Частотний метод синтезу сау. Синтез сау методом логарифмічних частотних характеристик
Надіслати свою гарну роботу до бази знань просто. Використовуйте форму нижче
Студенти, аспіранти, молоді вчені, які використовують базу знань у своєму навчанні та роботі, будуть вам дуже вдячні.
Розміщено на http://www.allbest.ru//
Розміщено на http://www.allbest.ru//
Міністерство освіти та науки Російської Федерації
ФДБОУ ВО Іванівський державний хіміко-технологічний університет Технічної кібернетики та автоматики.
КУРСОВА РОБОТА
З дисципліни: Теорія автоматичного керування
Тема: Синтез систем автоматичного керування
Іваново 2016
Перехідна функція об'єкта керування
Табл.1. Перехідна функція об'єкта керування.
Анотація
У цій роботі об'єктом дослідження є стаціонарний інерційний об'єкт із запізненням, представлений перехідною функцією, а також системою управління ним.
Методами дослідження є елементи теорії автоматичного керування, математичного та імітаційного моделювання.
За допомогою методів ідентифікації, апроксимації та графічного методу були отримані моделі об'єктів у вигляді передавальних функцій, була встановлена модель, яка найточніше описує заданий об'єкт.
Після вибору моделі об'єкта було здійснено розрахунки параметрів налаштування регулятора методами Циглера-Нікольса та розширених частотних характеристик.
Для визначення методу, при якому були знайдені кращі налаштування регулятора замкнутої системи автоматичного управління, було проведено її моделювання в середовищі Matlabза допомогою пакета Simulink. За результатами моделювання був обраний метод, за допомогою якого були розраховані налаштування регулятора, що найкраще задовольняють заданий критерій якості.
Також було зроблено синтез системи управління багатовимірним об'єктом: каскадна система управління, комбінована система управління, автономна система управління. Були розраховані параметри налаштування ПІ-регуляторів, компенсаторів, отримані відгуки на типові впливи.
Список ключових слів:
Об'єкт керування, регулятор, параметри налаштування, система регулювання.
Відомості про обсяг:
Обсяг роботи-сторінок
Кількість таблиць-
Кількість ілюстрацій-32
Кількість використаних джерел-3
Вступ
У цій роботі вихідними даними є перехідна функція об'єкта управління по одному з динамічних каналів. Необхідно провести параметричну ідентифікацію об'єкта, заданого перехідною функцією графічним методом, методами апроксимації та ідентифікації.
З отриманих даних, встановлюємо, яка модель точніше описує заданий об'єкт. Вирішення цього завдання є досить актуальною проблемою, оскільки найчастіше ми маємо не саму математичну модель, а лише її криву розгону.
Після вибору моделі об'єкта робимо розрахунок параметрів ПІ-регулятора. Розрахунок проводимо за допомогою методів Циглера-Нікольса та розширених частотних характеристик. Для того, щоб визначити за яким методом було знайдено найкращі налаштуваннярегулятора, використовуємо як критерій якості ступінь загасання процесу.
У цій роботі проведено синтез системи управління багатовимірним об'єктом трьох типів: автономну, каскадну, комбіновану. Розраховано параметри налаштування регуляторів, досліджено відгуки системи різними каналами на типові впливи.
Ця курсова робота є навчальною. Навички, отримані в ході виконання, можуть бути використані в ході виконання курсової роботиз моделювання систем управління та випускної кваліфікаційної роботи.
1. Ідентифікація об'єкта управління
1.1 Ідентифікація з використанням програми System Identification ToolBox
Ідентифікація - це визначення взаємозв'язку між вихідними та вхідними сигналами на якісному рівні.
Для ідентифікації використовуємо пакет System Identification ToolBox. Побудуємо модель у simulink.
Рис.1.1.1. Схема щодо ідентифікації.
За допомогою команди ident, заходимо до System Identification ToolBox.
Рис.1.1.2. System Identification ToolBox.
Імпортуємо дані до System Identification ToolBox:
Рис.1.1.3. Імпорт даних
Отримуємо коефіцієнти передавальної функції:
Рис.1.1.4. Результати ідентифікації
К = 44,9994 Т = 9,0905
1.2 Апроксимація з використанням Curve Fitting Toolbox
Апроксимація або наближення-це метод, що дозволяє досліджувати числові характеристики та властивості об'єкта, зводячи завдання до вивчення більш простих або зручніших об'єктів.
Для апроксимації використовуємо пакет Curve Fitting Toolbox. Будуємо модель у simulink без ланки запізнення.
Рис.1.2.1. Схема щодо апроксимації.
За допомогою команди cftool заходимо до Curve Fitting Toolbox. По осі х вибираємо час, а по осі у вихідні значення. Описуємо об'єкт функцією a-b*exp(-c*x). Отримуємо коефіцієнти a,bта с.
Рис.1.2.2. Результати апроксимації.
К = (a + b) / 2 = 45 Т =
1.3 Апроксимація елементарними ланками (графічний метод)
Рис.1.3.1. Графічний метод
Визначаємо час запізнення. Щоб визначити, проводимо пряму від усталеного значення до осі ординат. Щоб визначити постійну часу, проводимо дотичну до кривої до перетину з прямої значення, що встановлено, з точки перетину проводимо перпендикуляр до осі абсцис, з отриманого значення віднімаємо час запізнення.
К = 45 Т = 47
1.4 Порівняння перехідних функцій
Для порівняння трьох методів обчислимо помилку кожного методу, знайдемо суму квадратів помилок, знайдемо дисперсію. Для цього побудуємо модель simuling і підставимо отримані параметри.
Рис.1.4.1. Порівняння перехідних функций.
Трьома методами отримано параметри передавальної функції об'єкта дослідження. Критерієм оцінки отримуваної математичної моделі об'єкта служить дисперсія помилки і за цим показником найкращі результатизазначені у методі апроксимації за допомогою Curve Fitting Tool. Далі за математичну модель об'єкта приймаємо: W=45/(1/0,022222+1)*e^(-22,5p).
2.Вибір закону регулювання
Виробляємо вибір регулятора із співвідношення
Так як вибираємо ПІ-регулятор.
3. Синтез САУ одновимірним об'єктом
3.1 Розрахунок САУ методом Циглера-Нікольса
Метод Циглера-Нікольса ґрунтується на критерії Найквіста. Суть методу полягає у знаходженні такого пропорційного регулятора, який виводить замкнуту систему на межу стійкості, та знаходження робочої частоти.
Для даної передавальної функції знайдемо фазо-частотну характеристику та постоїмо її графік.
Визначимо робочу частоту як абсцис точки перетину ФЧХ с.Робоча частота дорівнює 0,082.
Мал. 3.1.1 Знаходження робочої частоти
Розрахуємо параметри налаштування ПІ-регулятора. Розраховуємо коефіцієнт Kкр:
З отриманого значення розраховуємо коефіцієнт пропорційності:
Розраховуємо час ізодрому:
Знайдемо відношення:
Мал. 3.1.2 Реакція системи каналом управління на ступінчасту функцію
Мал. 3.1.3 Реакція системи каналом обурення на ступінчасту функцію
Мал. 3.1.4 Реакція системи каналом обурення на імпульсну функцію
Мал. 3.1.5 Реакція системи каналом управління на імпульсну функцію
Розрахуємо ступеня згасання за формулою:
Знаходимо середнє значення ступеня згасання 0,93 і порівнюємо із дійсним значенням 0,85.
3.2 Розрахунок САУ шляхом розширених частотних показників
Цей метод повністю заснований на використанні модифікованого критерію Найквіста (критерій Є. Дудникова), який говорить: якщо розімкнена система стійка і її розширена амплітудно-фазова характеристика проходить через точку з координатами [-1, j0], то замкнута система буде не тільки стійка, але й матиме деякий запас стійкості, що визначається ступенем коливальності.
- (3.2.1) розширена АЧХ розімкнутої системи;
-(3.2.2) розширена ФЧХ розімкнутої системи.
Для ПІ-регулятора розширені частотні характеристики мають вигляд:
Розрахунок у середовищі Mathcad:
для Ш = 0.85 м = 0.302
Зробимо розрахунок налаштування ПІ-регулятора в середовищі Mathcad:
Перейдемо до області розширених частотних характеристик об'єкта. Для цього зробимо заміну:
Перейдемо до області розширених частотних характеристик регулятора:
Розширена амплітудно-частотна характеристика регулятора:
Розширена фазо-частотна характеристика регулятора:
Після деяких перетворень рівняння (3.2.6) отримуємо:
Побудуємо графік:
Рис.3.2.1 Параметри налаштувань за допомогою методу розширених частотних характеристик
З графіка обчислюємо максимальне значення Kp/Tu на першому витку і відповідне значення Кр:
Kp = 0,00565 Kp / Tu = 0,00034
Досліджуємо реакцію системи на типові сигнали каналами управління та обурення.
Перехідна функція каналом управління:
Мал. 3.2.2 Реакція системи каналом управління на ступінчасту функцію
Перехідна функція каналом обурення:
Мал. 3.2.3 Реакція системи каналом обурення на ступінчасту функцію
Імпульсна перехідна функція каналом обурення:
Мал. 3.2.4 Реакція системи каналом обурення на імпульсну функцію
Імпульсна перехідна функція каналом управління:
Мал. 3.2.5 Реакція системи каналом управління на імпульсну функцію
Розрахуємо ступеня згасання:
Для перехідної функції каналом управління
Для перехідної функції каналом обурення
Для імпульсної перехідної функції каналом обурення
Для імпульсної перехідної функції каналом управління
Знаходимо середнє значення ступеня згасання 0,98 і порівнюємо із дійсним значенням 0,85.
Методом розширених частотних характеристик та методом Циглера-Нікольса були розраховані параметри налаштування ПІ-регулятора, ступеня згасання. Отримане методом Циглера-Никольса середнє значення ступеня згасання перевищує справжнє на 9,41%. Середнє значення ступеня згасання, отримане шляхом розширених частотних показників, перевищило справжнє на 15,29%. З цього випливає, що краще використовувати значення, набуті методом Циглера-Нікольса.
4. Синтез систем автоматичного керування багатовимірним об'єктом
4.1 Синтез каскадних систем управління
Каскадні системи застосовують для автоматизації об'єктів, що мають велику інерційність по каналу регулювання, якщо можна вибрати менш інерційну по відношенню до найбільш небезпечних обурення проміжну координату і використовувати для неї той самий регулюючий вплив, що і для основного виходу об'єкта.
Мал. 4.1.1 Каскадна система керування
В цьому випадку в систему регулювання включають два регулятори - основний (зовнішній) регулятор, який служить для стабілізації основного виходу об'єкта y, і допоміжний (внутрішній) регулятор, призначений для регулювання допоміжної координати y1. Завданням для допоміжного регулятора є вихідний сигнал основного регулятора.
Розрахунок каскадної АСР передбачає визначення налаштувань основного та допоміжного регуляторів при заданих динамічних характеристиках об'єкта по основному та допоміжному каналам. Оскільки налаштування основного та допоміжного регуляторів взаємопов'язані, розрахунок їх наводять методом ітерацій.
На кожному кроці ітерації розраховують наведену одноконтурну АСР, в якій один із регуляторів умовно відноситься до еквівалентного об'єкта. Еквівалентний об'єкт для основного регулятора є послідовним з'єднанням замкнутого допоміжного контуру і основного каналу регулювання; передатна функція його дорівнює:
(4.1.1.)
Еквівалентний об'єкт для допоміжного регулятора є паралельним з'єднаннямдопоміжного каналу та основної розімкнутої системи. Його передатна функція має вигляд:
(4.1.2.)
Залежно від першого етапу ітерації розрізняють два способи розрахунку каскадних АСР:
1-й спосіб. Розрахунок починають із основного регулятора. Метод використовують у випадках, коли інерційність допоміжного каналу набагато менше, ніж основного.
На першому кроці приймають припущення, що робоча частота основного контуру набагато менше, ніж допоміжного. Тоді:
(4.1.3.)
Таким чином, у першому наближенні налаштування основного регулятора не залежать від налаштувань допоміжного регулятора та знаходяться по WЕ0осн(р).
На другому кроці розраховують параметри допоміжного регулятора для еквівалентного об'єкта.
У разі наближених розрахунків обмежуються першими двома кроками. При точних розрахунках їх продовжують доти, доки налаштування регуляторів, знайдені у двох послідовних ітераціях, не співпадуть із заданою точністю.
2-й спосіб. Розрахунок починають із допоміжного регулятора. На першому кроці припускають, що зовнішній регулятор вимкнено, тобто:
Таким чином, у першому наближенні налаштування допоміжного регулятора знаходять по одноконтурній АСР для допоміжного каналу регулювання. На другому кроці розраховують налаштування основного регулятора щодо передавальної функції еквівалентного об'єкта WЕ1осн(р) з урахуванням налаштувань допоміжного регулятора. Для уточнення налаштувань допоміжного регулятора розрахунок проводять за передатною функцією, яку підставляють знайдені налаштування основного регулятора. Розрахунки проводять до тих пір, поки налаштування допоміжного регулятора, знайдені у двох послідовних ітераціях, не співпадуть із заданою точністю.
Розрахуємо параметри допоміжного ПІ-регулятора:
Рис.4.1.2. Реакція на ступінчасту дію по каналу управління
Рис.4.1.3. Реакція на ступінчасту дію по каналу обурення
Рис.4.1.4. Реакція на імпульсний вплив каналом управління
Рис.4.1.5. Реакція на імпульсний вплив каналом обурення
Система коваріантна завданню та інваріантна обуренню. Виконується основний критерій якості-вид перехідного процесу. Другий критерій якості як часу регулювання не виконується. Виконується критерій динамічної помилки.
4.2 Синтез комбінованої системи управління
Існує випадок, коли до об'єкта додаються жорсткі дії, які можна виміряти, але пропонується не одноконтурна система управління, а так звана комбінована система, яка є комбінацією двох принципів – принципу зворотного зв'язку та принципу компенсації збурень.
Пропонується перехоплювати обурення раніше за їх вплив на об'єкт і за допомогою допоміжного регулятора компенсувати їх дії.
Рис.4.2.1. Комбінована система керування
Застосовуємо схему, наведеної на Рис. 4.2.1, умова інваріантності вихідної величини y по відношенню до обурювального впливу yв:
Принцип інваріантності до обурення: щоб система була інваріантною до обурення, її передатна функція по каналу управління повинна дорівнювати нулю. Тоді передатна функція компенсатора запишеться:
(4.2.2.)
Розрахуємо ПІ-регулятор в Mathcad регулятора за допомогою стандартних біномних форм Ньютона:
Ступінчаста дія по каналу управління:
Рис.4.2.2. Реакція на ступінчасту дію по каналу управління
Ступінчаста дія по каналу обурення:
Рис.4.2.3. Реакція на ступінчасту дію по каналу обурення
Імпульсний вплив по каналу управління:
Рис.4.2.4. Реакція на імпульсний вплив каналом управління
Імпульсний вплив по каналу обурення:
Рис.4.2.5. Реакція на імпульсний вплив каналом обурення
Система коваріантна завданню та інваріантна обуренню. Критерій якості як часу регулювання не виконується. Критерій динамічної помилки не виконується. Система інваріантна обуренню в статиці, але неінваріантна в динаміці через інерційні властивості, що входять до неї елементів.
4.3 Синтез автономної системиуправління
При управлінні багатовимірними об'єктами ми часто зустрічаємося з наступною картиною:
Мал. 4.3.1 Об'єкт управління з двома вхідними та двома вихідними змінними
X1,X2 - керуючі змінні
Y1,Y2 - керовані змінні
U1,U2 - прямі зв'язки
P1, P2 – перехресні зв'язки.
Якщо для вихідної змінної y1 вибрати як регулюючу змінну змінну x2, то за рахунок перехресних каналів регулююча змінна x2 впливатиме через передатну функцію W21 на змінну y1, а регулююча змінна x1 впливатиме через W12 на y2. Ці обставини суттєво ускладнюють розрахунок такого роду системи.
Завдання розрахунку значно спрощується, якщо система накласти додаткові вимоги - вимоги автономності каналів регулювання. Автономність каналів регулювання можна здійснити за рахунок введення додаткових зв'язків між вхідними змінними, такі пристрої називаються компенсаторами.
Мал. 4.3.2 Система керування двовимірним об'єктом
Внаслідок введення компенсаторів з'явилися нові регулюючі змінні, які впливають на вихідні змінні з урахуванням компенсаційних впливів.
Розраховуємо передавальні функції компенсаторів:
Розраховуємо параметри налаштування ПІ-регуляторів за допомогою стандартних біномінальних форм Ньютона.
Розрахуємо перший ПІ-регулятор у Mathcad:
Розрахуємо другий ПІ-регулятор у Mathcad:
Перехідна функція першого каналу управління:
Мал. 4.3.3. Реакція системи на ступінчасту дію
Перехідна функція другого каналу управління:
Мал. 4.3.4. Реакція системи на ступінчасту дію
Система коваріантна завданню та інваріантна обуренню. Виконується основний критерій якості-вид перехідного процесу. Виконується другий критерій якості як часу.
Висновок
У першому пункті були розглянуті методи, що застосовуються для ідентифікації функції, заданих таблично. Було розглянуто три методи: метод ідентифікації з використанням System Identification ToolBox, метод апроксимації з використанням пакету Curve Fitting Toolbox та метод апроксимації елементарними ланками. За результатами апроксимації було обрано найбільш адекватну модель. Це виявилася модель, отримана апроксимацією за допомогою Curve Fitting Tool.
Потім було визначено закон регулювання та зроблено розрахунки налаштувань ПІ-регулятора двома методами: методом розширених частотних характеристик та методом Циглера-Нікольса. При порівнянні ступенів згасання визначили, що краще використовувати значення, набуті методом Циглера-Нікольса.
Четвертий пункт курсової роботи полягав у моделюванні систем. Ми провели синтез систем керування багатовимірним об'єктом. Для цих систем було розраховано компенсатори збурень, і навіть ПІ-регулятори, для розрахунку яких застосовувалися стандартні біномні форми Ньютона. Були отримані реакції систем на типові вхідні дії.
Список використаних джерел
Теорія автоматичного управління: підручник для вузів/В. Я. Ротач. - 5-те вид., перероб. та дод. - М.: Видавничий дім МЕІ, 2008. - 396 с., Іл.
Модальне управління та спостерігаючі пристрої / Н.Т. Кузівки. – М.: «Машинобудування», 1976. – 184 с.
Консультаційний центр Matlab [Електронний ресурс] / / MATLAB.Exponenta, 2001-2014. URL: http://matlab.exponenta.ru. Дата звернення: 12.03.2016.
Розміщено на Allbest.ru
...Подібні документи
Аналіз альтернативного методу розширених частотних показників. Реалізація програми в середовищі MatLab, з метою розрахунку передавальної функції об'єкта управління, параметрів якості перехідного процесу замкнутої САР параметрів налаштування регулятора.
лабораторна робота, доданий 05.11.2016
Метод розширених частотних показників. Огляд вимог щодо показників якості. Комп'ютерні методисинтезу систем автоматичного регулювання серед Matlab. Побудова лінії рівного загасання системи. Визначення оптимальних налаштуваньрегулятора.
лабораторна робота , доданий 30.10.2016
Розрахунок дискретного регулятора, що забезпечує максимальну швидкістьперехідний процес. Формування інтегрального квадратичного критерію. Синтез компенсатора, безперервного та дискретного регулятора, компенсатора, оптимального закону управління.
курсова робота , доданий 19.12.2010
Вибір регулятора для об'єкта керування із заданою функцією передачі. Аналіз об'єкта управління та системи автоматичного регулювання. Оцінка перехідної та імпульсної функцій об'єкта управління. Принципові схемирегулятора та пристрої порівняння.
курсова робота , доданий 03.09.2012
Вибір, обґрунтування типів регуляторів положення, швидкості, струму, розрахунок параметрів їхнього налаштування. Синтез системи регулювання методами модального та симетричного оптимуму. Побудова перехідних характеристик об'єкта регулювання за регульованими величинами.
курсова робота , доданий 01.04.2012
Опис об'єкта автоматичного керування у змінних станах. Визначення дискретної передавальної функції замкнутої лінеаризованої аналого-цифрової системи. Графіки перехідної характеристики, сигналу керування та частотних характеристик системи.
курсова робота , доданий 21.11.2012
Синтез системи керування квазістаціонарним об'єктом. Математична модель нестаціонарного динамічного об'єкта. Передавальні функції ланок системи керування. Побудова бажаних логарифмічних амплітудно-частотних та фазочастотних характеристик.
курсова робота , доданий 14.06.2010
Визначення динамічних показників об'єкта. Визначення та побудова частотних та тимчасових характеристик. Розрахунок оптимальних параметрів налаштування ПІ-регулятора. Перевірка стійкості за критерієм Гурвіца. Побудова перехідного процесу та її якість.
курсова робота , доданий 05.04.2014
Дослідження режимів системи автоматичного керування. Визначення передавальної функції замкнутої системи. Побудова логарифмічних амплітудних та фазових частотних характеристик. Синтез системи об'єкт-регулятор, розрахунок оптимальних параметрів.
курсова робота , доданий 17.06.2011
Формулювання вимог до системи та розрахунок параметрів електроприводу. Синтез регулятора струму. Розрахунок регулятора швидкості. Дослідження перехідних процесів у системі підлеглого управління за допомогою програми Matlab. Синтез релейної системи.
Завдання корекції полягає в підвищенні точності систем як в режимах, що встановилися, так і в перехідних. Вона виникає тоді, коли прагнення зменшити помилки управління в типових режимах призводить до необхідності використання таких значень коефіцієнта посилення розімкнутої САУ, при яких без вживання спеціальних заходів (установки додаткових ланок - пристроїв, що коригують) система виявляється нестійкою.
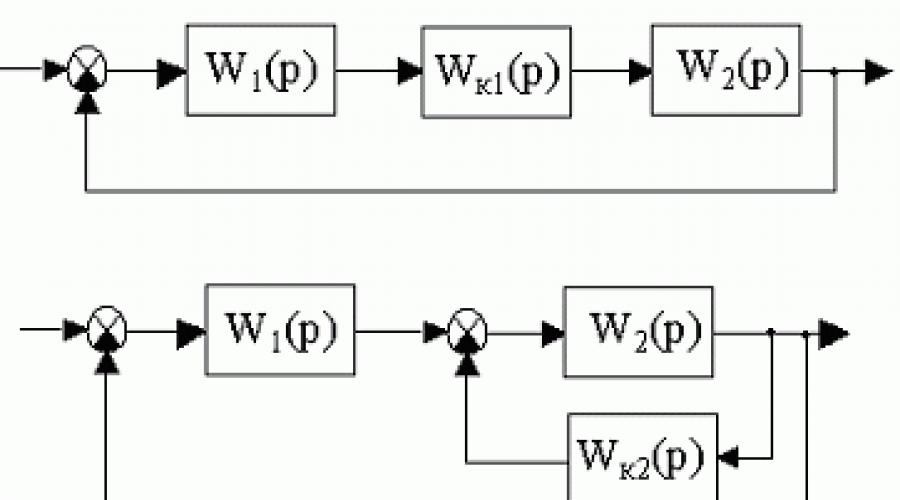
| Типи коригувальних пристроїв |
Розрізняють три види основних коригувальних пристроїв (Рис.6.1): послідовні (W к1 (p)), у вигляді місцевого зворотного зв'язку (W к2 (p)) та паралельні (W к3 (p)).

Рис.6.1. Структурні схемикоригувальних пристроїв.
Спосіб корекції за допомогою послідовних коригувальних пристроїв простий у розрахунках та легко технічно реалізується. Тому він знайшов широке застосуванняособливо при корекції систем, в яких використовуються електричні ланцюгиіз немодульованим сигналом. Послідовні коригувальні пристрої рекомендується застосовувати в системах, де немає дрейфу параметрів ланок. В іншому випадку потрібне підстроювання параметрів корекції.
Корекція систем керування за допомогою паралельного коригуючого пристрою ефективна, коли є необхідність високочастотного шунтування інерційних ланок. У цьому випадку формуються досить складні закони управління з введенням похідних та інтегралів від сигналу помилки з усіма недоліками, що з цього випливають.
Корекція місцевим (локальним) зворотним зв'язком використовується в системах автоматичного керування найчастіше. Перевагою корекції у вигляді місцевого зворотного зв'язку є істотно послаблення впливу нелінійностей характеристик ланок, що входять до місцевого контуру, а також зниження залежності параметрів регуляторів від дрейфу параметрів пристроїв.
Використання тієї чи іншої виду коригувальних пристроїв, тобто. послідовних ланок, паралельних ланок або зворотних зв'язків, Визначається зручністю технічної реалізації. У цьому випадку передатна функція розімкнутої системи повинна бути однією і тією ж при різному включенні коригувальних ланок:
Наведена формула (6.1) дозволяє зробити перерахунок одного типу корекції на інший, щоб вибрати найбільш простий і реалізований.
Кафедра Дистанційного та Заочного
| Синтез САУ |
Синтез системи – це спрямований розрахунок, метою якого є: побудова раціональної структури системи; знаходження оптимальних величин параметрів окремих ланок. При множині можливих рішеньспочатку необхідно сформулювати технічні вимогидо системи. А за умови накладених на САУ певних обмежень необхідно вибрати критерій оптимізації – статична та динамічна точність, швидкодія, надійність, витрати енергії, ціна тощо.
При інженерному синтезі ставляться завдання: досягнення необхідної точності; забезпечення певного характеру перехідних процесів. У цьому випадку синтез зводиться до визначення виду та параметрів коригувальних засобів, які необхідно додати до незмінної частини системи, щоб забезпечити показники якості не гірше за задані.
Найбільшого поширення інженерної практиці отримав частотний метод синтезу з допомогою логарифмічних частотних характеристик.
Процес синтезу системи управління включає наступні операції:
- побудова ЛАЧХ L 0 (ω) вихідної системи W 0 (ω), що складається з регульованого об'єкта без регулятора і без коригувального пристрою;
- побудова низькочастотної частини бажаної ЛАЧХ на основі вимог точності (астатизму);
- побудова середньочастотної ділянки бажаної ЛАЧХ, що забезпечує задане перерегулювання та час регулювання t п САУ;
- узгодження низько-з середньочастотним ділянкою бажаної л.а.г. за умови отримання найбільш простого пристрою, що коригує;
- уточнення високочастотної частини бажаної л.а.г. на основі вимог щодо забезпечення необхідного запасу стійкості;
- визначення виду та параметрів послідовного коригувального пристрою L ку (ω) = L ж (ω) - L 0 (ω), т.к. W ж (р) = W ку (р) * W 0 (р);
- технічна реалізація коригувальних пристроїв. У разі потреби проводиться перерахунок на еквівалентну паралельну ланку або ОС;
- перевірочний розрахунок та побудова перехідного процесу.
Побудова бажаної л.а.г. виробляється вроздріб.
Низькочастотна частина бажаної л.а.г. формується з умови забезпечення необхідної точності роботи системи управління в режимі, що встановився, тобто з умови того, що встановилася помилка системи Δ() не повинна перевищувати задане значення Δ()≤Δ з.
Формування забороненої низькочастотної області для бажаної л.а.г. можливо різними способами. Наприклад, при подачі на вхід синусоїдального сигналу потрібно забезпечити такі допустимі показники: m - максимальна амплітуда помилки; v m – максимальну швидкість стеження; ε m – максимальне прискорення стеження. Раніше було показано, що амплітуда помилки при відтворенні гармонійного сигналу m = g m / W(jω k) , тобто. визначається модулем передавальної функції розімкнутої САУ та амплітудою вхідного впливу g m . Для того, щоб помилка САУ не перевищувала Δ з, бажана л.а.г. повинна проходити не нижче контрольної точки А з координатами: ω=ω к, L(ω к)= 20lg|W(jω k)| = 20lg m/Δm.
Відомі співвідношення:
g(t) = g m sin(ω k t); g"(t) = g m (ω k t); g""(t) = -g m k 2 sin(ω k t);
vm = gmk; ε m = g m ω k 2; g m = v m 2 / ε m; ω k = ε m / v m. (6.2)
Заборонена область, що відповідає системі з астатизмом 1-го порядку і забезпечує роботу з необхідною похибкою по амплітуді стеження, швидкості та прискорення стеження, представлена на рис. 6.2.

Рис.6.2. Заборонена область бажаної л.а.г.
Добротність за швидкістю K ν = v m / Δ m , добротність за прискоренням K ε = ε m / Δ m . У разі, якщо потрібно забезпечити лише статичну помилку регулювання при подачі на вхід сигналу g(t)=g 0 =const, то низько-частотний ділянку бажаної л.а.х. повинен мати нахил 0 дБ/дек і проходити на рівні 20lgK тр, де К тр (необхідний коефіцієнт посилення розімкнутої САУ) розраховується за формулою
Δ з ()=ε ст =g 0 /(1+ К тр), звідки К тр ≥ -1.
Якщо потрібно забезпечити стеження із заданою точність від впливу g(t)=νt при ν=const, то швидкісна помилка ε ск () =ν/К тр. Звідси знаходиться К тр =ν/ε cк і проводиться низькочастотна частина бажаної ЛАХ з нахилом -20 дБ/дек через добротність за швидкістю К ν = К тр =ν/ε cк або точку з координатами: ω=1 c -1, L( 1) = 20lgk тр дБ.
Як було показано раніше, середньочастотна ділянка бажаної л.а.г. забезпечує основні показники якості перехідного процесу - перерегулювання і час регулювання t п. Середньочастотний ділянку бажаної л.а.х. повинен мати нахил -20 дБ/дек і перетинати вісь частот на частоті зрізу ω ср, яка визначається за номограм В.В.Солодовникова (рис.6.3). Рекомендується враховувати порядок астатизму проектованої системи та вибирати ω ср за відповідною номограмою.

Рис.6.3. Номограми якості Солодовнікова:
а – для астатичних САУ 1-го порядку; б – для статичних САУ
Так, наприклад, для σ m =35% і t п =0.6 с, користуючись номограмою (рис.6.3,а) для астатичної системи 1-го порядку, отримаємо t п =4.33 π/ω ср або ω ср =21.7 с -1 .
Через ср =21.7 з -1 необхідно провести пряму з нахилом -20 дБ/дек, а ширина середньочастотної ділянки визначається з умови забезпечення необхідного запасу стійкості по модулю і фазі. Відомі різні підходи до встановлення запасів стійкості. Необхідно пам'ятати, що в системі частота зрізу, тим вище більше ймовірністьтого, що при розрахунках позначиться похибка малих постійних часу окремих пристроїв САУ. Тому рекомендується зі зростанням ω ср штучно збільшувати запаси стійкості по фазі та модулю. Так, для двох типів САУ рекомендується користуватися наведеною в таблиці. При високих вимогах до якості перехідних процесів, наприклад,
20%<σ m <24%;  ,
,
25%<σ m <45%;  ,
,
рекомендуються такі середні показники стійкості: φ зап = 30 °, H м = 12 дБ, - H м = 10 дБ.
На рис.6.4 наведено вид середньочастотної ділянки бажаної л.а.х., ширина якого забезпечує необхідні запаси стійкості.

Рис.6.4. Середньочастотна частина бажаної л.а.г.
Після цього ділянки середніх і низьких частот сполучаються відрізками прямих з нахилами -40 або -60 дБ/дек з умови отримання найпростішого пристрою, що коригує.
Нахил високочастотної ділянки бажаної л.а.г. рекомендується залишити рівним нахилу високочастотної ділянки л.а.г. У цьому випадку коригуючий пристрій буде більш захищеним. Узгодження середньо- та високочастотних ділянок бажаної л.а.г. також проводиться з урахуванням отримання простого коригувального пристрою та, крім того, забезпечення потрібних запасів стійкості.
Передатна функція бажаної розімкнутої системи W ж (p) знаходиться на вигляд бажаної л.а.х. L ж (?). Потім будуються фазова частотна характеристика бажаної розімкнутої САУ та перехідна характеристика бажаної замкнутої системи та оцінюються реально отримані показники якості проектованої системи. Якщо вони задовольняють необхідним значенням, то побудова бажаної л.а.г. вважається закінченим, інакше побудовані бажані ЛЧХ необхідно скоригувати. Для зниження перерегулювання розширюють середньочастотну ділянку бажаної л.а.г. (Збільшують значення ±H м). Для підвищення швидкодії системи необхідно збільшити частоту зрізу.
Для визначення параметрів послідовного коригувального пристрою необхідно:
а) відняти з бажаної л.а.г. L ж наявну л.а.г. L 0, тобто. знайти л.а.г. мінімально-фазового коригувального пристрою L ку;
б) на вигляд л.а.х. послідовного коригуючого пристрою L ку написати його передатну функцію і користуючись довідковою літературою підібрати конкретну схему та реалізацію.
На рис.6.5 наведено приклад визначення передавальної функції послідовного коригувального пристрою.

Рис.6.5. ЛАХ L 0 , бажаної L ж розімкнутої системи
та послідовного коригувального пристрою L ку
Після графічного віднімання отримуємо наступну передатну функцію коригувального пристрою

Паралельний коригуючий пристрій або коригуючий пристрій у вигляді місцевого зворотного зв'язку може бути отриманий перерахунком за формулою (6.1).
За отриманою передатною функцією W ку (р) необхідно спроектувати реальний коригуючий пристрій, який може бути реалізований апаратно або програмно. У разі апаратної реалізації потрібно підібрати схему та параметри коригувального ланки. У літературі є таблиці типових коригувальних пристроїв як пасивних, і активних, як у постійному, і змінному струмі. У тому випадку, якщо використовується для управління САУ ЕОМ, то краще програмна реалізація.
© В.М. Бакаєв, Вологда 2004. Розробка електронної версії: М.А.Гладишев, І.А. Чуранів.
Вологодський державний технічний університет.
Кафедра Дистанційного та Заочного навчання
Великого поширення набули нині системи, побудовані за принципом підлеглого регулювання, що пояснюється рис.6.6. У системі передбачається n контурів регулювання зі своїми регуляторами W pi (p), причому вихідний сигнал регулятора зовнішнього контуру є вказаним значенням внутрішнього контуру, тобто. робота кожного внутрішнього контуру підпорядкована зовнішньому контуру.

Рис.6.6. Структурна схема САУ підпорядкованого регулювання
Два основних переваги визначають роботу систем підлеглого регулювання.
1. Простота розрахунку та налаштування. Налаштування в процесі налагодження ведеться з внутрішнього контуру. Кожен контур включає регулятор, за рахунок параметрів і структури якого виходять стандартні характеристики. Причому кожному контурі компенсується найбільша постійна часу.
2. Зручність обмеження граничних значень проміжних координат системи. Це досягається за рахунок обмеження певним значенням вихідного сигналу регулятора зовнішнього контуру.
Разом з тим, з принципу побудови системи підпорядкованого регулювання очевидно, що швидкодія кожного зовнішнього контуру буде нижчою за швидкодію відповідного внутрішнього контуру. Дійсно, якщо в першому контурі частота зрізу л.а.г. становитиме 1/2T μ , де 2T μ - сума малих некомпенсованих постійних часу, то навіть за відсутності у зовнішньому контурі інших ланок з малими постійними часом, частота зрізу його л.а.г. буде 1/4T μ і т.д. Тому системи підлеглого регулювання рідко будуються із кількістю контурів більше трьох.
Візьмемо типовий контур рис.6.7 і налаштуємо його на модульний (МО) та симетричний (СО) оптимуми.

Рис.6.7. Схема типового контуру
На схемі рис.6.7 позначені: Т μ – сума малих постійних часу;
Т про - велика постійна часу, що підлягає компенсації; До ε і К O - відповідно коефіцієнти посилення блоків з малими постійними часами та об'єктом управління. Слід зазначити, що від типу ланки, постійну час якої слід компенсувати, залежить і тип регулятора W p (p). Він може бути П, І, ПІ та ПІД. Як приклад візьмемо ПІ - регулятор:
![]() .
.
Для модульного оптимуму виберемо параметри:
![]()
Тоді передатна функція розімкнутого контуру матиме вигляд:
![]()
Логарифмічні частотні характеристики, що відповідають передавальній функції W(p), зображені на рис.6.8,а.

Рис.6.8. ЛЧХ і h(t) при модульному налаштуванні
При ступінчастому управляючому вплив вихідна величина вперше досягає встановленого значення через час 4,7Тμ, перерегулювання становить 4,3%, а запас по фазі 63 ° (рис.6.8, б). Передатна функція замкнутої САУ має вигляд

Якщо уявити характеристичне рівняння замкнутої САУ як Т 2 р 2 +2ξТр+1=0, то коефіцієнт демпфування при модульному оптимумі має величину ![]() . У водночас видно, що час регулювання залежить від великої постійної часу Т о. Система має астатизм першого порядку. При налаштуванні системи на симетричний оптимум вибирають параметри ПІ – регулятора таким чином:
. У водночас видно, що час регулювання залежить від великої постійної часу Т о. Система має астатизм першого порядку. При налаштуванні системи на симетричний оптимум вибирають параметри ПІ – регулятора таким чином:
![]()
Тоді передатна функція розімкнутого контуру має вигляд


Відповідні їй логарифмічні частотні характеристики та графік перехідного процесу представлені на рис.6.9.

Рис.6.9. ЛЧХ та h(t) при налаштуванні на симетричний оптимум
Час першого досягнення вихідний величиною встановленого значення становить 3,1Т μ, максимальне перерегулювання досягає 43%, запас по фазі -37°. САУ набуває астатизму другого порядку. Слід зазначити, що ланка з найбільшою постійної часу є аперіодичне 1-го порядку, то з ПІ - регулятором при Т о =4Т μ перехідні процеси відповідають процесам при налаштуванні на МО. Якщо то<4Т μ , то настройка регулятора на τ=Т μ теряет смысл. Необходимо выбрать другой тип регулятора.
У ТАУ відомі інші типи оптимальних налаштувань регуляторів, наприклад:
- биномиальная, коли характеристичне рівняння САУ представляється як (p+ω 0) n - де ω 0 - модуль n - кратного кореня;
- Батерворт, коли характеристичні рівняння САУ різних порядків мають вигляд 
Ці налаштування доцільно застосовувати, коли в системі використовується модальне керування за кожною координатою.
© В.М. Бакаєв, Вологда 2004. Розробка електронної версії: М.А.Гладишев, І.А. Чуранів.
Вологодський державний технічний університет.
| Побудова перехідного процесу |
Існують три групи методів побудови перехідних процесів: аналітичні; графічні, що використовують частотні та перехідні характеристики; побудова перехідних процесів з допомогою ЕОМ. У найскладніших випадках використовують ЕОМ, які дозволяють крім моделювання САУ, підключати до машини окремі частини реальної системи, тобто. близькі до експериментального методу. Перші дві групи використовуються переважно у разі простих систем, і навіть на етапі попереднього дослідження за значного спрощення системи.
Аналітичні методи ґрунтуються на розв'язанні диференціальних рівнянь системи або визначенні зворотного перетворення Лапласа від передавальної функції системи.
Розрахунок перехідних процесів за частотними характеристиками використовують тоді, коли аналіз САУ від початку ведеться частотними методами. В інженерній практиці для оцінки показників якості та побудови перехідних процесів у системах автоматичного управління набув поширення метод трапецеїдальних частотних характеристик, розроблений В.В.Солодовниковим.
Встановлено, що й у систему діє одиничний задає вплив, тобто. g(t)=1(t), а початкові умови є нульовими, то реакцію системи, яка є перехідною характеристикою, в цьому випадку можна визначити як
 (6.3)
(6.3)
 (6.4)
(6.4)
де P(ω) - речова частотна характеристика замкнутої системи; Q(ω) - уявна частотна характеристика замкнутої системи, тобто. Фg(jω)=P(ω)+jQ(ω).
Метод побудови полягає в тому, що побудовану речову характеристику P(ω) розбивають на ряд трапецій, замінюючи приблизно криві лінії прямолінійними відрізками так, щоб при складанні всіх ординат трапецій вийшла вихідна характеристика рис.6.10.

Рис.6.10. Речовина характеристика замкнутої системи
де: ω рi і ω срі - відповідно частота рівномірного пропускання і частота зрізу кожної трапеції.
Потім кожної трапеції визначається коефіцієнт нахилу ω рi /ω срi і з таблиці h-функцій будуються перехідні процеси від кожної трапеції hi. У таблиці h-функцій надано безрозмірний час τ. Для отримання реального часу t i необхідно розділити на частоту зрізу даної трапеції. Перехідний процес кожної трапеції необхідно збільшити в P i (0) раз, т.к. у таблиці h-функцій дано перехідні процеси від одиничних трапецій. Перехідний процес САУ виходить підсумовуванням алгебри побудованих h i процесів від усіх трапецій.
© В.М. Бакаєв, Вологда 2004. Розробка електронної версії: М.А.Гладишев, І.А. Чуранів.
Вологодський державний технічний університет.
Кафедра Дистанційного та Заочного навчання
| Запитання по темі №6 |
1. Що розуміється під поліпшенням якості процесу управління та як це досягається?
2. Назвіть стандартний лінійний закон керування.
3. Розкажіть про типові закони управління та типові регулятори.
4. Яке призначення коригувальних пристроїв? Вкажіть способи їх включення та особливості.
5. Поясніть постановку задач синтезу систем.
6. Перерахуйте етапи синтезу систем.
7. Поясніть побудову бажаної ЛАХ проектованої системи.
8. Як формується передатна функція розімкнутої проектованої системи?
9. Як визначаються передавальні функції коригувальних пристроїв?
10. Які переваги та недоліки паралельних та послідовні коригувальних пристроїв?
11. Як користуються номограмами "замикання"?
12. Перерахуйте методи побудови перехідних процесів.
13. Як за речовою характеристикою визначити значення перехідного процесу?
14.Як змінити бажану л.а.г. підвищення запасів стійкості?
© В.М. Бакаєв, Вологда 2004. Розробка електронної версії: М.А.Гладишев, І.А. Чуранів.
Вологодський державний технічний університет.
Кафедра Дистанційного та Заочного
Тема №7: Нелінійні САУ
| Вступ |
Більшість показників реальних пристроїв у випадку є нелінійними і з них неможливо знайти лінеаризовані, т.к. мають розриви другого роду і до них шматково-лінійна апроксимація не застосовується. Роботу реальних ланок (пристроїв) можуть супроводжувати такі явища як насичення, гістерезис, люфт, наявність зони нечутливості і т.д. Нелінійності можуть бути природними та штучними (навмисно введені). Природні нелінійності притаманні системам з нелінійного прояви фізичних процесів і властивостей в окремих пристроїв. Наприклад, механічна характеристика асинхронного двигуна. Штучні нелінійності вводяться розробниками у системи, щоб забезпечити необхідну якість роботи: для оптимальних по швидкодії систем застосовують релейне управління, наявність нелінійних законів у пошукових та безпошукових екстремальних системах, системи зі змінною структурою тощо.
Нелінійною системоюназивається така система, до складу якої входить хоча б один елемент, лінеаризація якого неможлива без втрати істотних властивостей системи управління загалом. Істотними ознаками нелінійності є: якщо деякі координати або їх похідні за часом входять до рівняння у вигляді творів чи ступеня, відмінного від першого; якщо коефіцієнти рівняння є функціями деяких координат чи їх похідних. При складанні диференціальних рівнянь нелінійних систем спочатку становлять диференціальні рівняння кожного пристрою системи. При цьому характеристики пристроїв, що допускають лінеаризацію, лінеаризуються. Елементи, що не допускають лінеаризації, називаються суттєво нелінійними. В результаті одержують систему диференціальних рівнянь, в якій одне або кілька нелінійних рівнянь. Пристрої, що допускають лінеаризацію, утворюють лінійну частину системи, а пристрої, які не можуть бути лінеаризовані, становлять нелінійну частину. У найпростішому випадку структурна схема САУ нелінійної системи є послідовним з'єднанням безінерційного нелінійного елемента і лінійної частини, охопленим зворотним зв'язком (рис.7.1). Оскільки для нелінійних систем не застосовується принцип суперпозиції, то, проводячи структурні перетворення нелінійних систем, єдиним обмеженням проти структурними перетвореннями лінійних систем, те, що не можна переносити нелінійні елементи через лінійні і навпаки.

Мал. 7.1. Функціональна схема нелінійної системи:
НЕ – нелінійний елемент; ЛЧ – лінійна частина; Z(t) та X(t)
відповідно вихід та вхід нелінійного елемента.
Класифікація нелінійних ланок можлива за різними ознаками. Найбільшого поширення набула класифікація за статичними та динамічними характеристиками. Перші у вигляді нелінійних статичних характеристик, а другі - як нелінійних диференціальних рівнянь. Приклади таких характеристик наведені у . На рис.7.2. наведено приклади однозначних (без пам'яті) та багатозначних (з пам'яттю) нелінійних характеристик. У цьому випадку враховується напрямок (знак) швидкості сигналу на вході.

Рис.7.2. Статичні характеристики нелінійних елементів
Поведінка нелінійних систем за наявності суттєвих нелінійностей має ряд особливостей, відмінних від поведінки лінійних САУ:
1.
вихідна величина нелінійної системи непропорційна вхідному впливу, тобто. параметри нелінійних ланок залежить від величини вхідного впливу;
2.
перехідні у нелінійних системах залежить від початкових умов (відхилень). У зв'язку з цим, для нелінійних систем запроваджено поняття стійкості "у малому", "у великому", "загалом". Система стійка "у малому", якщо вона стійка при малих (нескінченно малих) початкових відхиленнях. Система стійка "у великому", якщо вона стійка при великих (кінцевих за величиною) початкових відхиленнях. Система стійка "в цілому", якщо вона стійка за будь-яких великих (необмежених за величиною) початкових відхилень. На рис.7.3 наведені фазові траєкторії систем: стійкої "в цілому" (а) та системи стійкої "у великому" та нестійкої "в малому" (б);

Рис.7.3. Фазові траєкторії нелінійних систем
3.
для нелінійних систем характерний режим незагасаючих періодичних коливань з постійною амплітудою та частотою (автоколивань), що виникає в системах за відсутності періодичних зовнішніх впливів;
4.
при загасаючих коливаннях перехідного процесу в нелінійних системах можлива зміна періоду коливань.
Ці особливості зумовили відсутність загальних підходів під час аналізу та синтезу нелінійних систем. Розроблені методи дозволяють вирішувати лише локальні нелінійні завдання. Усі інженерні методи дослідження нелінійних систем поділяються на дві основні групи: точні та наближені. До точних методів відноситься метод А. М. Ляпунова, метод фазової площини, метод точкових перетворень, частотний метод В. М. Попова. Наближені методи засновані на лінеаризації нелінійних рівнянь системи із застосуванням гармонійної чи статистичної лінеаризації. Межі застосування того чи іншого методу будуть розглянуті нижче. Слід зазначити, що у найближчому майбутньому є необхідність подальшого розвитку теорії та практики нелінійних систем.
Потужним та ефективним методом дослідження нелінійних систем є моделювання, інструментарієм якого є комп'ютер. В даний час багато складних для аналітичного рішення теоретичних і практичних питань порівняно легко можуть бути вирішені за допомогою обчислювальної техніки.
Основними параметрами, що характеризують роботу нелінійних САУ, є:
1.
Наявність чи відсутність автоколивань. Якщо автоколивання є, необхідно визначити їх амплітуду і частоту.
2.
Час виходу регульованого параметра режим стабілізації (швидкість).
3.
Наявність або відсутність режиму ковзання.
4.
Визначення особливих точок та особливих траєкторій руху.
Це не повний перелік досліджуваних показників, які супроводжують роботу нелінійних систем. Системи екстремальні, самоналаштовуються, зі змінними параметрами вимагають оцінки та додаткових властивостей.
© В.М. Бакаєв, Вологда 2004. Розробка електронної версії: М.А.Гладишев, І.А. Чуранів.
Вологодський державний технічний університет.
Кафедра Дистанційного та Заочного навчання.
Ідея методу гармонійної лінеаризації належить Н.М. Крилову та Н.М. Боголюбову і базується на заміні нелінійного елемента системи лінійною ланкою, параметри якого визначаються при гармонійному вхідному впливі з умови рівності амплітуд перших гармонік на виході нелінійного елемента та еквівалентної лінійної ланки. p align="justify"> Метод є наближеним і може бути використаний тільки у випадку, коли лінійна частина системи є фільтром низьких частот, тобто. відфільтровує всі виникаючі на виході нелінійного елемента гармонійні складові, крім першої гармоніки. При цьому лінійна частина може бути описана диференціальним рівнянням будь-якого порядку, а нелінійний елемент може бути однозначним, так і багатозначним.
У основі методу гармонійної лінеаризації (гармонічного балансу) лежить припущення, що у вхід нелінійного елемента подається гармонійний вплив із частотою і амплітудою А, тобто. x = А sin?t. У припущенні, що лінійна частина є фільтром низьких частот, спектр вихідного сигналу лінійної частини обмежується лише першою гармонікою, яка визначається поруч Фур'є (у цьому і полягає наближеність методу, тому що вищі гармоніки викидаються з розгляду). Тоді зв'язок між першою гармонікою вихідного сигналу та вхідним гармонійним впливом нелінійного елемента представляється у вигляді передавальної функції:
![]() (7.1)
(7.1)
Рівняння (7.1) називається рівнянням гармонійної лінеаризації, а коефіцієнти q і q" - коефіцієнтами гармонійної лінеаризації, що залежать від амплітуди А і частоти ω вхідного впливу. Для різних видів нелінійних характеристик коефіцієнти гармонійної лінеаризації зведені в таблицю. Слід зазначити. q"(А)=0. Піддавши рівняння (7.1) перетворення Лапласа при нульових початкових умовах з наступною заміною оператора p на jω (p = jω), отримаємо еквівалентний комплексний коефіцієнт передачі нелінійного елемента
W не (j?, A) = q + jq". (7.2)
Після того, як проведена гармонійна лінеаризація, для аналізу та синтезу нелінійних САУ можливе застосування всіх методів, що застосовуються для дослідження лінійних систем, у тому числі використання різних критеріїв стійкості. При дослідженні нелінійних систем на основі методу гармонійної лінеаризації насамперед вирішують питання про існування та стійкість періодичних (автоколивальних) режимів. Якщо періодичний режим стійкий, то в системі існують автоколивання з частотою 0 і амплітудою А 0 . Розглянемо нелінійну систему, що включає лінійну частину з передавальною функцією
 (7.3)
(7.3)
та нелінійний елемент з еквівалентним комплексним коефіцієнтом передачі (7.2). Розрахункова структурна схема нелінійної системи набуває вигляду рис.7.5.

Рис.7.5. Структурна схема нелінійної САУ
Для оцінки можливості виникнення автоколивань у нелінійній системі методом гармонійної лінеаризації необхідно знайти умови межі стійкості, як це робилося під час аналізу стійкості лінійних систем. Якщо лінійна частина описується передатною функцією (7.3), а нелінійний елемент (7.2), то характеристичне рівняння замкнутої системи матиме вигляд
d(p) + k(p)(q(ω,A) + q"(ω,A)) = 0 (7.4)
З критерію стійкості Михайлова кордоном стійкості буде проходження годографа Михайлова через початок координат. З виразів (7.4) можна знайти залежність амплітуди та частоти автоколивань від параметрів системи, наприклад, коефіцієнта передачі k лінійної частини системи. І тому необхідно у рівняннях (7.4) коефіцієнт передачі k вважати змінної величиною, тобто. це рівняння записати у вигляді:
d(jω) + K(jω)(q(ω,A) + q"(ω,A)) = Re(ω 0 ,A 0 ,K) +Jm(ω 0 ,A 0 ,k) = 0 (7.5)
де ω o і A o - можливі частота та амплітуда автоколивань.
Тоді, прирівнюючи до нуля дійсну та уявну частини рівняння (7.5)
 (7.6)
(7.6)
Уточнення структурної схеми системи регулювання вибору та розрахунку її елементів та параметрів. Експериментальне дослідження системи або окремих її частин у лабораторних умовах та внесення відповідних виправлень до її схеми та конструкції. Проектування та виробництво системи регулювання. Налагодження системи у реальних умовах роботи дослідна експлуатація.
Поділіться роботою у соціальних мережах
Якщо ця робота Вам не підійшла внизу сторінки, є список схожих робіт. Також Ви можете скористатися кнопкою пошук
Лекція №6 Синтез систем автоматичного керування
СИНТЕЗ САУ ¦ вибір структури та параметрів САУ, початкових умов та вхідних впливів відповідно до необхідних показників якості та умов функціонування.
Проектування САУ передбачає виконання наступних етапів:
- Дослідження об'єкта регулювання: складання математичної моделі, визначення параметрів, характеристик та умов роботи об'єкта.
- Формулювання вимог до САР.
- Вибір принципу керування; визначення функціональної структури (технічний синтез)
- Вибір елементів схеми регулювання з урахуванням статичних, динамічних, енергетичних, експлуатаційних та ін. вимог та узгодження їх між собою за статичними та енергетичними характеристиками (процедура не формалізована – інженерна творчість).
- Визначення алгоритмічної структури (теоретичний синтез) провадиться за допомогою математичних методів та на підставі вимог, записаних у чіткій математичній формі. Визначення законів регулювання та розрахунок коригувальних пристроїв, що забезпечують задані вимоги.
- Уточнення структурної схеми системи регулювання, вибору та розрахунку її елементів та параметрів.
- Експериментальне дослідження системи (або окремих її частин) у лабораторних умовах та внесення відповідних виправлень у її схему та конструкцію.
- Проектування та виробництво системи регулювання.
- Налагодження системи у реальних умовах роботи (дослідна експлуатація).
Проектування САУ починають із вибору об'єкта управління та основних функціональних елементів (підсилювачів, виконавчих пристроїв та ін.), тобто розробляють силову частину системи.
Задані статичні та динамічні характеристики системи забезпечуються відповідним вибором структури та параметрів силової частини, спеціальних коригувальних пристроїв та всієї САУ в цілому.
Призначення коригувальних пристроїв: забезпечити необхідну точність роботи системи та отримати прийнятний характер перехідного процесу.
Коригувальні ланки вводяться в систему різними способами: послідовно, місцева ООС, пряме паралельне включення, зовнішні (поза контуром регулювання) компенсуючі пристрої, охоплення всієї САУ стабілізуючої ООС, непоодинокий головний зворотний зв'язок.
Типи електричних коригувальних пристроїв постійного струму: активні та пасивні чотириполюсники постійного струму, трансформатори, що диференціюють, тахогенератори постійного струму, тахометричні мости та ін.
За призначенням коригувальні пристрої класифікуються:
- СТАБІЛІЗУЮЧІ забезпечувати стійкість САУ та покращувати їх статичні та динамічні характеристики;
- КОМПЕНСУЮЧІ Зменшувати статичні та динамічні помилки при побудові САУ за комбінованим принципом;
- Підвищення перешкодозахищеності систем, наприклад, фільтрація вищих гармонік при демодуляції сигналу прямого каналу;
- СПЕЦІАЛІЗОВАНІ для надання системі особливих властивостей, що дозволяють поліпшити показники якості системи.
САУ можуть бути побудовані за такими структурними схемами:
- З послідовним коригуючим ланцюгом.
Підсилювач повинен мати великий вхідний опір, щоб не шунтувати вихід коригуючого ланцюга.
Застосовується у разі повільно змінюються вхідних впливах, так як при великих неузгодженості відбувається насичення в реальних нелінійних елементах, частота зрізу йде вліво і система повільно виходить зі стану насичення.
Рис.1.
Послідовна корекція часто використовується в системах стабілізації або для корекції контуру з зворотним зв'язком, що коригує.
Зменшується.

- Зі зустрічно паралельним коригуючим ланцюгом.

Рис.2.
Надходить на вхід як різницю і глибокого насичення не настає.
- З послідовно | паралельним коригуючим ланцюгом.

Рис.3.
- З комбінованими коригуючими ланцюгами.
Синтез САУ підпорядкованого регулювання з двома та більше контурами проводиться шляхом послідовної оптимізації контурів, починаючи з внутрішнього.
Розрахунок систем ділиться на 2 етапи:статичний та динамічний.
Статичний розрахунокполягає у виборі основних ланок системи, що входять до її головного ланцюга, складання структурної схеми останньої та визначення параметрів основних елементів системи (коефіцієнтів посилення, що забезпечують необхідну точність, постійних часу всіх елементів, передавальних чисел, передавальних функцій окремих ланок, потужності двигуна). Крім того, сюди входить розрахунок і проектування магнітних і напівпровідникових підсилювачів і вибір транзисторних або тиристорних перетворювачів, двигунів, чутливих елементів та інших допоміжних пристроїв систем, а також розрахунок точності в режимі роботи і чутливості системи, що встановився.
Динамічний розрахуноквключає великий комплекс питань, пов'язаних із стійкістю та якістю перехідного процесу (швидкістю, характеристикою відпрацювання та динамічною точністю роботи системи). У процесі розрахунку вибираються коригувальні ланцюги, місця їх включення та визначаються параметри останніх. Проводиться також розрахунок кривої перехідного процесу чи моделювання системи з метою уточнення отриманих якісних показників та обліку деяких нелінійностей.
Платформи, на яких будуються стабілізуючі алгоритми:
- Класична (диференціальні рівняння – тимчасові та частотні методи);
- Нечітка логіка;
- Нейронні мережі;
- Генетичні та мурашині алгоритми.
Методи синтезу регуляторів:
- Класична схема;
- ПІД регулятори;
- Метод розміщення полюсів;
- Метод ЛЧХ;
- Комбіноване керування;
- Безліч стабілізуючих регуляторів.
Класичний синтез регуляторів
Класична структурна схема керування об'єктом наведена на рис. 1. Зазвичай регулятор вмикають перед об'єктом.

Мал. 1. Класична структурна схема управління об'єктом
Завдання системи управління полягає в тому, щоб придушити дію зовнішнього обурення та забезпечити якісні перехідні процеси. Ці завдання часто суперечливі. Фактично нам потрібно стабілізувати систему так, щоб вона мала необхідні передавальні функції по впливу, що задає, і по каналу обурення:
, .
Для цього ми можемо використовувати лише один регулятор, тому таку систему називають системою з одним ступенем волі.
Ці дві передавальні функції пов'язані рівністю
Тому, змінюючи одну з передатних функцій, автоматично змінюємо і другу. Таким чином їх неможливо сформувати незалежно і рішення завжди буде деяким компромісом.
Подивимося, чи можна в такій системі забезпечити нульову помилку, тобто абсолютно точне відстеження вхідного сигналу. Передатна функція помилково дорівнює
Для того, щоб помилказавжди була нульовою, потрібно, щоб ця передатна функція дорівнювала нулю. Оскільки її чисельник - не нуль, одразу отримуємо, що знаменник повинен звертатися до нескінченності. Ми можемо впливати лише на регулятор, тому одержуємо. Таким чином,для зменшення помилки потрібно
збільшувати коефіцієнт посилення регулятора.
Однак не можна збільшувати посилення до нескінченності. По-перше, всі реальні пристрої мають гранично допустимі значення вхідних та вихідних сигналів. По-друге, при великому посиленні контуру погіршується якість перехідних процесів, посилюється вплив збурень та шумів, система може втратити стійкість. Тому у схемі з одним ступенем свободи забезпечити нульову помилку стеження неможливо.
Подивимося завдання із погляду частотних характеристик. З одного боку, для якісного відстеження сигналу, що задає, бажано, щоб частотна характеристика була приблизно дорівнює 1 (в цьому випадку). З іншого боку, з погляду робастної стійкості необхідно забезпечити високих частотах, де помилка моделювання велика. Крім того, передавальна функція з обурення має бути такою, щоб ці обурення придушувати, в ідеалі ми маємо забезпечити.
Вибираючи компромісне рішення, зазвичай надходять так:
● на низьких частотах домагаються виконання умови, що забезпечує гарне стеження за низькочастотними сигналами; при цьому, тобто низькочастотні обурення пригнічуються;
● на високих частотах прагнуть зробити, щоб забезпечити робастну стійкість та придушення шуму вимірювань; при цьому тобто система фактично працює як розімкнена, регулятор не реагує на високочастотні перешкоди.
Розрахунок лінійних безперервних САУ за заданою точністю
В режимі роботи, що встановився
Одна з основних вимог, яким повинна задовольняти САУ, полягає в забезпеченні необхідної точності відтворення сигналу, що задає (керуючого) в встановленому режимі роботи.
Порядок астатизму і передавальний коефіцієнт системи знаходять виходячи з вимог до точності в режимі, що встановився.Якщо передавальний коефіцієнт системи, визначений за необхідною величиною статизму і добротності (у разі астатичної САУ), виявляється настільки великим, що суттєво ускладнює навіть просто стабілізацію системи, доцільно підвищити порядок астатизму і цим звести до нуля задану помилку, що встановилася незалежно від значення передавального коефіцієнта системи . В результаті стає можливим величину цього коефіцієнта вибирати, виходячи лише з міркувань стійкості та якості перехідних процесів.
Нехай структурна схема САР наведена до вигляду

Тоді в квазіусталеному режимі роботи САР неузгодження представимо у вигляді ряду, що сходить.
де виконують роль вагових констант.
Очевидно, що такий процес може мати місце тільки в тому випадку, якщо повільно змінюється і досить плавна функція.
Якщо уявити передатну функцію розімкнутої системи у вигляді
то за r =0
при r = 1
при r = 2
при r = 3
Низькочастотна частина логарифмічних амплітудних частотних характеристик обумовлює точність роботи системи при відпрацюванні сигналів управління, що повільно змінюються, в стані, що визначається, і визначається коефіцієнтами помилок. Коефіцієнти помилок більше істотно не впливають на точність САУ, і їх можна не враховувати при практичних розрахунках.
1. Розрахунок встановленого режиму роботи САР за заданими коефіцієнтами неузгодженості (помилки)
Точність роботи системи в режимі визначається величиною передавального коефіцієнта розімкнутої системи, який визначається в залежності від форми завдання вимог до точності системи.
Розрахунок ведеться в такий спосіб.
- СТАТИЧНІ САР. Тут задається величина коефіцієнта позиційної помилки, яким визначається: .
дБ
20 lgk pc
ω , з -1
- АСТАТИЧНІ СИСТЕМИ 1-го порядку.
І тут заданий коефіцієнт, яким визначається
Якщо задані коефіцієнти і, то, який визначає положення низькочастотної асимптоти ЛАЧХ розімкнутої системи з нахилом -20 дБ/дек, а друга асимптота має нахил -40 дБ/дек при частоті, що сполучає (рис.1).

Рис.1.
- АСТАТИЧНІ СИСТЕМИ 2-го порядку.
За заданим коефіцієнтом визначимо k pc :
дБ
ω , з -1
2. Розрахунок режиму роботи САР, що встановився, за заданою максимальною величиною неузгодження (помилки) системи
На підставі припустимого значення помилки, що встановилася, і виду керуючого впливу вибираються параметри низькочастотної частини ЛАЧХ системи.
- Нехай задані допустима максимальна помилка при гармонійному впливі з амплітудою та частотою та порядок астатизму системи.
Тоді низькочастотна асимптота ЛАЧХ системи повинна проходити не нижче за контрольну точку з координатами:
(1)
і мати нахил -20 r дБ/груд. Залежність (1) справедлива за.
- Нехай задані допустима максимальна помилка при максимальній швидкості та максимальне прискорення вхідного впливу та порядок астатизму r системи.
Часто зручно користуватися методом еквівалентної синусоїдальної дії, запропонованої Я.Є. Гукайло.
У цьому випадку визначається режим, при якому амплітуди швидкості та прискорення дорівнюють максимальним заданим значенням. Нехай вхідний вплив змінюється відповідно до заданого закону
. (2)
Прирівнюючи амплітудні значення швидкості та прискорення, отримані диференціюванням виразу (2), заданим значенням та отримаємо
звідки, . За цими величинами можна побудувати контрольну
точку В з координатами та
При одиничному негативному зворотному зв'язку,
При непоодинокому зворотному зв'язку.
Якщо швидкість сигналу на вході максимальна, а прискорення зменшується, то контрольна точка рухатиметься прямою з нахилом -20 дБ/дек у діапазоні частот. Якщо ж прискорення дорівнює максимальному значенню, а швидкість зменшується, то контрольна точка рухається по прямій з нахилом -40дБ/дек у діапазоні частот.
Область, розташована нижче контрольної точки і двох прямих з нахилами -20дБ/дек і -40дБ/дек, являє собою заборонену область для ЛАЧХ стежить системи. Так як точна ЛАЧХ проходить нижче точки перетину двох асимптотів на 3 дБ, то бажана характеристика повинна бути піднята вгору на цю величину, тобто.
При цьому необхідне значення добротності за швидкістю, а частота в точці перетину другої асимптоти з віссю частот (рис.2)
У тому випадку, коли керуючий вплив характеризується лише максимальною швидкістю, добротність системи за швидкістю при заданому значенні помилки:
Якщо задано лише максимальне прискорення сигналу та величину помилки, то добротність прискорення:

Рис.2.
- Нехай задана максимальна статична помилка каналом управління (вхідний вплив ступінчасте, система статична каналом управління).

Рис.3.
Тоді величина визначається з виразу. Статичну точність автоматичної системи можна визначити з рівняння:
де статична точність замкнутої системи,
відхилення регульованої величини в розімкнутій системі,
¦ передавальний коефіцієнт розімкнутої системи, необхідний для забезпечення заданої точності.
- Нехай задана максимальна припустима статична помилка по каналу обурення (ступінчасте, що обурює вплив, система статична по каналу обурення, рис.3).
Тоді величина визначається з виразу:
де | передавальний коефіцієнт розімкнутої системи по каналу обурення,
де помилка системи без регулятора.
У статичних системах управління встановилася помилка, викликана постійним впливом, що збурює, зменшується в порівнянні з розімкнутою системою в 1+. При цьому в 1+ разів зменшується також передаточний коефіцієнт замкнутої системи.
- Нехай задана допустима швидкісна помилка від керуючого впливу (вхідна дія змінюється з постійною швидкістю, астатична система першого порядку).
Слідкуючі системи проектують зазвичай астатичними першого порядку. Вони працюють при змінному впливі, що управляє. Для таких систем у режимі найбільш характерним є зміна вхідного впливу по лінійному закону.
Тоді добротність системи за швидкістю визначається з виразу:
Оскільки помилка, що встановилася, визначається низькочастотною частиною ЛАЧХ, то за обчисленим значенням передатного коефіцієнта може бути побудована низькочастотна асимптота бажаної ЛАЧХ.
3. Розрахунок встановленого режиму роботи САР за заданою максимальною припустимою помилкою системи з непоодиноким зворотним зв'язком
Нехай апріорна інформація про вхідний сигнал зведена до мінімуму:
- Максимальне за модулем значення першої похідної вхідного впливу (максимальна швидкість стеження);
- Максимальне за модулем значення другої похідної вхідного впливу (максимальне прискорення стеження) ;
- Вхідна дія може бути детермінованим або випадковим сигналом з будь-якою спектральною густиною.
Потрібно обмежити максимально припустиму помилку системи управління при відтворенні корисного сигналу в режимі роботи, що встановився величиною.
Вимога до точності відтворення найбільш просто формулюється для гармонійного вхідного впливу, еквівалентного реальному вхідному сигналу:
у припущенні, що амплітуда та частота задані, а початкова фаза має довільне значення.
Встановимо зв'язок між припустимою помилкою відтворення вхідного впливу та параметрами системи та вхідного сигналу.
Нехай структурну схему безперервної САУ зведено до виду (рис.4).

Рис.4.
Помилка на виході системи у часовій області визначається виразом:
де еталонна (безпомилкова) вихідна функція.
Можна показати, що внаслідок обмежень на швидкості та прискореннявихідна функція відрізняється від східчастої.
Відобразимо останній вираз у простір перетворень Лапласа:
Відобразимо у простір перетворень Фур'є:
В області низьких частот (, постійні часу ланцюга зворотного зв'язку) , тоді
максимальна амплітуда помилки визначається за виразом:
У реальних системах на низьких частотах зазвичай, Бо слід виконати вимогу; математичний вираз для визначенняперетворюється на контрольній частоті () на вигляд
і для того, щоб вихідна функція відтворювалася з максимальною помилкою не більш заданою, ЛАЧХ проектованої системи не повинна проходити нижче контрольної точки з координатами
4. Розрахунок встановленого режиму роботи статичної САУ методом граничних переходів
Твердження
Нехай задана узагальнена структурна схема статичної САР:

де, тут поліноми чисельників та знаменників не містять множника p (Вільні члени їх рівні одиниці),
передатний коефіцієнт регулятора,
¦ передавальний коефіцієнт об'єкта по каналу управління,
¦ передавальний коефіцієнт зворотного зв'язку,
¦ передавальний коефіцієнт об'єкта по каналу обурення,
причому в першому наближенні статичні і динамічні передавальні коефіцієнти ланок прийняті рівними, номінальному вхідному впливу відповідає номінальна величина вихідної функції по каналу управління, і нехай задані величина ступінчастого впливу, що обурює, і допустима статична помилка по каналу обурення в % від номінального значення вихідної функції.
Тоді передатні коефіцієнти системи по каналах управління та обурення в режимі, що встановився, рівні статичним передавальним коефіцієнтам замкнутої системи і визначаються за формулами:
(1)
Рівняння статики каналами управління та обурення мають вигляд
(2)
Передавальні коефіцієнти регулятора та ланцюги зворотного зв'язку визначаються за виразами:
(3)
Способи підвищення статичної точності САУ
- Збільшення передавального коефіцієнта розімкнутої системи в статичнихсистемах.

Де, .
Проте умови стійкості зі збільшенням погіршуються, тобто збільшуються похибки у поступовій динаміці.
- Введення в регулятор інтегральної складової.
2.1. Застосування І-регулятора: .
У цьому випадку система стає астатичною по каналах управління та обурення, а статична помилка стає рівною нулю. ЛАЧХ системи піде значно крутіше вихідної, а фазовий зсув збільшується на 90 градусів. Система може виявитися нестійкою.
2.2. Установка ПІ-регулятора: .
Тут статична помилка дорівнює нулю, а умови стійкості кращі, ніж у системи з І-регулятором.
2.3. Використання ПІД-регулятора: .
Статична помилка системи дорівнює нулю, а умови стійкості кращі, ніж у системі з ПІ-регулятором.
- Введення в систему непоодинокого зворотного зв'язку, якщо потрібно відтворення інформаційного рівня вхідного сигналу.
Вважаємо, що і – статичні ланки. , потрібно підібрати таке,
Щоб; .
- Масштабування вхідного
дії.
Тут.
Вихідна функція дорівнюватиме інформаційному рівню вхідного впливу, якщо, звідси, де.
- Застосування принципу компенсації каналами управління та обурення.
Розрахунок компенсуючих пристроїв викладено у розділі «Розрахунок систем комбінованого керування».
Розрахунок динаміки САУ
Синтез САУ з ЛЧХ
В даний час розроблено велику кількість методів синтезу коригувальних пристроїв, які поділяються на:
- аналітичні методи синтезу, в яких використовуються аналітичні вирази, що пов'язують показники якості системи з параметрами пристроїв, що коректують;
- графо-аналітичні.
Найзручніший із графо-аналітичних методів синтезу - класичний універсальний метод логарифмічних частотних характеристик.
Сутність методу полягає в наступному. Спочатку будують асимптотичну ЛАЧХ вихідної системи, потім будують бажану ЛАЧХ розімкнутої системи; ЛАЧХ коригувального пристрою повинна так змінити форму ЛАЧХ вихідної системи, щоб ЛАЧХ скоригованої системи.
Найбільш складним та відповідальним етапом при синтезі є побудова бажаної ЛАЧХ. При побудові припускають, що система, що синтезується, має одиничний негативний зворотний зв'язок і являє собою мінімально-фазову систему. Кількісний зв'язок між показниками якості перехідної функції мінімально-фазових систем з одиничними ООС та ЛАЧХ розімкнутої системи встановлюється на підставі номограм Честната-Майєра, В.В.Солодовнікова, А.В.Фатєєва, В.А.Бесекерського.
Бажану ЛАЧХ умовно поділяють на три частини: низькочастотну, середньочастотну та високочастотну. Низькочастотна частина визначається статичною точністю системи - точність роботи САУ в режимі, що встановився. У статичній системі низькочастотна асимптота паралельна осі частот, в астатичних системах нахил низькочастотної асимптоти становить 20 * дБ/дек, де - Порядок астатизму ( = 1, 2, 3, ...). Середньочастотна частина є найважливішою, оскільки вона переважно визначає динаміку процесів у системі. Основні параметри середньочастотної асимптоти - це її нахил та частота зрізу. Чим більший нахил середньочастотної асимптоти, тим важче забезпечити хороші динамічні властивості системи. Тому доцільним є нахил 20 дБ/г і вкрай рідко він перевищує 40 дБ/г. Частота зрізу визначає швидкодію системи. Чим більше, тим вища швидкодія (тим менше). Високочастотна частина бажаної ЛАЧХ незначно впливає динамічні властивості системи. Взагалі кажучи, краще мати більший нахил її асимптоти, що зменшує необхідну потужність виконавчого органу і вплив високочастотних перешкод.
Бажану ЛАЧХ будують на основі вимог до системи: вимоги до статичних властивостей задають у вигляді порядку астатизму та передавального коефіцієнта розімкнутої системи; динамічні властивості найчастіше задаються максимально допустимим значенням перерегулювання та часом регулювання; іноді задають обмеження як максимально допустимого прискорення регульованої величини при початковому неузгодженні.
Методи побудови бажаної ЛАЧХ: побудова за В.В.Солодовниковим, використання типових ЛАЧХ і номограм для них, побудова за Є.А.Санковським Г.Г.Сигалову, спрощена побудова, побудова за В.А.Бесекерським, за методом А. В.Фатєєва та ін. методи.
Переваги частотних методів:
● Частотні характеристики, що відображають математичну модель об'єкта, можуть бути порівняно просто отримані експериментальним шляхом;
● Розрахунки за частотними характеристиками зводяться у прості та наочні графо-аналітичні побудови;
● Частотні методи поєднують простоту та наочність у вирішенні завдань незалежно від порядку системи, наявності трансцендентних або ірраціональних ланок передавальної функції.
Синтез бажаної ЛАЧХ
Теоретичними та експериментальними дослідженнями встановлено, що ЛАЧХ розімкнутої системи регулювання, стійкої в замкнутому стані, майже завжди перетинає вісь частот ділянкою, що має нахил 20 дБ/дек. Перетин осі частот ділянкою ЛАЧХ з нахилом 40 дБ/дек або 60 дБ/дек можливе, але використовується рідко, бо така система стійка при дуже низькому передатному коефіцієнті.
Найбільш раціональна форма ЛАЧХ розімкнутої системи, стійкої у замкнутому стані, має нахили:
- низькочастотна асимптота 0, -20, -40 дБ/дек (визначається порядком астатизму системи);
- асимптота, що сполучає низькочастотну з середньочастотною асимптотами, може мати нахили 20, -40, -60 дБ/дек;
- середньочастотна асимптота 20 дБ/ Грудень;
- асимптота, що сполучає середньочастотну з високочастотною ділянкою ЛАЧХ, як правило, має нахил -40 дБ/дек;
- високочастотну ділянку ЛАЧХ будують паралельно асимптотам високочастотної ділянки ЛАЧХ вихідної розімкнутої системи.
При побудові бажаних ЛЧХ виходять із таких вимог:
- Скоригована система повинна задовольняти заданим показникам якості (припустима помилка в режимі, необхідний запас стійкості, швидкодія, перерегулювання та інші показники якості перехідних процесів).
- Форма бажаних ЛЧХ повинна по можливості мало відрізнятися від ЛЧХ некоригованої системи для спрощення стабілізуючого пристрою.
- Слід прагнути до того що, щоб у високих частотах не проходила вище ЛАЧХ нескоректованої системи більш як 20-25 дБ.
- Низькочастотна частина бажаної ЛАЧХ повинна збігатися з ЛАЧХ некоригованої системи, так як передавальний коефіцієнт розімкнутої некоригованої в динаміці системи вибирається з урахуванням необхідної точності в режимі, що встановився.
Побудова бажаних ЛЧХ вважатимуться закінченим, якщо задоволені всі вимоги до якості системи. В іншому випадку слід повернутися до розрахунку встановленого режиму роботи і змінити параметри елементів основного ланцюга (вибрати двигун іншої потужності або менш інерційний, використовувати підсилювач з меншою постійним часом, включити жорсткий негативний зворотний зв'язок, що охоплює найбільш інерційні елементи системи, і т.д.) .
Алгоритм побудови бажаних ЛЧХ

- Вибір частоти зрізу L ж (w).
Якщо задані перерегулювання та час загасання перехідного процесу, то використовуються номограми В.В.Солодовнікова або А.В.Фатєєва; якщо заданий показник коливання М, то розрахунок ведуть методом В.А.Бесекерського.
В основу побудови номограм якості В.В.Солодовниковим покладено типову речову частотну характеристику замкнутої САУ (рис. 2). Для статичних систем ( =0) , для астатичних систем ( =1, 2,…) .
Цей метод передбачає, що дотримується співвідношення.
Як вихідні прийняті динамічні показники якості та, які пов'язані з параметрами речової частотної характеристики замкнутої САУ діаграмою якості В.В. Солодовнікова (рис. 3). За заданим за допомогою кривої (рис.3) визначається відповідне значення. Потім і кривою визначається значення, яке дорівнює заданому, отримуємо, де значення частоти зрізу, при якому час регулювання не перевищить заданого значення.
З іншого боку, обмежується допустимим прискоренням регульованої координати. Рекомендовано, де початкова неузгодженість.
Час регулювання можна приблизно визначити, використовуючи емпіричну формулу, де коефіцієнт чисельника приймається рівним 2 при, 3 при, 4 при.
Завжди бажане проектування системи з максимально можливою швидкодією.
Як правило, не перевищує більш ніж на ½ декади. Це пов'язано з ускладненням коригувальних пристроїв, необхідністю введення в систему диференційних ланок, що зменшує надійність і завадостійкість, а також через обмеження максимально допустимого прискорення регульованої координати.
Частоту зрізу можна збільшувати лише збільшенням. Статична точність у своїй зростає, але погіршуються умови стійкості.
Прийняття рішення щодо вибору повинно мати достатнє обґрунтування.
- Будуємо середньочастотну асимптоту.
- Середньочастотну асимптоту сполучаємо з низькочастотною асимптотоютак, щоб в інтервалі частот, в якому мати надлишок фази. Надлишок фази та надлишок модуля визначаємо за номограмою (рис. 4). Сполучна асимптота має нахил 20, -40 або 60 дБ/дек при =0 ( - Порядок астатизму системи); -40, -60 дБ/дек при =1 та -60 дБ/дек при =2.
Якщо надлишок фази виявиться меншим, то сполучну асимптоту слід змістити ліворуч або зменшити її нахил. Якщо надлишок фази більший за допустимий, то сполучну асимптоту зміщують вправо або збільшують її нахил.
Початкова сполучна частота визначається з виразу.
- Середньочастотну асимптоту сполучаємо з високочастотною частиноютаким чином, щоб в інтервалі частот, де надлишок фази був. Сполучну частоту визначаємо за співвідношенням.
Якщо на частоті, що сполучає<, то сопрягающую асимптоту смещают вправо или уменьшают ее наклон.
Якщо >, то асимптоту, що сполучає, зміщують вліво або збільшують її нахил. Різниця, що рекомендується, повинна становити кілька градусів. Права частота сполучає асимптоти.
Як правило, нахил цієї асимптоти становить -40 дБ/дек, а допустима різниця. Перевірка проводиться на частоті, за якої.
- Високочастотна частина проектується паралельно або поєднується з нею.
Ця частина показника впливає плавність роботи системи.
Отже, на першому етапі побудови частоти, на яких сполучається середньочастотна асимптота з асимптотами, що сполучають, знаходяться з умов. З другого краю етапі уточнюються значення сполучних частот з урахуванням надлишків фази. На третьому етапі коригуються всі сполучні частоти за умов їх близькості до сполучної частоти вихідної системи, тобто якщо ці частоти незначно відрізняються один від одного.
Синтез коригувального ланцюга послідовного типу
У схемі рис.1 звідси можуть бути отримані параметри коригувального ланцюга:
Перейдемо до логарифмічних частотних характеристик:
На високих частотах ЛАЧХ регулятора «за замовчуванням» має перевищувати 20 дБ за умовою перешкоди захисту. Фундаментальний принцип структурно-параметричної оптимізації САУ зі зворотним зв'язком: регулятор повинен містити динамічну ланку з передатною функцією, що дорівнює або близька до зворотної передавальної функції об'єкта управління.
Розглянемо на прикладі розрахунок послідовного коригувального ланцюга.
Нехай потрібно скоригувати статичну систему. Припустимо, що і ми побудовані. Вважаємо, що система з мінімально-фазовими ланками, тому фазо-частотну характеристику не будуємо (рис.2).
Тепер легко відтворити параметри коригувального ланцюга. Найчастіше використовуються активні коригувальні пристрої та пасивні RC -ланцюги. Виходячи з фізичних уявлень будуємо ланцюг, зображений на рис. 3.
Послаблення сигналу дільником R 1- R 2 на високих частотах відповідає ослаблення сигналу *.
Де,
На високих частотах не вносить спотворень позитивний фактор. Частоту зрізу маємо можливість зрушити вліво за допомогою коригувального ланцюга та забезпечити необхідну стійкість та якість роботи системи.
Переваги послідовних КУ:
- Простота коригувального пристрою (у багатьох випадках реалізуються у вигляді простих пасивних RC-контурів);
- Простота увімкнення.
Недоліки:
- Ефект послідовної корекції зменшується в процесі експлуатації при зміні параметрів (коефіцієнтів посилення, постійних часу), тому при послідовній корекції стабільності параметрів елементів пред'являються підвищені вимоги, що досягається застосуванням більш дорогих елементів;
- Диференціюючі фазоперемінні RC -Контури (алгоритми в мікроконтролерах) чутливі до високочастотних перешкод;
- Послідовні інтегруючі RC -Контури містять більш громіздкі конденсатори (потрібна реалізація великих постійних часу), ніж контури в ланцюгу зворотного зв'язку.
Застосовуються зазвичай у малопотужних системах. Це, з одного боку, простотою послідовних коригувальних пристроїв, з другого боку, недоцільністю застосування у цих системах громіздких, порівнянних з розмірами виконавчого двигуна таких паралельних коригувальних пристроїв, як тахогенератор.
Слід мати на увазі, що через насичення підсилювачів не завжди доцільно здійснювати формування бажаної ЛАЧХ в діапазоні низьких та середніх частот за рахунок послідовного включення до системи інтегруючих та інтегродиференціюючих ланцюгів або інших елементів з аналогічними характеристиками. Тому часто для формування в діапазоні низьких та середніх частот застосовуються зворотні зв'язки.
Синтез коригувальних ланцюгів зустрічно-паралельного типу
При виборі місця включення коригувального ланцюга слід керуватися такими правилами:
- Охоплювати слід ті ланки, які суттєво негативно впливають на вигляд бажаної ЛАЧХ.
- Нахил лачх ланок, не охоплених зворотним зв'язком, вибирають близьким до нахилу в діапазоні середніх частот. Виконання цієї умови дозволяє мати простий коригуючий ланцюг.
- Коригуючий зворотний зв'язок повинен охоплювати якнайбільше ланок з нелінійними характеристиками. У межі необхідно прагнути до того, щоб серед ланок, не охоплених зворотним зв'язком, був елементів з нелінійними характеристиками. Таке включення зворотний зв'язок дозволяє значно зменшити вплив нелінійності характеристик елементів, охоплених зворотним зв'язком, працювати системи.
- Зворотний зв'язок має охоплювати ланки з більшим передатним коефіцієнтом. Тільки в цьому випадку дія зворотного зв'язку буде ефективною.
- Сигнал на вхід зворотного зв'язку повинен зніматися з елемента, що має достатню потужність, щоб включення зворотного зв'язку не навантажувало його. Сигнал із виходу зворотного зв'язку повинен, як правило, подаватися на вхід елементів системи, що мають великий вхідний опір.
- При виборі місця включення зворотного зв'язку всередині контуру з коригуючим зворотним зв'язком бажано, щоб нахил ЛАЧХ в діапазоні частот становив 0 або 20 дБ/дек. Виконання цієї умови дозволяє мати простий коригуючий ланцюг.
Часто роблять охоплення підсилювального тракту системи або охоплення силової частини системи. Коригувальні зворотні зв'язки застосовуються зазвичай у потужних системах.
Переваги КООС:
- Зменшується залежність показників якості системи від змін параметрів елементів незмінної частини системи, оскільки в суттєвому діапазоні частот передавальна функція ділянки системи, охопленого зворотним зв'язком, визначається зворотною величиною передавальної функції зустрічно-паралельного пристрою, що коректує. Тому вимоги до елементів вихідної системи менш жорсткі, ніж за послідовної корекції.
- Нелінійні характеристики елементів, охоплених зворотним зв'язком, лінеаризуються, оскільки передатні властивості охопленої ділянки системи визначаються параметрами контуру ланцюга зворотного зв'язку.
- Живлення зустрічно-паралельних коригувальних пристроїв навіть у тому випадку, коли воно вимагає великої потужності, не викликає труднощів, тому що зворотний зв'язок зазвичай починається від кінцевих ланок системи з потужним виходом.
- Зустрічно-паралельні пристрої, що коригують, працюють при меншому рівні перешкод, ніж послідовні, так як сигнал, що надходить на них, проходить через всю систему, що є фільтром низьких частот. Завдяки цьому ефективність дії зустрічно-паралельних коригувальних пристроїв при накладенні перешкод на сигнал помилки знижується менше, ніж послідовних пристроїв, що коректують.
- На відміну від послідовного коригувального пристрою зворотний зв'язок дозволяє реалізувати найбільшу постійну часу бажаної ЛАЧХ при порівняно невеликих значеннях власних постійних часу.
Недоліки:
- Зустрічно-паралельні КУ часто містять дорогі або громіздкі елементи (наприклад, тахогенератори, що диференціюють трансформатори).
- Підсумовування сигналу зворотного зв'язку та сигналу помилки слід реалізувати так, щоб зворотний зв'язок не шунтував вхід підсилювача.
- Контур, утворений коригуючим зворотним зв'язком, може виявитися нестійким. Скорочення запасів стійкості у внутрішніх контурах погіршує надійність функціонування системи загалом.
Методи визначення:
- аналітичні;
- Графо-аналітичні;
- Модельно-експериментальні.
Після розрахунку зустрічно-паралельного коригувального ланцюга слід перевірити стійкість внутрішнього контуру. Якщо розімкнути головний зворотний зв'язок, а внутрішній контур нестійкий, то елементи системи можуть вийти з ладу. Якщо внутрішній контур нестійкий, то його стійкість забезпечується послідовним коригуючим ланцюгом.
Наближений метод побудови ЛЧХ коректуючого негативного зворотного зв'язку
Нехай структурна схема проектованої
Системи наведено до виду, зображеного
На рис.1.
коригуючий зворотний зв'язок;
Передатна
функція розімкнутої вихідної (нескоректованої)
системи.
Для такої структурної схеми передатна функція скоригованої розімкнутої системи.
В діапазоні частот, де,рівняння запишеться так
Тобто.
Умова вибору; (1)
- рівняння вибору (у діапазонах низьких та високих частот) (2)
В діапазоні частот, де,
Умова вибору; (3)
отримаємо,
тобто,
звідки - рівняння вибору(у діапазоні середніх частот). (4)
Тоді алгоритм побудови наступний:
- Будуємо.
- Будуємо.
- Будуємо і визначаємо діапазон частот, де ця характеристика більша за нуль (умова вибору (3)).
- З конкретної технічної реалізації системи, визначається, тобто. місця входу та виходу коригувального зворотного зв'язку.
- Будуємо.
- У виділеному діапазоні частот будуємо логарифмічну частотну характеристику коригувального ланки, віднімаючи з рівняння вибору (4).
- У низькочастотній ділянці, де (умова вибору (1)), вибираємо таким, щоб виконувалося рівняння вибору (2): .
- У високочастотній області нерівність (2) зазвичай виконується при нахилі асимптоти 0 дБ/дек.
- Нахил і довжину сполучних асимптот вибирають, виходячи з простоти схемної реалізації коригувального пристрою.
- По ЛАЧХ визначаємо та проектуємо принципову схему коригувального ланки.
приклад. Нехай задані в. Визначено ланки, що охоплюються зворотним зв'язком. Потрібно збудувати. Побудова виконана на рис.2. Вихідна система мінімально-фазова. Після побудови слід перевірити контур, що розраховується на стійкість.
Точний метод побудови ЛЧХ ланки коригувального зворотного зв'язку
Якщо потрібно суворо витримувати задані показники якості, потрібно розраховувати точні значення частотних характеристик коригуючого ланцюга.
Вихідна структурна схема нескоректованої САУ
Перетворена структурна схема
Скоригована САУ Еквівалентна структурна схема

Введемо позначення: , (1)
тоді.
Це дозволяє скористатися номограмами замикання та знайти і.
Припустимо, що й відомі. Користуємося номограмою замикання у зворотному порядку:
, => , .
Тоді з виразу
ЛЧХ зустрічно-паралельного коригувального ланцюга:
Для вибору параметрів коригувального ланцюга необхідно ЛАЧХ подати в асимптотичній формі.
Побудова ЛЧХ прямої паралельної коригувальної ланки
Структурну схему проектованої системи перетворимо на вигляд рис.1.
І тут доцільно розглядати передатну функцію.
Частотні характеристики і визначаються аналогічно частотним характеристикам послідовного коригувального ланцюга.
В діапазоні частот, де характеристики
тобто. коригуючий ланцюг не впливає на роботу системи, а в діапазоні частот, де характеристики
та поведінка системи визначається параметрами прямого паралельного ланцюга.
У діапазоні частот, де, доцільно щодо ЛЧХ і уявити паралельно включені ланки як, де, .
ЛЧХ послідовного коригувального пристрою та побудуємо, як і раніше. Використовуючи номограму замикання, знайдемо і, нарешті, .
Проектування коригувального пристрою
Критерії якості КУ:
- Надійність;
- Низька вартість;
- Простота схемної реалізації;
- Стійкість;
- Перешкодозахищеність;
- Мале енергоспоживання;
- Простота виробництва та експлуатації.
Обмеження:
- Не рекомендується встановлення в одному коригуючому ланці конденсаторів або резисторів, номінали яких відрізняються на два-три порядки.
- ЛАЧХ коригувальних ланок може мати протяжність за частотою трохи більше 2-3 декад, ослаблення амплітудою трохи більше 20-30 дБ.
- Передавальний коефіцієнт пасивного чотириполюсника не слід проектувати менше ніж 0,05-0,1.
- Номінали резисторів в активних ланках, що коригують:
а) у ланцюзі зворотного зв'язку не більше 1-1,5 МОм і не менше десятків ком;
б) у ланцюзі прямого каналу від десятків ком до 1 МОм.
- Номінали конденсаторів: одиниці мкФ сотні пкФарад.
Види коригувальних ланок
- Пасивні чотириполюсники ( R - L - C-ланцюга).
Якщо, то вплив навантаження на інформаційні процеси можна знехтувати. .
Вихідний сигнал у цих ланцюгах слабший (або дорівнює за рівнем) вхідного.
приклад. Пасивна інтегро-диференціююча ланка.
де.
Переважання диференціюючого ефекту забезпечується у разі, якщо величина ослаблення k<0.5 или иначе.
Так як опір є найбільшим, то розрахунок елементів коригувального ланцюга доцільно починати з умови, задаючи.

Позначимо, звідки;
визначимо проміжний параметр =>
звідси, k = D.
Вхідний опір ланки на постійному струмі,
на змінному струмі
При узгодженні за опорами достатньою умовою постійному струмі є виконання співвідношення,
на змінному струмі.
- Активні чотириполюсники.
Якщо передаточний коефіцієнт підсилювача >>1.
приклад . Активна реальна ланка першого порядку, що диференціює.
Причому .
¦ підбирається при налагодженні (установка нуля підсилювача).
на змінному струмі, але в постійному струмі вхідний опір одно.
Вихідний опір операційних підсилювачів становить десятки Ом і визначається в основному величинами резисторів у колекторних ланцюгах вихідних транзисторів.
Схема забезпечує випередження не у всій області частот, а лише у певній смузі біля частоти зрізу системи, розташованої зазвичай у діапазоні низьких та середніх частот вихідної САУ. Ідеальна ланка сильно підкреслює високі частоти, в області яких розташовується спектр перешкод, що накладаються на корисний сигнал, тоді як реальний контур передає їх без істотного посилення.
- Диференціюючий трансформатор.

Опір ланцюга первинної обмотки трансформатора.
коефіцієнт трансформації трансформатора.
Передатна функція стабілізуючого трансформатора при
має вигляд,
Де, індуктивність трансформатора в режимі холостого ходу; .
- Пасивні чотириполюсники змінного струму.
У ланцюгах змінного струму можна використовувати коригувальні ланцюги постійного струму.
Схема включення коригувальних кіл наступна:
Узгодження елементарних коригувальних ланок
Виготовляється:
- По навантаженням активних ланок (струми навантаження підсилювачів нічого не винні перевищувати гранично допустимих величин);
- По опорам вихід вхід (на постійному струмі і верхній частоті діапазону роботи системи).
Величини навантажень операційних підсилювачів задаються в технічних умовах їх застосування і зазвичай становлять понад 1 кім.

Примітка. Знак<< означает меньше как минимум в 10 раз.
Вимоги до операційних підсилювачів:
- Коефіцієнт посилення за напругою.
- Малий дрейф нуля.
- Великий вхідний опір (100 кОм 3МОм).
- Малий вихідний опір (десятки Ом).
- Частотний діапазон роботи (смуга пропускання).
- Напруга джерела живлення +5В, але не менше 10В.
- Конструктивне виконання (кількість підсилювачів в одному корпусі).
Типові регулятори
Типи регуляторів:
- П-регулятор (грец. statos стоїть; статичний регулятор формує пропорційний закон регулювання);
При збільшенні k п зменшується встановлена помилка, але посилюються шуми виміру, що призводить до підвищення активності виконавчих елементів (працюють ривками), механічна частина зношується і суттєво зменшується термін служби обладнання.
Недоліки:
● неминуче відхилення регульованої величини від заданого значення, якщо об'єкт статичний;
● уповільнена реакція регулятора на збурюючі дії на початку перехідного процесу.
- І-регулятор (інтегральний);
- ПД-регулятор (пропорційно-диференціальний);
- ПІ-регулятор (пропорційно-інтегральний);
- ¦ ПІД-регулятор (пропорційно-інтегрально-диференціальний);
- Релейний регулятор.
Регулятор типу Д застосовується у зворотному зв'язку, а ДІ не застосовується.
Ці регулятори у багатьох випадках можуть забезпечитиприйнятне керування, легко налаштовуються та дешеві за масового виробництва.
ПД-регулятор
Структурна схема:

форсуюча ланка.
реальна передатна функція ПД-регулятора.
закон регулювання.

(1) без регулятора;
(2) П-регулятор;
(3) ПД-регулятор.
Переваги ПД-регулятора:
- Збільшується запас стійкості;
- Істотно покращується якість
регулювання (зменшується коливність
І час перехідного
процесу).
Недоліки ПД-регулятора:
- Низька точність регулювання (статика роботи
вихідної системи не змінюється при k п =1);
- Перешкоди на високих частотах посилюються і
порушується робота системи за рахунок насичення
підсилювачів;
- Важко реалізується практично.
Реалізація ПД-регулятора
Сигнали вхідного впливу та зворотного зв'язку підсумовуються просто.
Якщо змінити знаки вхідного впливу та зворотного зв'язку, то до виходу регулятора слід підключити інвертор.
Стабілітрони у зворотному зв'язку операційного підсилювача призначені для обмеження рівня вихідного сигналу заданою величиною.
У вхідних ланцюгах і включаються за потребою. Бажано, щоб. Якщо виключити, підсилювач через дії перешкод може увійти в режим насичення. Підбираються (величина до 20 кім).
Передатна функція регулятора по каналу керування:
ПІ-регулятор
(грец. isos - рівний, dromos біг; ізодромний регулятор)


На низьких частотах переважає інтегруючий ефект (відсутня статична помилка), а на високих частотах ефект від (якість перехідного процесу краще, ніж при І-законі регулювання).
закон регулювання.
- відсутність регулятора;
- П-регулятор;
- | ПІ-регулятор.
Переваги:
- Простота реалізації;
- Істотно покращує точність регулювання у статиці:
Помилка, що встановилася при постійному вхідному впливі дорівнює нулю;
Ця помилка нечутлива до змін параметрів об'єкта.
Недоліки : підвищується астатизм системи на одиницю і, як наслідок, зниження запасів стійкості, збільшується коливність перехідного процесу, збільшується.
Реалізація ПІ-регулятора
ПІД-регулятор
На низьких частотах переважає інтегруючий ефект, а на високих | диференціюючий.
закон регулювання.
Статична система при встановленні ПІД-регулятора стає астатичною (статична помилка дорівнює нулю), однак у динаміці астатизм знімається за рахунок дії диференціюючої складової, тобто якість перехідного процесу покращується.
Переваги:
- Висока статична точність;
- Висока швидкодія;
- Великий запас стійкості.
Недоліки:
- Застосовні для систем, що описуються
диференціальними рівняннями невисокого
порядку, коли об'єкт має один чи два полюси
або може бути апроксимований моделлю другого
порядку.
- Вимоги до якості керування середні.
Реалізація ПІД-регулятора

де, причому.
По ЛАЧХ операційного підсилювача визначаємо. Тоді передатна функція реального регулятора має вигляд.
У системах найчастіше застосовується ПІД – регулятор.
- Для об'єктів із запізненням, інерційна частина яких близька ланці першого порядку, доцільно застосовувати ПІ регулятор;
- Для об'єктів із запізненням, інерційна частина яких має порядок, найкращим регулятором є ПІД регулятор;
- ПІД регулятори ефективні з точки зору зменшення встановленої помилки і поліпшення виду перехідної характеристики, коли об'єкт управління має один або два полюси (або може бути апроксимований моделлю другого порядку);
- Коли процес регулювання характеризується високою динамічністю, як, наприклад, в САУ потоку або тиску, диференційуючу складову не застосовують, щоб уникнути явища самозбудження.
Розрахунок систем комбінованого керування
КомбінованеТаке керування в автоматичній системі, коли поряд із замкнутим контуром регулювання по відхиленню використовується зовнішній компенсуючий пристрій по впливах, що задають або обурюють.
Принцип інваріантностіпринцип компенсації динамічної та статичної помилок незалежно від форми вхідного впливу по каналу управління або компенсації впливу, що обурює.
інваріантної по відношенню до
впливу, що обурює, якщо після завершення перехідного процесу,
визначається початковими умовами, регульована величина та помилка системи не
залежить від цього впливу.
Система автоматичного регулювання єінваріантної по відношенню до
що впливає, якщо після завершення перехідного процесу, що визначається
Початковими умовами, помилка системи залежить від цього впливу.
- Розрахунок компенсуючих пристроїв по каналу обурення
Нехай структурна схема вихідної системи перетворена на вид, зображений
на рис.1.
Перенесемо на вхід системи точку застосування обурення (рис. 2).

Запишемо рівняння для вихідної координати: .
Вплив на вихідну функцію з боку обурення f буде відсутня, якщо виконується умоваабсолютної інваріантностісистеми до впливу, що обурює:
Умова повної компенсації обурення.
Зовнішні регулятори використовуються для отримання інваріантності каналом обурення з точністю до , оскільки порядок знаменника зазвичай вищий за порядок чисельника.
приклад . Нехай об'єкт і регулятор поводяться як аперіодичні ланки. Найбільший постійний час, як правило, належить об'єкту.
Тоді
Графіки на рис. 3.
Компенсуючий ланцюг має володіти диференціюючими властивостями, причому активними диференціюючими властивостями на високих частотах (оскільки характеристика частково розташовується вище осі частот).
Досягнення абсолютної інваріантності неможливе, проте ефект компенсації може бути значним навіть за простого компенсуючого ланцюга, що забезпечує реалізацію в обмеженому діапазоні частот (на рис. 3).
Технічно важко і не завжди можливо виміряти обурення, тому при проектуванні систем часто використовують непрямі методи вимірювання впливів, що обурюють.
2. Розрахунок систем із компенсацією помилки по каналу управління
Для цієї системи структурна схема якої зображена на рис. 4, справедливі наступні співвідношення:
¦ передавальна функція помилково.
Можемо домогтися умови повної компенсації помилки, якщо вибрати ланцюг з параметрами:
(1) ¦ умова абсолютної інваріантності системи до помилки по каналу управління.
Слідкуючі системи реалізуються астатичними. Розглянемо приклад таких систем (рис.5).
В області високих частот диференціювання другого порядку компенсуючого ланцюга призводить до насичення підсилювачів при високому рівні перешкод. Тому здійснюється наближена реалізація, що дає відчутний ефект регулювання.
Астатичні системи характеризуються добротністю | передавальний коефіцієнт k визначається за =1 та = k .
Якщо k =10, то помилка 10%, оскільки
Система низької якості (рис.6).
Введемо компенсуючий ланцюг з передавальною функцією
Таким ланцюгом може бути тахогенератор, якщо
Вхід механічний. Реалізація системи з малою добротністю
Проста.
Нехай із умови (1) отримаємо.
Тоді, маючи систему з астатизмом 1-го порядку, отримаємо систему з
астатизм другого порядку (рис.7).
Завжди Y відстає від керуючого сигналу; ввівши, зменшуємо помилку. Ланцюг, що компенсує, не впливає на стійкість.
Як правило, компенсуюча ланка повинна володіти властивостями, що диференціюють, і реалізовуватися з використанням активних елементів. Точне виконання умови абсолютної інваріантності неможливе у вигляді технічної недоцільності отримання похідної вище другого порядку (в контур регулювання вводиться високий рівень перешкод, зростає складність пристрою, що компенсує) і інерційності реальних технічних пристроїв. Кількість апериодических ланок в компенсувальному пристрої проектують рівним числу елементарних ланок, що форсують. Постійні часу аперіодичних ланок розраховують за умовою роботи ланок у значній області частот, тобто.
Принцип побудови багатоконтурної САУ із каскадним включенням регуляторів називаютьпринципом підпорядкованого регулювання.
Синтез САУ підпорядкованого регулювання з двома та більше контурами проводиться шляхом послідовної оптимізації контурів, починаючи з внутрішнього.
∆θ
,
град
∆ L,
дБ
W та (p)
W A1 (p)
1/Т p
1/Т 0
Інші схожі роботи, які можуть вас зацікавити. |
|||
| 2007. | Динамічний режим систем автоматичного керування | 100.64 KB | |
| Динамічний режим САУ. Рівняння динаміки Встановлений режим не є характерним для САУ. Таким чином, основним режимом роботи САУ вважається динамічний режим, що характеризується перебігом у ній перехідних процесів. Тому друге основне завдання розробки САУ є аналіз динамічних режимів роботи САУ. | |||
| 12933. | СИНТЕЗ ДИСКРЕТНИХ СИСТЕМ УПРАВЛІННЯ | 221.91 KB | |
| Завдання синтезу цифрових пристроїв управління У випадках коли замкнута дискретна система складена з функціонально необхідних елементів є нестійкою чи його показники якості не задовольняють необхідним виникає її корекції чи завдання синтезу пристрою управління. В даний час найбільш раціональним шляхом побудови пристроїв управління є використання обчислювальних машин, що управляють, або спеціалізованих цифрових обчислювачів ЦВ... | |||
| 2741. | СИНТЕЗ СИСТЕМ УПРАВЛІННЯ З ЗВОРОТНИМ ЗВ'ЯЗКОМ | 407.23 KB | |
| Побудуємо перехідні та частотні характеристики безперервної та дискретної моделі: Мал. Перехідна характеристика безперервної системи Рис. Перехідна характеристика дискретної системи Частотні характеристики безперервної системи Мал. | |||
| 3208. | Основи аналізу та побудови систем автоматичного регулювання | 458.63 KB | |
| Для заданого динамічного об'єкта розробити самостійно, чи з літератури взяти схему системи автоматичного регулювання, працюючої за принципом відхилення. Розробити варіант комбінованої системи, що включає контури управління з відхилення та обурення. | |||
| 5910. | Системи автоматичного керування з ЦВМ | 928.83 KB | |
| Останні два десятиліття значно підвищилася надійність і знизилася вартість цифрових комп'ютерів. У зв'язку з цим вони все ширше стали застосовуватися в системах управління як регулятори. За час, що дорівнює періоду квантування, комп'ютер здатний виконати велику кількість обчислень і сформувати вихідний сигнал, який використовується для управління об'єктом | |||
| 5106. | Основні види дослідження систем керування: маркетингові, соціологічні, економічні (їх особливості). Основні напрямки вдосконалення систем управління | 178.73 KB | |
| В умовах динамічності сучасного виробництва та суспільного устрою управління має перебувати у стані безперервного розвитку, який сьогодні неможливо забезпечити без дослідження шляхів та можливостей цього розвитку | |||
| 14277. | Введення в аналіз, синтез та моделювання систем | 582.75 KB | |
| Строго кажучи розрізняють три гілки науки системи, що вивчає: системологію теорію систем яка вивчає теоретичні аспекти та використовує теоретичні методи теорія ймовірностей теорія ігор та ін. Організація системи пов'язана з наявністю деяких причиннонаслідкових зв'язків у цій системі. Організація системи може мати різні форми наприклад біологічну інформаційну екологічну економічну соціальну тимчасову просторову і вона визначається причиннонаслідковими зв'язками в матерії та соціумі. У... | |||
| 5435. | Удосконалення системи автоматичного керування процесом згущення шламів | 515.4 KB | |
| Гранулят «Уралкалія» в основному експортується до Бразилії, США та Китаю, де він надалі використовується або для безпосереднього внесення в ґрунт, або поєднується з азотними та фосфорними добривами. | |||
| 20340. | АНАЛІЗ І СИНТЕЗ СИСТЕМИ УПРАВЛІННЯ НА ПІДПРИЄМСТВІ | 338.39 KB | |
| Удосконалення системи управління, а також сьогоднішня практика управління в сучасних умовах вказують на гостру проблему потреби у дослідницькому підході як до управління, підприємством, так і його вдосконалення та розвитку. | |||
| 1891. | Синтез дискретного модального закону управління методом Л.М. Бойчука | 345.04 KB | |
| За функцією W(z) скласти опис дискретного об'єкта у просторі станів. Перевірити виконання умов керованості та спостережуваності даного об'єкта. | |||
Метод ЛЧХ є одним з найбільш поширених методів синтезу автоматичного управління, так як побудова ЛЧХ, як правило, може виконуватися практично без обчислювальної роботи. Особливо зручно використовувати асимптотичні «ідеальні» ЛАЧХ.
Процес синтезу зазвичай включає наступні операції;
1. Побудова ЛАЧХ незмінної частини системи.
Незмінна частина системи регулювання містить об'єкт регулювання та виконавчий елемент, а також основний елемент зворотного зв'язку та елемент порівняння ЛАЧХ незмінної частини будують за передатною функцією розімкнутої незмінної частини системи.
2. Побудова бажаної частини ЛАЧХ.
Графік бажаної ЛАЧХ робиться на основі тих вимог, які пред'являються до проектованої системи керування. Бажану ЛАЧХ Lж умовно можна розділити на три частини: низькочастотну, середньочастотну та високочастотну.
2.1 Низькочастотну частину визначає статичну точність системи, точність в режимах, що встановилися. У статичній системі низькочастотна асимптота паралельна осі абсцис. У астатичній системі нахил цієї асимптоти становить –20мдБ/дек, де - порядок астатизму ( =1,2). Ордината низькочастотної частини Lж визначається значенням передавального коефіцієнта розімкнутої системи. Що ширша низькочастотна частина Lж, то більше високих частот відтворюється системою без замкнутого ослаблення.
2.2 Середньочастотна частина є найбільш важливою, оскільки вона визначає стійкість, запас стійкості і, отже, якість перехідних процесів, зазвичай оцінюється показниками якості перехідної характеристики. Основні параметри среднечастотной асимптоти -це її нахил і частота зрізу ср (частота коли Lж перетинає вісь абсцис). Чим більший нахил середньочастотної асимптоти, тим важче забезпечити хороші динамічні властивості системи. Тому найбільш доцільний нахил -20дБ/дек і дуже рідко він перевищує -40дБ /дек Частота зрізу ср визначає швидкодію системи, і значення величини перерегулювання. Чим більше пор, тим вище швидкодія, тим менше час регулювання Тпп перехідної характеристики, тим більше перерегулювання .
2.3 Високочастотна частина ЛАЧХ незначно впливає динамічні властивості системи. Краще мати можливо більше нахил її асимптоти, що зменшує необхідну потужність виконавчого органу та вплив високочастотних перешкод. Іноді при розрахунку високочастотну ЛАЧХ не беруть до уваги.

де - Коефіцієнт, що залежить від величини перерегулювання ,
Має бути обраний за графіком наведеним малюнку 1.

Малюнок 18- Графік визначення за допустимому перерегулюванню коефіцієнта .
Ордината низькочастотної асимптоти визначається відповідно до коефіцієнта
ентом посилення та нахилом високочастотної асимптоти перехідної, розімкнутої CAP.
3. Визначення параметрів коригуючого пристрою.
3.1 Графік ЛАЧХ коригувального пристрою виходить відніманням із значення графіка бажаної ЛАЧХ значень графіка незмінної, після чого по ЛАЧХ коригувального пристрою визначається його передатна функція.
3.2 За передатною функцією регулятора підбирається електрична схема для реалізації коригувального пристрою та розраховуються значення її параметрів. Схема регулятора може бути пасивних чи активних елементах.
3.3 Передатна функція коригувального пристрою, отримана в пункті 3.1, включається в узагальнену структурну схему САУ Використовуючи узагальнену структурну схему скоригованої САУ, за допомогою ЕОМ будуються графіки перехідних процесів, які повинні бути не гіршими за задані.
Приклад:
6.Синтез системи автоматичного керування методом логарифмічних частотних характеристик.
Синтез лінійних САУ
Основні поняття про синтез систем керування
Усі математичні завдання, розв'язувані в теорії автоматичного управління, можна об'єднати у два великі класи – задачі аналізу та задачі синтезу автоматичних систем.
У завданнях аналізу повністю відома структура системи, задані всі (як правило) параметри системи, і потрібно оцінити будь-яку її статистичну чи динамічну властивість. До завдань аналізу відносяться розрахунок точності в режимах, визначення стійкості, оцінка якості системи.
Завдання синтезу можна як зворотні завданням аналізу: у них потрібно визначити структуру і параметри системи за заданими показниками якості. Найпростішими завданнями синтезу є, наприклад, завдання визначення передавального коефіцієнта розімкнутого контуру за заданою помилкою або умовою мінімуму інтегральної оцінки.
Під синтезом лінійних САУ розуміється вибір такої структурної схеми, її параметрів, характеристик, що відповідають з одного боку заданим показникам якості та простоти технічної реалізації та надійності з іншого боку.
Особливості синтезу
САУ включає об'єкт управління і коригувальні пристрої (це такі пристрої, структура і параметри яких змінюються у відповідність із завданням синтезу).
Завдання показників якості окреслюється верхня межа допустимих показників якості, т.ч. задані показники якості визначають область прийняття рішень. Тому при синтезі вибирають критерій оптимізації, що дозволяє визначити однозначний вибір структури та параметрів САР.
Для сучасних САУ процедура синтезу визначає орієнтовну характеристику САУ, тому остаточний результат виходить у результаті аналізу (налаштування, моделювання) синтезованої САУ.
Етапи синтезу САУ
Аналізується об'єкт управління, визначаються статичні та динамічні характеристики об'єкта.
Визначається критерій оптимізації, що ґрунтується на заданих показниках якості САУ.
Будується структурна схема САУ, вибираються технічні засоби реалізації.
Синтез оптимальної динамічної характеристики.
Апроксимація оптимального динамічного режиму, тобто. вибір динамічних характеристик (бажаних), що відповідають заданим показникам якості та простоті технічної реалізації коригувальних пристроїв.
Визначення динамічних характеристик пристроїв, що коректують, які забезпечують бажані динамічні характеристики всієї системи.
Вибір схеми та способу технічної реалізації коригувальних пристроїв за заданою динамічною характеристикою коригувального пристрою.
Аналіз синтезованих САУ.
Синтез систем методом ЛАЧХ
Існує два способи включення коригувальних пристроїв:
Послідовно до об'єкта керування.
Тут W 0 (p) - Передатна функція об'єкта, а W кор (р)– передатна функція коригувального пристрою.
ПеревагоюПослідовною схемою включення є простота технічної реалізації.
Недоліки:висока чутливість даної схеми до перешкод; сильна залежність змін параметрів об'єкта.
Паралельно до частини об'єкта.
Д

Недоліки:коригуючий пристрій даної схеми реалізується дорогими схемами, на відміну від схеми (1).
Як динамічні характеристики, якими здійснюється синтез САУ, вибирається ЛАЧХ розімкнутої системи об'єкта, т.к. по ній досить легко визначити параметри об'єкта.
Бажана ЛАЧХ
При побудові бажаної ЛАЧХ виділяють три діапазони частот:
Низьких частот ( з). Цей діапазон частот відбиває статичні характеристики.
Діапазон середніх частот ( з). Визначає динамічні характеристики об'єкта при ступінчастій вхідній дії.
Діапазон високих частот ( з). Даний діапазон частот не впливає на статику, а визначає динамічні характеристики об'єкта при швидкозмінному вхідному впливі.
Модальний регулювальник.
Є методом кореневого синтезу, а саме, за бажаним розташуванням коренів характеристичного рівняння на комплексній площині будується модальний регулятор, який є коефіцієнтами негативного зворотного зв'язку по кожній динамічній змінній.

Дано опис об'єкта:

Задаємо видом бажаного полінома D жел (p) – відповідно до заданих (бажаних) показників якості.
Введемо зворотний зв'язок, виду:

де  - Характеристичне рівняння системи із регулятором.
- Характеристичне рівняння системи із регулятором.
Приклад: Дана система рівнянь


n 1 U x 1 x 2 x 3


Потрібно розглянути матрицю керованості:

 Система керована, оскільки ранг дорівнює порядку системи
Система керована, оскільки ранг дорівнює порядку системи
Вибираємо бажаний поліном так само, як і система:
D жел (p)=(p+w 0 ) 3 =p 3 +3p 2 w 0 +3pw 0+ w 0 3


 - Оцінка якості, де
- Оцінка якості, де  - час перехідного процесу
- час перехідного процесу
При вибраному значенні  отримуємо:
отримуємо:
K oc1 = 2; K oc2 = -1; K oc3 =5;
Керованість та спостережуваність.
Система називається керованою, якщо, змінюючи будь-який із вхідних сигналів, можна досягти бажаного значення на виході системи за кінцевий час.

без неї система буде некерованою, а з нею -
керованої.
Критерій керованості.
Для того, щоб система була керована необхідно і достатньо, щоб ранг матриці керованості дорівнював n (порядок об'єкта).
Загалом матриця керованості є прямокутною. Якщо система має один вхід, то матриця має розмірність  .
.
Спостережуваність.
Система називається спостерігається, якщо за вихідними сигналами Y можна відновити змінні стани X.
Спостережуваність, на відміну вимірюваності передбачає як вимірювання змінних станів X, і навіть обчислення не вимірюваних змінних X по виміряним.
Вимірюваність – це випадок, коли можна заміряти будь-яку змінну.
Критерій спостережуваності.
Для того, щоб система була спостерігається необхідно і достатньо, щоб ранг матриці спостерігання дорівнював n (порядок об'єкта).