401RE-Nucleo за отстраняване на грешки. Има инсталиран ST-LinkV2.1, който работи като дебъгер и USB->UART адаптер.
Точността беше невероятна: Ъглова разделителна способност 0,14 градуса. На разстояние 0,125 мм. Областта на сканиране е цилиндър с височина 20 см и диаметър 30 см. Цената на всички части и лазерно рязане по време на създаването му (май 2014 г.) е по-малко от 4000 рубли.
По време на употреба ние го настройваме на максимална точност само веднъж. Скенерът продължи 15-20 минути. Получихме почти 2 милиона точки. Лаптопът отказа да изчисли модела от облака от точки. Експериментът не е повторен.
Заключение
В близко бъдеще планираме да възобновим работата по проекта и затова ще финализираме както програмата, така и инсталацията. Надявам се, че в близко бъдеще ще пишем за поетапно сглобяване, публикуване на чертежи, програми и всичко останало. Това вече няма да се вписва в тази статия.Благодаря на всички, които прочетоха до края!
UPD:
Един колега намери видеоклип за работата на скенера, който заснехме в ISEF:
Да, по-голямата част от видеото не е интересно, но накрая има модел на лаптоп.
А ето и примери за сканирани обекти. Но всички те принадлежат към третата версия на скенера.
Dropbox
Във файла model.obj можете ясно да видите какво се случва, когато тази гумена ролка се плъзне по мотора - кучето има три очи. Сканирането беше спряно, причинявайки прекъсване. Всички файлове са облаци от точки. Можете да го отворите с помощта на MeshLab. Моделите не са обработвани на ръка. Напълно необработени данни. Отгоре можете да видите „бели петна“ - области без точки. Камерата не ги вижда. Бели петна могат да се видят и на други места. Те се появяват или в области, които са твърде тъмни, или когато повърхностите се припокриват. Например във файла stn_10.obj рогата на козата се припокриват, поради което вътрешната повърхност на рогата не е сканирана.
Здравейте всички, компанията 3Dtool е тук.
В съвременния свят всички разработки на нови устройства и прототипи се извършват по различни начини CAD-системи. Цялото проектиране, както техническите продукти, така и дизайнерските работи, се извършва по електронен път. 3D моделите за всичко по света вече са утвърдена реалност. Ето защо, за да се улесни създаването на 3D модели, на пазара се появиха 3D скенери.
3D скенерите са устройства, които много точно създават триизмерно копие на всеки физически обект. И днес ще ви разкажем за 5-те най-добри 3D скенери според нашата версия, на които трябва да обърнете внимание.
Това е настолен 3D скенер, разработен от Блестящо 3D. Фирмата е специализирана в производството на 3D скенери за широк спектър от задачи. Продажбите се извършват по целия свят.
За сканиране този скенер използва 2 камери с резолюция 1,3 мегапиксела.
Базовият пакет на 3D скенера включва автоматична въртяща се маса. Което образува единен хардуерен и софтуерен комплекс.
Точност на сканиране на обекти до 0,1 mm.
Скенерът може също да работи в режим на улавяне на текстура (т.е. сканиране в цвят).
Има 2 режима на сканиране: автоматичен (с въртяща се маса) и фиксиран (без въртяща се маса).
При работа в автоматичен режим с въртяща се маса 3D скенерът може да сканира обекти с размери до 200x200x200 mm.
С помощта на функцията за фиксирано сканиране можете да сканирате големи обекти с размери до 700x700x700 mm, но без въртящо се устройство.
Скенер EinScan SEсканира обект, като проектира последователност от бели светлинни лъчи върху обекта, камерите от своя страна улавят всички неравности по повърхността на сканирания обект и създават 3D модел в софтуера на 3D скенера онлайн.

- Сканиращ модул (камери и проектор)
- Ротационна сканираща маса
- Поле за калибриране за първоначалната настройкаскенер
- Основа за поставяне на елементи на скенера
- Софтуер на руски

- Лесен за използване
- Максимално автоматизиран
недостатъци:
- Не висока точност
- Необходимостта от използване на видеокарта NVIDIA.

Това е универсален, полупрофесионален 3D скенер, който е подходящ за сканиране на обекти от 5 см до 3 метра.
При сканиране се използва принципът на структурираното осветление.
3D скенерът има три вградени зони за сканиране, благодарение на които потребителят може оптимално да конфигурира параметрите на сканиране за обекти с различни размери. Ако е необходимо, можете да комбинирате няколко зони за сканиране: например, ако голям обект има малка площ с малки детайли, които изискват висока детайлност, той може да бъде сканиран със зона № 3, докато самият обект може да бъде сканиран със зона №. 1.
3D скенер RangeVision Spectrumможе да работи в три режима на сканиране:
- Използване на маркировки (които могат да се прилагат както върху самия сканиран обект, така и върху повърхностите около него)
- Сканиране с помощта на ротатор (таблица)
- Сканиране без ротатор и без белези.
Скенерът се доставя с един комплект лещи с ръчна настройказа три зони на сканиране

3D RangeVision спектър- позволява получаване на 3D модели на обекти с точност от 0,04 до 0,12 mm. Подходящ е и за изпълнение на инженерни задачи, където точността му е достатъчна.

Отделно бих искал да отбележа усъвършенствания (експертен) софтуер. Това е собствена разработка на компанията RangeVision. Софтуерът е включен в 3D скенера и производителят не начислява пари за подновяване или актуализация на лицензи. Тя ви позволява да извършвате както последваща обработка на модела след сканиране, така и много фино настройване на скенера към сканирания обект.

Комплектът включва въртяща се маса, която ви позволява лесно да сканирате малки обекти с тегло до 5 кг в автоматичен режим. Можете също да сканирате обекти до 3 метра без грамофон.
Предимства:
- Високо качество на сканиране
- Голям диапазон на сканиране от 5см до 3м
недостатъци:
- развитие софтуерще отнеме време. Въпреки това от 10 юли 2018 г. RangeVision пусна нова версияСофтуер, който стана значително по-прост.

Това е ръчен 3D скенер за сканиране на обекти от 5 см до 4 метра. Максимална точност на сканиране до 0,05 mm ( 50 микрона). Скорост на сканиране: 550 000 точки/секунда.
3D скенерът е подходящ както за сканиране на хора, така и за неодушевени обекти.
Скенерът има следните режими на работа:
- Ръчно HD сканиране(режим на ръчно сканиране с с висока резолюция). Точността на сканиране в този режим е 0,1 mm. Сканирането изисква маркери (доставени). Цветното сканиране не е възможно. Този режим е необходим за решаване на проблеми със сканиране на големи обекти с висока точност ръчно управление.
- Ръчно бързо сканиране(режим на бързо ръчно сканиране). Оптимален режим за сканиране на хора. Точност на сканиране 0,3 мм. Възможно е цветно сканиране (ако е наличен модул за цветно сканиране). Този режим е подходящ за бързо сканиране на големи обекти.
- Автоматично сканиране (Автоматичен режим). Сканирането се извършва с помощта на въртяща се маса. Точност на сканиране до 0,05 мм (50 микрона). Подходящ за сканиране на малки обекти в автоматичен режим.



4. Фиксирано сканиране(Фиксиран режим). Сканирането става с помощта на статив и маркери. Маркерите се залепват на случаен принцип върху сканирания обект. Обектът се върти ръчно или чрез преместване на триножник със скенер около обекта. Точност на сканиране 0,05 мм (50 микрона).


3D скенер Shinig3D Einscan Pro Plus може допълнително да се оборудва със следните модули: модул за цветно сканиране, индустриален пакет (трипод и въртящо се устройство).
След сканиране операторът получава файлове в следните формати: OBJ,STL,ASC,PLY. Тези формати са подходящи за всички съществуващи 3D принтери, CNC машини или 3D редактори. Няма да има проблеми със съвместимостта.
3D скенер Einscan Pro Plusима висока мобилност и има възможно най-просто управление. При създаването му е обърнато специално внимание на възможността за работа със скенера от необучени хора. Следователно всички негови процеси са максимално автоматизирани.
Софтуерът се доставя със скенера - безплатно.
Предимства:- 4 режима на работа
- Сравнително ниска цена
- Автоматизация на процесите
- Лекота на използване
недостатъци:
- За работа е необходим компютър за игри с видеокарта. NVIDIA
- Сканирането на черни, блестящи, искрящи обекти изисква покритие от матов спрей.

Това е 3D скенер, базиран на структурирано осветление - идеален избор, ако трябва да създадете 3D модел на средно голям обект в цвят, например: човек, броня на автомобил.
Артек Ева -преносим 3D скенер широко приложение, което го прави лидер на пазара на професионални ръчни 3D скенери. Работата на устройството се основава на технология за безопасно структурирано осветление. Това е отлично универсално решение за снимане на всякакви обекти, включително обекти с черни и лъскави повърхности.

Този скенерне изисква калибриране, т.к вече е фабрично калибриран.
Точност на сканиране до 0,1 мм. Точността на позициониране на 3D точката е 0,5 mm.
Скенерът е оборудван с камера 1.3 MPix.
Поддържа се режим на цветно сканиране.

Скорост на сканиране до 2 милиона. точки в секунда, поради което сканирането става много бързо.
Предимства:- Високоскоростно 3D сканиране
- Възможност за работа на открито (на открито)
- Сканира черни и лъскави обекти.
недостатъци:
- За да работи, е необходима видеокарта за игри
- Цена на решението

Професионален скенер, който позволява триизмерна дигитализация както на големи, така и на малки физически обекти. 3D скенерът има три зони за сканиране, които ви позволяват да дигитализирате както бижута, така и елементи от каросерията на автомобила с необходимата детайлност и точност.

Потребителят може да извърши 3D сканиране с помощта на спомагателни маркери, според които софтуерът може автоматично да „сглобява“ и комбинира сканиранията. В допълнение, благодарение на поддръжката на маркери и възможността за импортиране на референтни мрежи, генерирани от фотограметрични производствени системи GOMИ Aicon, точност на сканиране до 0,05 mm на обекти над 2 m.

Ако обаче имате работа с музейни експонати или други предмети, които изискват специални грижи, 3D скенер RangeVision PRO5Mще ви позволи да сканирате без маркери и да изградите 3D модел въз основа на геометрията на самия обект.
3D скенер RangeVision PRO5M, работещ със структурирано осветление, се сравнява благоприятно с подобни 3D лазерни скенери по отношение на скоростта на сканиране.
Този скенер е оборудван с камери 5 MPи идва с отделен набор от предварително конфигурирани лещи за всяка област на сканиране.
Освен това се поддържа технология за синя подсветка, която намалява влиянието на външното осветление.
Времето за сканиране е само 15 секунди.
Основно оборудване:
- Сканиращ модул,
- 2 индустриални камери
- Комплект лещи за всяка област на сканиране
- Статив с въртяща се глава
- Комплект плочи за калибриране
- Матиращ спрей
- Софтуер.
Предимства:
- Високо качество и скорост на сканиране
- Голям обхват на сканиране от 5 cm до 5 m
- Професионален софтуер
- Автоматично сканиране с помощта на въртяща се маса и маркери.
- Безплатни софтуерни актуализации
недостатъци:
- Овладяването на софтуера ще отнеме време
- Не е подходящ за сканиране от хора
Всички 3D скенери, представени в тази статия, могат да бъдат закупени от нашата компания. Каталог на 3D скенери
И се абонирайте за нашите групи в социалните мрежи:
- развитие софтуерще отнеме време. Въпреки това от 10 юли 2018 г. RangeVision пусна нова версияСофтуер, който стана значително по-прост.