Frekvenčná metóda syntézy automatických riadiacich systémov. Syntéza samohybných zbraní metódou logaritmických frekvenčných charakteristík
Odoslanie dobrej práce do databázy znalostí je jednoduché. Použite nižšie uvedený formulár
Študenti, postgraduálni študenti, mladí vedci, ktorí pri štúdiu a práci využívajú vedomostnú základňu, vám budú veľmi vďační.
Uverejnené dňa http://www.allbest.ru//
Uverejnené dňa http://www.allbest.ru//
Ministerstvo školstva a vedy Ruskej federácie
Federálna štátna rozpočtová vzdelávacia inštitúcia vysokého školstva Ivanovo Štátna chemicko-technologická univerzita technickej kybernetiky a automatizácie.
KURZOVÁ PRÁCA
Disciplína: Teória automatické ovládanie
Téma: Syntéza automatických riadiacich systémov
Ivanovo 2016
Prechodová funkcia riadiaceho objektu
Stôl 1. Prechodová funkcia riadiaceho objektu.
anotácia
V tejto kurzovej práci je predmetom štúdia stacionárny inerciálny objekt s oneskorením, reprezentovaný prechodovou funkciou, ako aj jeho riadiaci systém.
Výskumnými metódami sú prvky teórie automatického riadenia, matematického a simulačného modelovania.
Pomocou identifikačných, aproximačných a grafických metód sa získali modely objektov vo forme prenosových funkcií a zostavil sa model, ktorý čo najpresnejšie popisuje daný objekt.
Po výbere objektového modelu boli vykonané výpočty parametrov ladenia regulátora pomocou metód Ziegler-Nichols a rozšírených frekvenčných charakteristík.
Na určenie metódy, ktorou sa našli najlepšie nastavenia regulátora uzavretého automatického riadiaceho systému, bola vykonaná jeho simulácia v r. Prostredie Matlab pomocou balíka Simulink. Na základe výsledkov simulácie bola zvolená metóda na výpočet nastavení regulátora, ktoré najlepšie spĺňajú dané kvalitatívne kritérium.
Uskutočnila sa aj syntéza viacrozmerného systému riadenia objektov: kaskádový riadiaci systém, kombinovaný riadiaci systém, autonómny riadiaci systém. Vypočítali sa nastavenia PI regulátorov a kompenzátorov, získali sa reakcie na typické vplyvy Automatický regulátor regulačnej frekvencie
Zoznam kľúčových slov:
Riadiaci objekt, regulátor, nastavenia, riadiaci systém.
Informácie o objeme:
Objem práce - strán
Počet stolov -
Počet ilustrácií - 32
Počet použitých zdrojov - 3
Úvod
V tejto práci na kurze sú počiatočnými údajmi funkcia prechodu riadiaceho objektu pozdĺž jedného z dynamických kanálov. Je potrebné vykonať parametrickú identifikáciu objektu špecifikovaného prechodovou funkciou pomocou grafickej metódy, aproximačných a identifikačných metód.
Na základe získaných údajov zistíme, ktorý model presnejšie vystihuje daný objekt. Riešenie tohto problému je pomerne naliehavý problém, keďže často nemáme k dispozícii samotný matematický model, ale iba jeho krivku zrýchlenia.
Po výbere modelu objektu vypočítame parametre PI regulátora. Výpočet sa vykonáva pomocou metód Ziegler-Nichols a rozšírených frekvenčných charakteristík. Aby bolo možné určiť, akou metódou boli nájdené najlepšie nastavenia regulátora, používame ako kritérium kvality stupeň útlmu procesu.
V tejto práci bola vykonaná syntéza riadiaceho systému pre viacrozmerný objekt troch typov: autonómny, kaskádový, kombinovaný. Vypočítali sa nastavenia regulátorov a študovali sa reakcie systému cez rôzne kanály na typické vplyvy.
Táto práca v kurze je vzdelávacia. Zručnosti získané pri jeho realizácii je možné využiť pri realizácii kurzová práca o modelovaní riadiacich systémov a záverečnej kvalifikačnej práci.
1. Identifikácia objektu kontroly
1.1 Identifikácia pomocou aplikácie Identifikácia systému ToolBox
Identifikácia je určenie vzťahu medzi výstupnými a vstupnými signálmi na kvalitatívnej úrovni.
Na identifikáciu používame balík System Identification ToolBox. Postavme si model v Simulinku.
Obr.1.1.1. Schéma identifikácie.
Pomocou príkazu ident prejdite do System Identification ToolBox.
Obr.1.1.2. System Identification ToolBox.
Importujte údaje do System Identification ToolBox:
Obr.1.1.3. Importujte údaje
Získame koeficienty prenosovej funkcie:
Obr.1.1.4. Výsledky identifikácie
K = 44,9994 T = 9,0905
1.2 Aproximácia pomocou nástroja Curve Fitting Toolbox
Aproximácia alebo aproximácia je metóda, ktorá vám umožňuje študovať číselné charakteristiky a vlastnosti objektu, čím sa problém redukuje na štúdium jednoduchších alebo pohodlnejších objektov.
Na aproximáciu používame balík Curve Fitting Toolbox Model zostavujeme v simulinku bez lag odkazu.
Obr.1.2.1. Schéma vykonávania aproximácie.
Pomocou príkazu cftool prejdite na panel nástrojov Curve Fitting Toolbox. Vyberáme čas pozdĺž osi x a výstupné hodnoty pozdĺž osi y. Objekt popíšeme funkciou a-b*exp(-c*x). Dostaneme koeficienty a,b a s.
Obr.1.2.2. Približné výsledky.
K=(a+b)/2=45 T=
1.3 Aproximácia pomocou elementárnych väzieb (grafická metóda)
Obr.1.3.1. Grafická metóda
Určujeme čas oneskorenia. Na určenie K nakreslíme priamku od stanovenej hodnoty k osi y. Ak chcete určiť časovú konštantu, nakreslite dotyčnicu ku krivke, kým nepretína ustálenú hodnotu s čiarou, nakreslite kolmicu na os x z priesečníka a od výslednej hodnoty odčítajte čas oneskorenia.
K = 45 T = 47
1.4 Porovnanie prechodových funkcií
Na porovnanie týchto troch metód vypočítame chybu každej metódy, nájdeme súčet štvorcových chýb a nájdeme rozptyl. Na tento účel zostavíme model v Simulinku a dosadíme získané parametre.
Obr.1.4.1. Porovnanie prechodových funkcií.
Na získanie parametrov prenosovej funkcie skúmaného objektu boli použité tri metódy. Kritériom na vyhodnotenie výsledného matematického modelu objektu je rozptyl chyby tohto ukazovateľa najlepšie výsledky označené v metóde priblíženia pomocou nástroja Curve Fitting Tool. Ďalej berieme ako matematický model objektu: W=45/(1/0,022222+1)*e^(-22,5p).
2. Voľba regulačného zákona
Regulátor vyberieme z pomeru
Vyberieme teda PI regulátor.
3. Syntéza ACS s jednorozmerným objektom
3.1 Výpočet ACS pomocou metódy Ziegler-Nichols
Ziegler-Nicholsova metóda je založená na Nyquistovom kritériu. Podstatou metódy je nájsť proporcionálny regulátor, ktorý privedie systém s uzavretou slučkou k hranici stability, a nájsť pracovnú frekvenciu.
Pre danú prenosovú funkciu nájdeme fázovo-frekvenčnú charakteristiku a vykreslíme jej graf.
Definujme pracovnú frekvenciu ako úsečku priesečníka charakteristiky fázovej odozvy c. Pracovná frekvencia je 0,082.
Ryža. 3.1.1 Zistenie prevádzkovej frekvencie
Vypočítajme nastavenie PI regulátora Vypočítajte koeficient Kcr:
Zo získanej hodnoty vypočítame koeficient úmernosti:
Vypočítame čas izodrómu:
Poďme nájsť vzťah:
Ryža. 3.1.2 Reakcia systému cez riadiaci kanál na krokovú funkciu
Ryža. 3.1.3 Reakcia systému cez poruchový kanál na skokovú funkciu
Ryža. 3.1.4 Odozva systému cez poruchový kanál na impulznú funkciu
Ryža. 3.1.5 Reakcia systému cez riadiaci kanál na pulznú funkciu
Vypočítajme stupeň útlmu pomocou vzorca:
Zistíme priemernú hodnotu stupňa útlmu 0,93 a porovnáme ju so skutočnou hodnotou 0,85.
3.2 Výpočet ACS pomocou metódy rozšírenej frekvenčnej odozvy
Táto metóda je úplne založená na použití modifikovaného Nyquistovho kritéria (kritérium E. Dudnikova), ktoré hovorí: ak je systém s otvorenou slučkou stabilný a jeho rozšírená amplitúdová charakteristika prechádza bodom so súradnicami [-1, j0] , potom bude systém s uzavretou slučkou nielen stabilný, ale bude mať aj určitú hranicu stability, určenú stupňom oscilácie.
- (3.2.1) rozšírená frekvenčná odozva systému s otvorenou slučkou;
-(3.2.2) rozšírená fázová odozva systému s otvorenou slučkou.
Pre PI regulátor majú rozšírené frekvenčné charakteristiky tvar:
Výpočet v prostredí Mathcad:
pre W = 0,85 m = 0,302
Vypočítajme nastavenia PI regulátora v prostredí Mathcad:
Prejdime do oblasti rozšírených frekvenčných charakteristík objektu. Ak to chcete urobiť, urobme náhradu:
Prejdime do oblasti rozšírených frekvenčných charakteristík regulátora:
Rozšírená amplitúdovo-frekvenčná odozva regulátora:
Rozšírená fázovo-frekvenčná odozva regulátora:
Po niekoľkých transformáciách rovnice (3.2.6) dostaneme:
Zostavme si graf:
Obr.3.2.1 Nastavenie parametrov pomocou metódy rozšírenej frekvenčnej odozvy
Z grafu vypočítame maximálnu hodnotu Kp/Tu pri prvom otočení a zodpovedajúcu hodnotu Kp:
Kp = 0,00565 Kp/Tu = 0,00034
Poďme študovať odozvu systému na typické signály cez riadiace a poruchové kanály.
Funkcia prechodu cez riadiaci kanál:
Ryža. 3.2.2 Reakcia systému cez riadiaci kanál na krokovú funkciu
Prechodová funkcia pozdĺž kanála rušenia:
Ryža. 3.2.3 Reakcia systému cez poruchový kanál na skokovú funkciu
Funkcia prechodu impulzov pozdĺž kanála rušenia:
Ryža. 3.2.4 Odozva systému cez poruchový kanál na impulznú funkciu
Funkcia impulzného prechodu na riadiacom kanáli:
Ryža. 3.2.5 Reakcia systému cez riadiaci kanál na pulznú funkciu
Vypočítajme stupne útlmu:
Pre prechodnú funkciu na riadiacom kanáli
Pre prechodovú funkciu pozdĺž kanála rušenia
Pre funkciu pulzného prechodu pozdĺž kanála rušenia
Pre funkciu impulzného prechodu cez riadiaci kanál
Zistíme priemernú hodnotu stupňa útlmu 0,98 a porovnáme ju so skutočnou hodnotou 0,85.
Metódou rozšírených frekvenčných charakteristík a metódou Ziegler-Nichols boli vypočítané parametre ladenia PI regulátora a stupeň útlmu. Priemerná hodnota stupňa útlmu získaná metódou Ziegler-Nichols prevyšuje skutočnú hodnotu o 9,41 %. Priemerná hodnota stupňa útlmu získaná metódou rozšírených frekvenčných charakteristík prekročila skutočnú hodnotu o 15,29 %. Z toho vyplýva, že je lepšie použiť hodnoty získané metódou Ziegler-Nichols.
4. Syntéza automatických riadiacich systémov pre viacrozmerný objekt
4.1 Syntéza kaskádových riadiacich systémov
Kaskádové systémy sa používajú na automatizáciu objektov, ktoré majú veľkú zotrvačnosť pozdĺž riadiaceho kanála, ak je možné vybrať medziľahlú súradnicu, ktorá je menej zotrvačná vo vzťahu k najnebezpečnejším poruchám a použiť pre ňu rovnakú regulačnú akciu ako pre hlavný výstup. objektu.
Ryža. 4.1.1 Kaskádový riadiaci systém
V tomto prípade sú súčasťou riadiaceho systému dva regulátory - hlavný (externý) regulátor, ktorý slúži na stabilizáciu hlavného výstupu objektu y, a pomocný (vnútorný) regulátor, určený na reguláciu pomocnej súradnice y1. Úlohou pre pomocný ovládač je výstupný signál hlavného ovládača.
Výpočet kaskádového ASR zahŕňa určenie nastavení hlavného a pomocného regulátora pre dané dynamické charakteristiky objektu pozdĺž hlavného a pomocného kanála. Keďže nastavenia hlavného a pomocného regulátora sú vzájomne prepojené, vypočítavajú sa pomocou iteračnej metódy.
V každom kroku iterácie sa vypočíta znížená jednoslučková ASR, v ktorej jeden z regulátorov podmienečne odkazuje na ekvivalentný objekt. Ekvivalentným objektom pre hlavný regulátor je sériové spojenie uzavretej pomocnej slučky a hlavného riadiaceho kanála; jeho prenosová funkcia sa rovná:
(4.1.1.)
Ekvivalentný objekt pre pomocný ovládač je paralelné pripojenie pomocný kanál a hlavný systém s otvorenou slučkou. Jeho prenosová funkcia má tvar:
(4.1.2.)
V závislosti od prvého iteračného kroku existujú dve metódy na výpočet kaskádových ACP:
1. spôsob. Výpočet začína hlavným regulátorom. Metóda sa používa v prípadoch, keď je zotrvačnosť pomocného kanála oveľa menšia ako zotrvačnosť hlavného kanála.
V prvom kroku sa predpokladá, že prevádzková frekvencia hlavného obvodu je oveľa nižšia ako pomocného obvodu. potom:
(4.1.3.)
Teda, pri prvom priblížení, nastavenia hlavného ovládača nezávisia od nastavení pomocného ovládača a nachádzajú sa podľa WE0main(p).
V druhom kroku sa vypočítajú nastavenia pomocného ovládača pre ekvivalentný objekt.
V prípade približných výpočtov sú prvé dva kroky obmedzené. Pre presné výpočty sa pokračuje, kým sa nastavenia ovládača nájdené v dvoch po sebe nasledujúcich iteráciách nezhodujú so špecifikovanou presnosťou.
2. spôsob. Výpočet začína pomocným regulátorom. Prvý krok predpokladá, že externý regulátor je deaktivovaný, t.j.:
Ako prvé priblíženie sa teda zistí nastavenie pomocného regulátora pomocou jednookruhového ACP pre pomocný riadiaci kanál. V druhom kroku sa nastavenia hlavného ovládača vypočítajú z prenosovej funkcie ekvivalentného objektu WE1osn(p), pričom sa zohľadnia nastavenia pomocného ovládača. Na objasnenie nastavení pomocného ovládača sa výpočet vykonáva pomocou prenosovej funkcie, do ktorej sa nahradia nájdené nastavenia hlavného ovládača. Výpočty sa vykonávajú dovtedy, kým sa nastavenia pomocného ovládača, nájdené v dvoch po sebe nasledujúcich iteráciách, nezhodujú so špecifikovanou presnosťou.
Vypočítajme parametre pomocného PI regulátora:
Obr.4.1.2. Reakcia na postupný vplyv cez riadiaci kanál
Obr.4.1.3. Reakcia na postupné ovplyvňovanie pozdĺž kanála poruchy
Obr.4.1.4. Reakcia na impulz cez riadiaci kanál
Obr.4.1.5. Reakcia na impulzné pôsobenie cez poruchový kanál
Systém je kovariantný k úlohe a invariantný k poruche. Hlavné kritérium kvality je splnené - typ procesu prechodu. Druhé kvalitatívne kritérium v podobe času kontroly nie je splnené. Kritériá splnené dynamická chyba.
4.2 Syntéza kombinovaného riadiaceho systému
Existuje prípad, keď sú na objekt aplikované rigidné vplyvy, ktoré je možné merať, ale nie je navrhnutý jednoslučkový riadiaci systém, ale takzvaný kombinovaný systém, ktorý je kombináciou dvoch princípov - princípu spätnej väzby a tzv. princíp kompenzácie rušenia.
Navrhuje sa zachytiť poruchy pred ich dopadom na objekt a pomocou pomocného regulátora kompenzovať ich pôsobenie.
Obr.4.2.1. Kombinovaný riadiaci systém
Aplikujme na diagram znázornený na obr. 4.2.1, podmienka pre nemennosť výstupnej hodnoty y vzhľadom na rušivý vplyv yв:
Princíp invariantnosti voči poruche: aby bol systém invariantný voči poruche, jeho prenosová funkcia pozdĺž riadiaceho kanála sa musí rovnať nule. Potom bude napísaná prenosová funkcia kompenzátora:
(4.2.2.)
Poďme vypočítať PI regulátor v Mathcade pomocou štandardných Newtonových binomických foriem:
Kroková akcia pozdĺž riadiaceho kanála:
Obr.4.2.2. Reakcia na postupný vplyv cez riadiaci kanál
Stupňovitý dopad pozdĺž kanála rušenia:
Obr.4.2.3. Reakcia na postupné ovplyvňovanie pozdĺž kanála poruchy
Impulzné pôsobenie cez riadiaci kanál:
Obr.4.2.4. Reakcia na impulz cez riadiaci kanál
Impulzné pôsobenie cez kanál rušenia:
Obr.4.2.5. Reakcia na impulzné pôsobenie cez poruchový kanál
Systém je kovariantný k úlohe a invariantný k poruche. Kritérium kvality v podobe času kontroly nie je splnené. Kritérium dynamickej chyby nie je splnené. Systém je invariantný voči poruche v statike, ale neinvariantný v dynamike v dôsledku inerciálnych vlastností svojich prvkov.
4.3 Syntéza autonómny systém zvládanie
Pri správe viacrozmerných objektov sa často stretávame s nasledujúcim obrázkom:
Ryža. 4.3.1 Riadiaci objekt s dvomi vstupnými a dvomi výstupnými premennými
X1,X2 - riadiace premenné
Y1,Y2 - riadené veličiny
U1,U2 - priame spojenia
P1, P2 - krížové spojenia.
Ak pre výstupnú premennú y1 zvolíme ako regulačnú veličinu premennú x2, potom bude regulačná veličina x2 v dôsledku krížových kanálov ovplyvňovať premennú y1 cez prenosovú funkciu W21 a regulačná veličina x1 bude ovplyvňovať y2 až W12. Tieto okolnosti výrazne komplikujú výpočet tohto typu systému.
Výpočtová úloha sa výrazne zjednoduší, ak sú na systém kladené ďalšie požiadavky - požiadavky na autonómiu riadiacich kanálov. Autonómiu riadiacich kanálov možno dosiahnuť zavedením dodatočných spojení medzi vstupnými premennými, zariadenia tohto druhu sa nazývajú kompenzátory.
Ryža. 4.3.2 Dvojrozmerný systém riadenia objektov
V dôsledku zavedenia kompenzátorov vznikli nové regulačné premenné, ktoré ovplyvňujú pôvodné premenné s prihliadnutím na kompenzačné efekty.
Vypočítame prenosové funkcie kompenzátorov:
Parametre ladenia PI regulátorov vypočítavame pomocou štandardných Newtonových binomických foriem.
Poďme vypočítať prvý PI regulátor v Mathcad:
Poďme vypočítať druhý PI regulátor v Mathcade:
Prechodová funkcia na prvom riadiacom kanáli:
Ryža. 4.3.3. Reakcia systému na postupný vplyv
Prechodová funkcia na druhom riadiacom kanáli:
Ryža. 4.3.4. Reakcia systému na postupný vplyv
Systém je kovariantný k úlohe a invariantný k poruche. Hlavné kritérium kvality je splnené - typ procesu prechodu. Druhé kvalitatívne kritérium v podobe času je splnené.
Záver
V prvom odseku práce boli zvážené metódy používané na identifikáciu funkcií špecifikovaných v tabuľkách. Zvažovali sa tri metódy: metóda identifikácie pomocou System Identification ToolBox, metóda aproximácie pomocou balíka Curve Fitting Toolbox a metóda aproximácie pomocou elementárnych väzieb. Na základe výsledkov aproximácie bol vybraný najvhodnejší model. Ukázalo sa, že ide o model získaný aproximáciou pomocou nástroja Curve Fitting Tool.
Potom sa určil riadiaci zákon a nastavenia PI regulátora sa vypočítali pomocou dvoch metód: metódy rozšírenej frekvenčnej odozvy a metódy Ziegler-Nichols. Pri porovnávaní stupňov útlmu sa zistilo, že je lepšie použiť hodnoty získané metódou Ziegler-Nichols.
Štvrtým bodom práce v kurze bolo modelovanie systémov. Uskutočnili sme syntézu riadiacich systémov pre viacrozmerný objekt. Pre tieto systémy boli vypočítané kompenzátory rušenia, ako aj PI regulátory, na výpočet ktorých boli použité štandardné Newtonove binomické formy. Získali sa reakcie systémov na typické vstupné vplyvy.
Zoznam použitých zdrojov
Teória automatického riadenia: učebnica pre vysoké školy / V. Ya. Rotach. - 5. vyd., prepracované. a dodatočné - M.: Vydavateľstvo MPEI, 2008. - 396 s., ill.
Modálne kontrolné a pozorovacie zariadenia / N.T. Kuzovkov. - M.: „Strojárstvo“, 1976. - 184 s.
Matlab Consulting Center [Elektronický zdroj] // MATLAB.Exponenta, 2001-2014. URL: http://matlab.exponenta.ru. Dátum prístupu: 3.12.2016.
Uverejnené na Allbest.ru
...Podobné dokumenty
Analýza alternatívnej metódy rozšírenej frekvenčnej odozvy. Implementácia programu v prostredí MatLab, za účelom výpočtu nastavení regulátora pomocou prenosovej funkcie riadiaceho objektu, kvalitatívnych parametrov prechodového procesu automatického riadiaceho systému s uzavretou slučkou.
laboratórne práce, doplnené 11.5.2016
Metóda rozšírenej frekvenčnej odozvy. Preskúmanie požiadaviek na ukazovatele kvality. Počítačové metódy syntéza automatických riadiacich systémov v prostredí Matlab. Konštrukcia vedenia rovnakého útlmu systému. Definícia optimálne nastavenia regulátora
laboratórne práce, doplnené 30.10.2016
Výpočet poskytovania diskrétneho regulátora maximálna rýchlosť proces prechodu. Tvorba integrálneho kvadratického kritéria. Syntéza kompenzátora, spojitý a diskrétny regulátor, kompenzátor, zákon optimálneho riadenia.
kurzová práca, pridané 19.12.2010
Výber ovládača pre riadiaci objekt s danou prenosovou funkciou. Analýza objektu riadenia a automatického riadiaceho systému. Odhad prechodových a impulzných funkcií riadiaceho objektu. Schematické diagramy regulátor a porovnávacie zariadenie.
kurzová práca, pridané 09.03.2012
Výber a zdôvodnenie typov regulátorov polohy, rýchlosti, prúdu, výpočet parametrov ich nastavenia. Syntéza riadiaceho systému pomocou modálnych a symetrických optimálnych metód. Konštrukcia prechodových charakteristík riadeného objektu na základe riadených veličín.
kurzová práca, pridané 01.04.2012
Popis objektu automatického riadenia v premenných stavoch. Stanovenie diskrétnej prenosovej funkcie lineárneho analógovo-digitálneho systému s uzavretou slučkou. Grafy prechodovej odozvy, riadiaceho signálu a frekvenčných charakteristík systému.
kurzová práca, pridané 21.11.2012
Syntéza riadiaceho systému pre kvázistacionárny objekt. Matematický model nestacionárneho dynamického objektu. Prenosové funkcie väzieb riadiaceho systému. Konštrukcia požadovaných logaritmických amplitúdovo-frekvenčných a fázovo-frekvenčných charakteristík.
kurzová práca, pridané 14.06.2010
Stanovenie dynamických charakteristík objektu. Stanovenie a konštrukcia frekvenčných a časových charakteristík. Výpočet optimálnych nastavení pre PI regulátor. Kontrola stability pomocou Hurwitzovho kritéria. Konštrukcia procesu prechodu a jeho kvalita.
kurzová práca, pridané 04.05.2014
Štúdium režimov automatického riadiaceho systému. Stanovenie prenosovej funkcie systému s uzavretou slučkou. Konštrukcia logaritmických amplitúdových a fázových frekvenčných charakteristík. Syntéza systému "objekt-regulátor", výpočet optimálnych parametrov.
kurzová práca, pridané 17.06.2011
Formulácia systémových požiadaviek a výpočet parametrov elektrického pohonu. Syntéza regulátora prúdu. Výpočet regulátora rýchlosti. Štúdium prechodných procesov v podriadenom riadiacom systéme pomocou programu "Matlab". Syntéza reléového systému.
Úlohou korekcie je zvýšiť presnosť systémov v ustálenom aj prechodnom režime. Vzniká, keď túžba znížiť chyby riadenia v štandardných režimoch vedie k potrebe použiť také hodnoty zisku automatického riadiaceho systému s otvorenou slučkou, pri ktorom bez prijatia špeciálnych opatrení (inštalácia ďalších prepojení - nápravných zariadení) systém sa ukáže ako nestabilný.
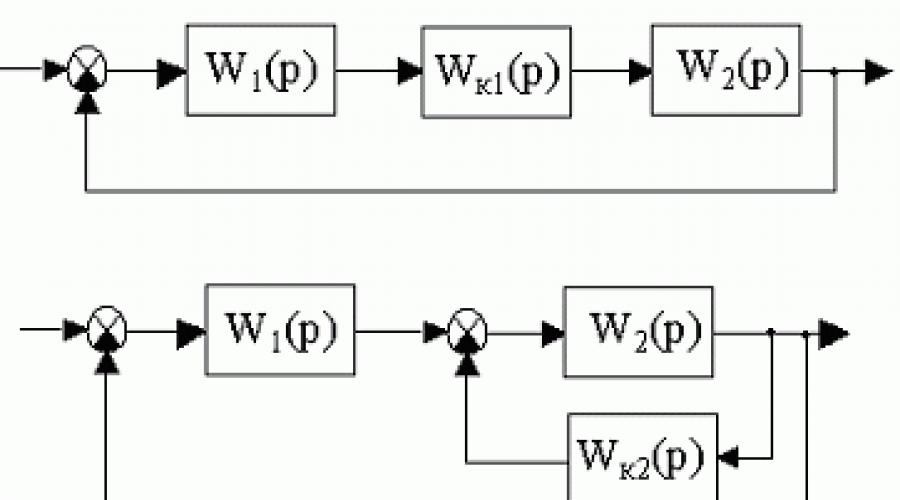
| Druhy korekčných zariadení |
Existujú tri typy hlavných korekčných zariadení (obr. 6.1): sériové (W k1 (p)), vo forme lokálnej spätnej väzby (W k2 (p)) a paralelné (W k3 (p)).

Obr.6.1. Štrukturálne diagramy korekčné zariadenia.
Metóda korekcie pomocou sekvenčných korekčných zariadení je jednoduchá vo výpočtoch a ľahko technicky implementovaná. Tak našiel široké uplatnenie, najmä pri opravách systémov, ktoré využívajú elektrické obvody s nemodulovaným signálom. Sekvenčné korekčné zariadenia sa odporúčajú na použitie v systémoch, v ktorých nedochádza k posunu parametrov spojenia. V opačnom prípade je potrebná úprava korekčných parametrov.
Korekcia riadiacich systémov pomocou paralelného korekčného zariadenia je účinná pri potrebe vysokofrekvenčného posunu zotrvačných spojov. V tomto prípade sa vytvárajú pomerne zložité zákony riadenia so zavedením derivácií a integrálov chybového signálu so všetkými z toho vyplývajúcimi nevýhodami.
Korekcia lokálnou (lokálnou) spätnou väzbou sa využíva najčastejšie v automatických riadiacich systémoch. Výhodou korekcie vo forme lokálnej spätnej väzby je výrazné oslabenie vplyvu nelinearít v charakteristikách spojov zaradených do lokálneho obvodu, ako aj zníženie závislosti nastavenia regulátora od driftu parametrov zariadenia.
Použitie jedného alebo druhého typu korekčného zariadenia, t.j. sériové linky, paralelné linky resp spätná väzba, je určená pohodlnosťou technickej realizácie. V tomto prípade by prenosová funkcia systému s otvorenou slučkou mala byť rovnaká s rôznymi zahrnutiami opravných prepojení:
Daný vzorec (6.1) vám umožňuje previesť jeden typ korekcie na iný, aby ste vybrali tú najjednoduchšiu a najľahšie implementovanú.
Katedra diaľky a korešpondencie
| Syntéza samohybných zbraní |
Syntéza systému je riadený výpočet, ktorého účelom je: vybudovanie racionálnej štruktúry systému; nájdenie optimálnych hodnôt parametrov jednotlivých odkazov. S mnohými možné riešenia spočiatku je potrebné formulovať technické požiadavky do systému. A s výhradou určitých obmedzení uložených na ACS je potrebné zvoliť optimalizačné kritérium - statická a dynamická presnosť, rýchlosť, spoľahlivosť, spotreba energie, cena atď.
Pri inžinierskej syntéze sú stanovené tieto úlohy: dosiahnutie požadovanej presnosti; zabezpečenie určitého charakteru prechodových procesov. V tomto prípade syntéza spočíva v určení typu a parametrov korekčných prostriedkov, ktoré je potrebné pridať do nemennej časti systému, aby sa zabezpečili ukazovatele kvality nie horšie ako špecifikované.
V inžinierskej praxi je najrozšírenejšia metóda frekvenčnej syntézy využívajúca logaritmické frekvenčné charakteristiky.
Proces syntézy riadiaceho systému zahŕňa nasledujúce operácie:
- konštrukcia dostupného LFC L 0 (ω) pôvodného systému W 0 (ω), pozostávajúceho z riadeného objektu bez regulátora a bez korekčného zariadenia;
- konštrukcia nízkofrekvenčnej časti požadovaného LFC na základe požiadaviek na presnosť (astatizmus);
- konštrukcia stredofrekvenčného úseku požadovaného LFC, poskytujúca špecifikovaný prekmit a riadiaci čas t p ACS;
- koordinácia nízkofrekvenčného so stredofrekvenčným úsekom požadovaného l.a.h. s výhradou získania najjednoduchšieho korekčného zariadenia;
- objasnenie vysokofrekvenčnej časti požadovaného L.A.H. na základe požiadaviek na zabezpečenie potrebnej miery stability;
- určenie typu a parametrov sekvenčného korekčného zariadenia L ku (ω) = L f (ω) - L 0 (ω), pretože Wf(p) = Wku(p)*Wo(p);
- technická realizácia nápravných zariadení. V prípade potreby sa vykoná prepočet na ekvivalentné paralelné spojenie alebo OS;
- overovací výpočet a konštrukcia prechodového procesu.
Výstavba želaného L.A.H. vyrábané po častiach.
Nízkofrekvenčná časť želaného l.a.h. je tvorená podmienkou zabezpečenia požadovanej presnosti činnosti riadiaceho systému v ustálenom stave, to znamená z podmienky, že ustálená chyba systému Δ() by nemala prekročiť stanovenú hodnotu Δ()≤Δ s .
Vytvorenie zakázanej nízkofrekvenčnej oblasti pre požadovanú L.A.H. Možno rôzne cesty. Napríklad pri aplikácii sínusového signálu na vstup musia byť zabezpečené nasledujúce prijateľné indikátory: Δ m - maximálna amplitúda chyby; v m - maximálna rýchlosť sledovania; ε m - maximálne zrýchlenie sledovania. Už skôr sa ukázalo, že chybová amplitúda pri reprodukcii harmonického signálu je Δ m =g m / W(jω k), t.j. je určená modulom prenosovej funkcie otvoreného ACS a amplitúdou vstupného vplyvu g m. Aby chyba ACS nepresiahla Δ s, požadovaná l.a.h. nesmie prejsť nižšie ako kontrolný bod A k so súradnicami: ω=ω k, L(ω k)= 20lg|W(jω k)| = 20 log g m/A m.
Známe vzťahy:
g(t) = gm sin(co kt); g"(t) = gm (co kt); g""(t) = -gmcok2sin(co kt);
vm = gm k; εm = gmcok2; gm = vm2/Em; ω k = εm/vm. (6.2)
Zakázaná oblasť zodpovedajúca systému s astatizmom 1. rádu a zabezpečujúcim prevádzku s požadovanou chybou v sledovaní amplitúdy, rýchlosti a zrýchlenia sledovania je znázornená na obr. 6.2.

Obr.6.2. Zakázaná oblasť požadovaného l.a.h.
Faktor kvality pre rýchlosť K ν =v m / Δ m, faktor kvality pre zrýchlenie K ε =ε m /Δ m. V prípade, že je potrebné zabezpečiť len statickú chybu riadenia pri privedení signálu g(t)=g 0 =const, potom je nízkofrekvenčný úsek požadovaného l.a.h. musí mať strmosť 0 dB/dec a musí prejsť na úrovni 20 lgK tr, kde Ktr (požadovaný zisk automatického riadiaceho systému s otvorenou slučkou) sa vypočíta podľa vzorca
Δ з ()=ε st =g 0 /(1+ Ktr), odkiaľ Ktr ≥ -1.
Ak je potrebné zabezpečiť sledovanie s danou presnosťou od referenčného vplyvu g(t) = νt pri ν = const, potom chyba rýchlosti v ustálenom stave ε sk () = ν/K tr. Odtiaľ nájdeme K tr =ν/ε ck a nakreslíme nízkofrekvenčnú časť požadovaného LAC so sklonom -20 dB/dec cez faktor kvality rýchlosti K ν = K tr =ν/ε ck alebo bod s súradnice: ω=1 s -1, L( 1)=20lgk tr dB.
Ako bolo ukázané skôr, stredofrekvenčná časť požadovaného L.A.H. poskytuje hlavné ukazovatele kvality prechodového procesu - prekmit σ a čas regulácie t p Stredofrekvenčný úsek želaného l.a.h. by mala mať sklon -20 dB/dec a pretínať frekvenčnú os na medznej frekvencii ω avg, ktorá je určená podľa nomogramov V. V. Solodovnikova (obr. 6.3). Odporúča sa vziať do úvahy poradie astatizmu navrhnutého systému a zvoliť ω avg podľa príslušného nomogramu.

Obr.6.3. Solodovnikov kvalitné nomogramy:
a - pre astatické samohybné delá 1. rádu; b - pre statické samohybné delá
Napríklad pre σ m = 35 % a t p = 0,6 s pomocou nomogramu (obr. 6.3, a) pre astatický systém 1. rádu získame t p = 4,33 π/ω avg alebo ω avg =21,7 s -1 .
Cez ω av =21,7 s -1 je potrebné nakresliť priamku so sklonom -20 dB/dec, pričom šírka stredofrekvenčného úseku sa určí z podmienky zabezpečenia požadovanej rezervy stability v module a fáze. . Existujú rôzne prístupy k vytváraniu rezerv stability. Je potrebné mať na pamäti, že čím vyššia je medzná frekvencia v systéme, tým skôr skutočnosť, že výpočty budú ovplyvnené chybou malých časových konštánt jednotlivých zariadení ACS, ktoré sa nezohľadňujú. Preto sa odporúča umelo zvyšovať hranice stability vo fáze a module so zvyšujúcim sa ω avg. Takže pre dva typy samohybných zbraní sa odporúča použiť tabuľku uvedenú v tabuľke. Keď sú vysoké požiadavky na kvalitu prechodných procesov, napr.
20%<σ m <24%;  ,
,
25%<σ m <45%;  ,
,
Odporúčajú sa tieto priemerné ukazovatele stability: φ zap =30°, Hm =12 dB, -Hm =10 dB.
Obrázok 6.4 ukazuje pohľad na stredofrekvenčný úsek požadovaného L.A.H., ktorého šírka poskytuje požadované okraje stability.

Obr.6.4. Strednofrekvenčná časť požadovaného l.a.h.
Potom sa úseky stredných a nízkych frekvencií spárujú s priamymi segmentmi so sklonom -40 alebo -60 dB/dec, aby sa získalo najjednoduchšie korekčné zariadenie.
Sklon vysokofrekvenčného úseku požadovaného L.A.H. Odporúča sa ponechať ho rovný sklonu vysokofrekvenčného úseku dostupného L.A.H. V tomto prípade bude korekčné zariadenie odolnejšie voči hluku. Koordinácia stredno- a vysokofrekvenčných úsekov želaného L.A.H. sa vykonáva aj s prihliadnutím na príjem jednoduchého korekčného zariadenia a navyše so zabezpečením potrebných rozpätí stability.
Prenosová funkcia požadovaného systému s otvorenou slučkou Ww(p) sa zistí podľa typu požadovaného l.a.h. Lf (co). Potom sa skonštruuje fázová frekvenčná odozva požadovaného ACS s otvorenou slučkou a prechodová odozva požadovaného systému s uzavretou slučkou a vyhodnotia sa skutočné ukazovatele kvality navrhnutého systému. Ak vyhovujú požadovaným hodnotám, tak konštrukcia želaného L.A.H. sa považuje za kompletný, v opačnom prípade sa musia skonštruované požadované LFC upraviť. Pre zníženie prekmitu rozšírte stredofrekvenčnú časť požadovanej l.a.h. (zvýšiť hodnotu ±H m). Na zlepšenie výkonu systému je potrebné zvýšiť medznú frekvenciu.
Na určenie parametrov sekvenčného korekčného zariadenia je potrebné:
a) odpočítať od požadovaného l.a.h. L k dispozícii l.a.h. L 0, t.j. nájsť l.a.h. zariadenie na minimálnu fázovú korekciu L ku;
b) podľa druhu l.a.h. sekvenčné korekčné zariadenie L ku zapíše jeho prenosovú funkciu a pomocou referenčnej literatúry vyberie konkrétny obvod a implementáciu.
Obrázok 6.5 ukazuje príklad určenia prenosovej funkcie sekvenčného korekčného zariadenia.

Obr.6.5. LAX dostupného L 0 , požadovaný L f systém s otvorenou slučkou
a sekvenčné korekčné zariadenie L ku
Po grafickom odčítaní dostaneme nasledujúcu prenosovú funkciu korekčného zariadenia

Paralelné korekčné zariadenie alebo korekčné zariadenie vo forme lokálnej spätnej väzby možno získať prepočtom pomocou vzorca (6.1).
Na základe získanej prenosovej funkcie W ku (p) je potrebné navrhnúť reálne korekčné zariadenie, ktoré je možné implementovať hardvérovo alebo softvérovo. V prípade hardvérovej implementácie je potrebné zvoliť obvod a parametre korekčného spoja. V literatúre sú tabuľky typických korekčných zariadení, pasívnych aj aktívnych, jednosmerných aj striedavých. V prípade, že sa používa na riadenie automatického riadiaceho systému počítača, je výhodnejšia softvérová implementácia.
© V.N. Bakaev, Vologda 2004. Vývoj elektronickej verzie: M.A. Gladyshev, I.A. Churáňov.
Štátna technická univerzita Vologda.
Katedra dištančného a korešpondenčného vzdelávania
V súčasnosti sa rozšírili systémy postavené na princípe podriadenej regulácie, ktorý je vysvetlený na obr. 6.6. Systém zabezpečuje n regulačných slučiek s vlastnými regulátormi W pi (p), pričom výstupný signál regulátora vonkajšej slučky je predpísaná hodnota pre vnútornú slučku, t.j. práca každého vnútorného okruhu je podriadená vonkajšiemu okruhu.

Obr.6.6. Bloková schéma ACS podriadenej regulácie
Fungovanie podriadených riadiacich systémov určujú dve hlavné výhody.
1. Jednoduché na výpočet a konfiguráciu. Nastavenie počas procesu uvádzania do prevádzky sa vykonáva od vnútorného okruhu. Každý okruh obsahuje regulátor, ktorého parametre a štruktúra vytvárajú štandardné charakteristiky. Navyše v každom okruhu je kompenzovaná najväčšia časová konštanta.
2. Pohodlie obmedzenia limitných hodnôt medziľahlých súradníc systému. To sa dosiahne obmedzením výstupného signálu externého regulátora slučky na určitú hodnotu.
Zároveň z princípu konštrukcie podriadeného riadiaceho systému je zrejmé, že rýchlosť každej vonkajšej slučky bude nižšia ako rýchlosť príslušnej vnútornej slučky. Ak je totiž v primárnom okruhu medzná frekvencia l.a.h. bude 1/2T μ, kde 2T μ je súčet malých nekompenzovaných časových konštánt, potom aj pri absencii iných väzieb s malými časovými konštantami vo vonkajšom obvode je medzná frekvencia jeho l.a.h. bude 1/4T μ atď. Preto sú podriadené riadiace systémy zriedkavo postavené s viac ako tromi okruhmi.
Zoberme si typický obvod na obr. 6.7 a upravme ho na modulárne (MO) a symetrické (SO) optimum.

Obr.6.7. Typická schéma zapojenia
Diagram na obr. 6.7 ukazuje: T μ - súčet malých časových konštánt;
T o - veľká časová konštanta podliehajúca kompenzácii; Kε a K O sú koeficienty zosilnenia blokov s malými časovými konštantami a riadiaceho objektu. Je potrebné poznamenať, že typ regulátora W p (p) závisí od typu spojenia, ktorého časová konštanta by mala byť kompenzovaná. Môže to byť P, I, PI a PID. Zoberme si PI regulátor ako príklad:
![]() .
.
Pre modulárne optimum vyberáme nasledujúce parametre:
![]()
Potom bude mať funkcia prenosu s otvorenou slučkou tvar:
![]()
Logaritmické frekvenčné charakteristiky zodpovedajúce prenosovej funkcii W(p) sú znázornené na obr. 6.8, a.

Obr.6.8. LFC a h(t) s modulárnou konfiguráciou
Pri krokovej regulácii výstupná hodnota prvýkrát dosiahne ustálenú hodnotu po čase 4,7 Tμ, prekmit je 4,3% a fázová rezerva je 63° (obr. 6.8, b). Prenosová funkcia automatického riadiaceho systému s uzavretou slučkou má formu

Ak charakteristickú rovnicu automatického riadiaceho systému s uzavretou slučkou znázorníme v tvare T 2 r 2 +2ξTr+1=0, potom má koeficient tlmenia pri modulárnom optime hodnotu ![]() . Zároveň je zrejmé, že čas riadenia nezávisí od veľkej časovej konštanty T o. Systém má astatizmus prvého rádu. Pri ladení systému na symetrické optimum zvoľte parametre PI regulátora nasledovne:
. Zároveň je zrejmé, že čas riadenia nezávisí od veľkej časovej konštanty T o. Systém má astatizmus prvého rádu. Pri ladení systému na symetrické optimum zvoľte parametre PI regulátora nasledovne:
![]()
Potom má funkcia prenosu s otvorenou slučkou tvar


Zodpovedajúce logaritmické frekvenčné charakteristiky a graf prechodového procesu sú uvedené na obr. 6.9.

Obr.6.9. LFC a h(t) pri ladení na symetrické optimum
Čas, keď výstupná hodnota prvýkrát dosiahne ustálenú hodnotu, je 3,1T μ, maximálny prekmit dosiahne 43%, fázová rezerva je -37°. Samohybná pištoľ získava astatizmus druhého rádu. Treba si uvedomiť, že ak je spoj s najväčšou časovou konštantou aperiodický 1. rádu, tak s PI regulátorom pri T o = 4T μ prechodové procesy zodpovedajú procesom pri ladení na MO. Ak T o<4Т μ , то настройка регулятора на τ=Т μ теряет смысл. Необходимо выбрать другой тип регулятора.
TAU pozná aj iné typy optimálneho nastavenia regulátora, napríklad:
- binomický, keď je charakteristická rovnica ACS prezentovaná v tvare (p+ω 0) n - kde ω 0 je modul n-násobnej odmocniny;
- Butterworth, keď charakteristické rovnice ACS rôznych rádov majú tvar 
Je vhodné použiť tieto nastavenia, keď systém používa modálne riadenie pre každú súradnicu.
© V.N. Bakaev, Vologda 2004. Vývoj elektronickej verzie: M.A. Gladyshev, I.A. Churáňov.
Štátna technická univerzita Vologda.
| Konštrukcia procesu prechodu |
Existujú tri skupiny metód na konštrukciu prechodných procesov: analytické; grafické, využívajúce frekvenčné a prechodové charakteristiky; konštrukcia prechodných procesov pomocou počítača. V najzložitejších prípadoch sa využívajú počítače, ktoré umožňujú okrem modelovania samohybných diel aj napojiť jednotlivé časti reálneho systému na stroj, t.j. blízko k experimentálnej metóde. Prvé dve skupiny sa využívajú najmä v prípade jednoduchých systémov, ako aj v štádiu predbežného výskumu, keď je systém výrazne zjednodušený.
Analytické metódy sú založené na riešení diferenciálnych rovníc systému alebo určení inverznej Laplaceovej transformácie prenosovej funkcie systému.
Výpočet prechodových procesov na základe frekvenčných charakteristík sa používa, keď sa analýza ACS od samého začiatku vykonáva pomocou frekvenčných metód. V inžinierskej praxi sa metóda lichobežníkových frekvenčných charakteristík, vyvinutá V.V. Solodovnikovom, rozšírila na hodnotenie ukazovateľov kvality a konštrukciu prechodných procesov v automatických riadiacich systémoch.
Zistilo sa, že ak na systém pôsobí vplyv jediného príkazu, t.j. g(t)=1(t) a počiatočné podmienky sú nulové, potom odozvu systému, ktorá je prechodovou charakteristikou, možno v tomto prípade definovať ako
 (6.3)
(6.3)
 (6.4)
(6.4)
kde P(ω) je skutočná frekvenčná odozva systému s uzavretou slučkou; Q(ω) je imaginárna frekvenčná odozva systému s uzavretou slučkou, t.j. Ф g (jω)=P(ω)+jQ(ω).
Konštrukčný postup spočíva v tom, že zostrojená reálna charakteristika P(ω) sa rozdelí na množstvo lichobežníkov, pričom približne zakrivené čiary sa nahrádzajú rovnými segmentmi, takže pri sčítaní všetkých súradníc lichobežníkov sa získa pôvodná charakteristika na obr. 6.10.

Obr.6.10. Reálne charakteristiky uzavretého systému
kde: ω рi a ω срi sú jednotná prenosová frekvencia a medzná frekvencia každého lichobežníka.
Potom sa pre každý lichobežník určí koeficient sklonu ω рi /ω срi a pomocou tabuľky h-funkcií sa zostrojia prechodné procesy z každého lichobežníka hi. Tabuľka h-funkcií udáva bezrozmerný čas τ. Na získanie reálneho času t i je potrebné vydeliť τ medznou frekvenciou daného lichobežníka. Proces prechodu pre každý lichobežník sa musí zvýšiť o P i (0) krát, pretože Tabuľka h-funkcií udáva prechodné procesy z jednotkových lichobežníkov. Prechodový proces ACS sa získa algebraickým sčítaním zostrojených h i procesov zo všetkých lichobežníkov.
© V.N. Bakaev, Vologda 2004. Vývoj elektronickej verzie: M.A. Gladyshev, I.A. Churáňov.
Štátna technická univerzita Vologda.
Katedra dištančného a korešpondenčného vzdelávania
| Otázky k téme č.6 |
1. Čo znamená zlepšovanie kvality procesu riadenia a ako sa to dosahuje?
2. Pomenujte lineárny štandardný zákon riadenia.
3. Povedzte nám o typických kontrolných zákonoch a typických regulátoroch.
4. Na čo slúžia korekčné prístroje? Uveďte, ako sú zahrnuté a ich vlastnosti.
5. Vysvetlite formuláciu problému syntézy systémov.
6. Uveďte fázy syntézy systému.
7. Vysvetlite konštrukciu požadovaného LAC navrhovaného systému.
8. Ako sa tvorí prenosová funkcia navrhnutého systému s otvorenou slučkou?
9. Ako sa určujú prenosové funkcie korekčných zariadení?
10. Aké sú výhody a nevýhody paralelných a sekvenčných korekčných zariadení?
11. Ako sa používajú „uzavieracie“ nomogramy?
12. Uveďte metódy konštrukcie prechodných procesov.
13. Ako určiť ustálenú hodnotu prechodového procesu pomocou reálnej charakteristiky?
14.Ako zmeniť požadované L.A.H. zvýšiť rezervy stability?
© V.N. Bakaev, Vologda 2004. Vývoj elektronickej verzie: M.A. Gladyshev, I.A. Churáňov.
Štátna technická univerzita Vologda.
Katedra dištančného a korešpondenčného vzdelávania
Téma č.7: Nelineárne samohybné delá
| Úvod |
Väčšina charakteristík reálnych zariadení je vo všeobecnosti nelineárna a niektoré z nich nemožno linearizovať, pretože majú diskontinuity druhého druhu a nie je na ne aplikovateľná po častiach lineárna aproximácia. Prevádzka reálnych prepojení (zariadení) môže byť sprevádzaná takými javmi, ako je saturácia, hysterézia, spätný chod, prítomnosť mŕtvej zóny atď. Nelinearity môžu byť prirodzené alebo umelé (zámerne zavedené). Prirodzené nelinearity sú systémom vlastné v dôsledku nelineárneho prejavu fyzikálnych procesov a vlastností jednotlivých zariadení. Napríklad mechanické vlastnosti asynchrónneho motora. Umelé nelinearity zavádzajú vývojári do systémov, aby zabezpečili požadovanú kvalitu práce: pre systémy, ktoré sú z hľadiska výkonu optimálne, využívajú reléové riadenie, prítomnosť nelineárnych zákonitostí vo vyhľadávacích a nehľadacích extrémnych systémoch, systémy s variabilnou štruktúrou , atď.
Nelineárny systém je systém, ktorý obsahuje aspoň jeden prvok, ktorého linearizácia nie je možná bez straty podstatných vlastností riadiaceho systému ako celku. Základné znaky nelinearity sú: ak niektoré súradnice alebo ich časové derivácie vstupujú do rovnice vo forme súčinov alebo mocnín odlišných od prvej; ak sú koeficienty rovnice funkciami nejakých súradníc alebo ich derivácií. Pri zostavovaní diferenciálnych rovníc pre nelineárne systémy najskôr zostrojte diferenciálne rovnice pre každé zariadenie v systéme. V tomto prípade sú charakteristiky zariadení, ktoré umožňujú linearizáciu, linearizované. Prvky, ktoré neumožňujú linearizáciu, sa nazývajú výrazne nelineárne. Výsledkom je systém diferenciálnych rovníc, v ktorom je jedna alebo viacero rovníc nelineárnych. Zariadenia, ktoré možno linearizovať, tvoria lineárnu časť systému a zariadenia, ktoré nemožno linearizovať, tvoria nelineárnu časť. V najjednoduchšom prípade je bloková schéma ACS nelineárneho systému sériovým zapojením nelineárneho prvku bez zotrvačnosti a lineárnej časti, pokrytej spätnou väzbou (obr. 7.1). Keďže princíp superpozície nie je použiteľný pre nelineárne systémy, pri vykonávaní štrukturálnych transformácií nelineárnych systémov je jediným obmedzením v porovnaní so štrukturálnymi transformáciami lineárnych systémov to, že nie je možné prenášať nelineárne prvky cez lineárne a naopak.

Ryža. 7.1. Funkčný diagram nelineárneho systému:
NE - nelineárny prvok; LC - lineárna časť; Z(t) a X(t)
respektíve výstup a vstup nelineárneho prvku.
Klasifikácia nelineárnych spojov je možná podľa rôznych kritérií. Najrozšírenejšia klasifikácia je založená na statických a dynamických charakteristikách. Prvé sú prezentované vo forme nelineárnych statických charakteristík a druhé vo forme nelineárnych diferenciálnych rovníc. Príklady takýchto charakteristík sú uvedené v. Na obr. 7.2. sú uvedené príklady jednohodnotových (bez pamäte) a viachodnotových (s pamäťou) nelineárnych charakteristík. V tomto prípade sa berie do úvahy smer (znamenie) rýchlosti vstupného signálu.

Obr.7.2. Statické charakteristiky nelineárnych prvkov
Správanie nelineárnych systémov v prítomnosti významných nelinearit má množstvo vlastností, ktoré sa líšia od správania lineárnych automatických riadiacich systémov:
1.
výstupná hodnota nelineárneho systému je neúmerná vstupnému efektu, t.j. parametre nelineárnych väzieb závisia od veľkosti vstupného vplyvu;
2.
Prechodné procesy v nelineárnych systémoch závisia od počiatočných podmienok (odchýlok). V tomto ohľade boli pre nelineárne systémy zavedené pojmy stability „v malom“, „vo veľkom“ a „všeobecne“. Systém je stabilný „v malom“, ak je stabilný pre malé (nekonečne malé) počiatočné odchýlky. Systém je stabilný „vo veľkom“, ak je stabilný pre veľké (konečné v rozsahu) počiatočné odchýlky. Systém je stabilný „ako celok“, ak je stabilný pre akékoľvek veľké (neobmedzené rozsahy) počiatočné odchýlky. Obrázok 7.3 ukazuje fázové trajektórie systémov: stabilné „vo všeobecnosti“ (a) a systémy, ktoré sú stabilné „vo veľkom“ a nestabilné „v malom“ (b);

Obr.7.3. Fázové trajektórie nelineárnych systémov
3.
nelineárne systémy sa vyznačujú režimom netlmených periodických kmitov s konštantnou amplitúdou a frekvenciou (samooscilácie), ku ktorým dochádza v systémoch pri absencii periodických vonkajších vplyvov;
4.
pri tlmených kmitoch prechodového procesu v nelineárnych systémoch je možná zmena periódy kmitov.
Tieto vlastnosti určili nedostatok všeobecných prístupov v analýze a syntéze nelineárnych systémov. Vyvinuté metódy umožňujú riešiť len lokálne nelineárne problémy. Všetky inžinierske metódy na štúdium nelineárnych systémov sú rozdelené do dvoch hlavných skupín: presné a približné. Medzi exaktné metódy patrí metóda A. M. Ljapunova, metóda fázovej roviny, metóda bodovej transformácie a frekvenčná metóda V. M. Popova. Približné metódy sú založené na linearizácii rovníc nelineárneho systému pomocou harmonickej alebo štatistickej linearizácie. Limity použiteľnosti tejto alebo tej metódy budú diskutované nižšie. Treba si uvedomiť, že v dohľadnej dobe je potreba ďalšieho rozvoja teórie a praxe nelineárnych systémov.
Silnou a efektívnou metódou na štúdium nelineárnych systémov je modelovanie, ktorého nástrojom je počítač. V súčasnosti sa mnohé analyticky ťažko riešiteľné teoretické a praktické problémy dajú pomerne jednoducho vyriešiť pomocou výpočtovej techniky.
Hlavné parametre charakterizujúce činnosť nelineárnych automatických riadiacich systémov sú:
1.
Prítomnosť alebo absencia vlastných oscilácií. Ak existujú vlastné oscilácie, potom je potrebné určiť ich amplitúdu a frekvenciu.
2.
Čas, kedy kontrolovaný parameter vstúpi do stabilizačného režimu (odozva).
3.
Prítomnosť alebo neprítomnosť posuvného režimu.
4.
Určenie špeciálnych bodov a špeciálnych trajektórií pohybu.
Toto nie je úplný zoznam študovaných ukazovateľov, ktoré sprevádzajú prevádzku nelineárnych systémov. Extrémne, samonastavovacie systémy s premenlivými parametrami vyžadujú vyhodnotenie a ďalšie vlastnosti.
© V.N. Bakaev, Vologda 2004. Vývoj elektronickej verzie: M.A. Gladyshev, I.A. Churáňov.
Štátna technická univerzita Vologda.
Katedra dištančného a korešpondenčného vzdelávania.
Myšlienka metódy harmonickej linearizácie patrí N.M. Krylov a N.N. Bogolyubova a je založená na nahradení nelineárneho prvku systému lineárnou väzbou, ktorej parametre sú určené pri harmonickom vstupnom pôsobení z podmienky rovnosti amplitúd prvých harmonických na výstupe nelineárneho prvku a ekvivalentné lineárne spojenie. Metóda je približná a možno ju použiť len v prípade, keď lineárnou časťou systému je dolnopriepustný filter, t.j. filtruje všetky harmonické zložky vznikajúce na výstupe nelineárneho prvku, okrem prvej harmonickej. V tomto prípade môže byť lineárna časť opísaná diferenciálnou rovnicou ľubovoľného rádu a nelineárny prvok môže byť buď jednohodnotový alebo viachodnotový.
Metóda harmonickej linearizácie (harmonická rovnováha) vychádza z predpokladu, že na vstup nelineárneho prvku sa aplikuje harmonický vplyv s frekvenciou ω a amplitúdou A, t.j. x = А sinωt. Za predpokladu, že lineárna časť je dolnopriepustný filter, je spektrum výstupného signálu lineárnej časti obmedzené iba prvou harmonickou určenou Fourierovým radom (ide o aproximáciu metódy, pretože vyššie harmonické sú vylúčené z úvahy). ). Potom je spojenie medzi prvou harmonickou výstupného signálu a vstupným harmonickým vplyvom nelineárneho prvku znázornené ako prenosová funkcia:
![]() (7.1)
(7.1)
Rovnica (7.1) sa nazýva rovnica harmonickej linearizácie a koeficienty q a q" sú koeficienty harmonickej linearizácie v závislosti od amplitúdy A a frekvencie ω vstupnej akcie. Pre rôzne typy nelineárnych charakteristík sú zhrnuté koeficienty harmonickej linearizácie. v tabuľke. Treba poznamenať, že pre statické jednohodnotové koeficienty q"(A)=0. Podriadením rovnice (7.1) Laplaceovej transformácii za nulových počiatočných podmienok, po ktorej nasleduje nahradenie operátora p jω (p = jω), dostaneme ekvivalentný komplexný koeficient prenosu nelineárneho prvku.
Wne (jω,A) = q + jq". (7.2)
Po vykonaní harmonickej linearizácie je možné na analýzu a syntézu nelineárnych automatických riadiacich systémov použiť všetky metódy používané na štúdium lineárnych systémov, vrátane použitia rôznych kritérií stability. Pri štúdiu nelineárnych systémov založených na metóde harmonickej linearizácie sa najskôr rieši otázka existencie a stability periodických (samooscilujúcich) režimov. Ak je periodický režim stabilný, potom systém obsahuje vlastné oscilácie s frekvenciou ω 0 a amplitúdou A 0 . Uvažujme nelineárny systém, ktorý obsahuje lineárnu časť s prenosovou funkciou
 (7.3)
(7.3)
a nelineárny prvok s ekvivalentným komplexným koeficientom prenosu (7.2). Vypočítaná bloková schéma nelineárneho systému má podobu obr. 7.5.

Obr.7.5. Bloková schéma nelineárneho samohybného riadiaceho systému
Pre posúdenie možnosti výskytu samokmitov v nelineárnom systéme pomocou metódy harmonickej linearizácie je potrebné nájsť podmienky hranice stability, ako to bolo urobené pri analýze stability lineárnych systémov. Ak je lineárna časť opísaná prenosovou funkciou (7.3) a nelineárny prvok (7.2), potom bude mať charakteristická rovnica uzavretého systému tvar
d(p) + k(p)(q(ω,A) + q"(ω,A)) = 0 (7.4)
Na základe Michajlovho kritéria stability bude hranicou stability prechod Michajlovho hodografu cez pôvod. Z výrazov (7.4) možno zistiť závislosť amplitúdy a frekvencie vlastných kmitov od parametrov systému, napríklad od koeficientu prenosu k lineárnej časti systému. K tomu je potrebné uvažovať koeficient prenosu k ako premennú hodnotu v rovniciach (7.4), t.j. napíš túto rovnicu v tvare:
d(jω) + K(jω)(q(ω,A) + q"(ω,A)) = Re(ω0,A0,K) +Jm(ω0,A0,k) = 0 (7.5)
kde ω o a A o sú možná frekvencia a amplitúda vlastných oscilácií.
Potom vynulovaním skutočných a imaginárnych častí rovnice (7.5)
 (7.6)
(7.6)
Objasnenie konštrukčného diagramu riadiaceho systému pre výber a výpočet jeho prvkov a parametrov. Experimentálne štúdium systému alebo jeho jednotlivých častí v laboratórnych podmienkach a vykonanie príslušných korekcií jeho obvodu a návrhu. Návrh a výroba riadiaceho systému. Nastavenie systému v reálnych prevádzkových podmienkach a skúšobnej prevádzke.
Zdieľajte svoju prácu na sociálnych sieťach
Ak vám táto práca nevyhovuje, v spodnej časti stránky je zoznam podobných prác. Môžete tiež použiť tlačidlo vyhľadávania
Prednáška č.6 Syntéza automatických riadiacich systémov
SYNTÉZA ACS výber štruktúry a parametrov ACS, počiatočných podmienok a vstupných vplyvov v súlade s požadovanými ukazovateľmi kvality a prevádzkovými podmienkami.
Návrh ACS zahŕňa vykonanie nasledujúcich krokov:
- Štúdium regulovaného objektu: zostavenie matematického modelu, určenie parametrov, charakteristík a prevádzkových podmienok objektu.
- Formulácia požiadaviek na ATS.
- Výber princípu ovládania; stanovenie funkčnej štruktúry (technická syntéza).
- Výber prvkov riadiacej schémy s prihliadnutím na statické, dynamické, energetické, prevádzkové a iné požiadavky a ich vzájomná koordinácia podľa statických a energetických charakteristík (postup nie je formalizovaný - inžinierska kreativita).
- Určenie algoritmickej štruktúry (teoretická syntéza) sa vykonáva pomocou matematických metód a na základe požiadaviek napísaných v prehľadnej matematickej forme. Stanovenie zákonitostí kontroly a výpočet nápravných zariadení, ktoré poskytujú špecifikované požiadavky.
- Objasnenie konštrukčného diagramu riadiaceho systému, výber a výpočet jeho prvkov a parametrov.
- Experimentálne štúdium systému (alebo jeho jednotlivých častí) v laboratórnych podmienkach a vykonanie príslušných korekcií jeho obvodu a návrhu.
- Návrh a výroba riadiaceho systému.
- Nastavenie systému v reálnych prevádzkových podmienkach (skúšobná prevádzka).
Návrh ACS začína výberom riadiaceho objektu a hlavných funkčných prvkov (zosilňovače, akčné členy atď.), To znamená, že je vyvinutá výkonová časť systému.
Stanovené statické a dynamické charakteristiky systému sú zabezpečené vhodnou voľbou konštrukcie a parametrov pohonnej jednotky, špeciálnych korekčných zariadení a celého ACS ako celku.
Účel korekčných zariadení: zabezpečiť požadovanú presnosť prevádzky systému a získať prijateľnú povahu prechodného procesu.
Korekčné väzby sa do systému zavádzajú rôznymi spôsobmi: sekvenčne, lokálne OOS, priame paralelné pripojenie, externé (mimo regulačnej slučky) kompenzačné zariadenia, pokrytie celého ACS stabilizačného OOS, nejednotková hlavná spätná väzba.
Typy jednosmerných elektrických korekčných zariadení: aktívne a pasívne jednosmerné štvorpóly, diferenciačné transformátory, jednosmerné tachogenerátory, tachometrové mostíky atď.
Podľa účelu korekčné zariadenia sú klasifikované:
- STABILIZÁCIA zabezpečuje stabilitu samohybných zbraní a zlepšuje ich statické a dynamické vlastnosti;
- KOMPENZÁCIA znižuje statické a dynamické chyby pri konštrukcii samohybných zbraní pomocou kombinovaného princípu;
- FILTROVANIE zvýšenie odolnosti systémov proti šumu, napríklad filtrovanie vyšších harmonických pri demodulácii signálu priameho kanála;
- ŠPECIALIZOVANÉ dať systému špeciálne vlastnosti, ktoré zlepšujú kvalitu systému.
ACS je možné postaviť podľa nasledujúcich konštrukčných schém:
- So sériovým korekčným obvodom.
Zosilňovač U musí mať vysokú vstupnú impedanciu, aby neobchádzal výstup korekčného obvodu.
Používa sa v prípade pomaly sa meniacich vstupných vplyvov, keďže pri veľkých nesúladoch nastáva saturácia v reálnych nelineárnych prvkoch, medzná frekvencia ide doľava a systém pomaly opúšťa stav saturácie.
Obr.1.
Sekvenčná korekcia sa často používa v stabilizačných systémoch alebo na korekciu slučky s korekčnou spätnou väzbou.
Znižuje sa.

- S antiparalelným korekčným obvodom.

Obr.2.
Do vstupu vstupuje ako rozdiel a nedochádza k hlbokej saturácii.
- So sériovo-paralelným korekčným obvodom.

Obr.3.
- S kombinovanými korekčnými reťazami.
Syntéza ACS podriadeného riadenia s dvoma alebo viacerými obvodmi sa vykonáva sekvenčnou optimalizáciou obvodov, počnúc vnútorným.
Výpočet systémov je rozdelený do 2 etáp: statické a dynamické.
Statický výpočetspočíva vo výbere hlavných prepojení systému zahrnutých v jeho hlavnom okruhu, zostavení jeho blokovej schémy a určení parametrov hlavných prvkov systému (faktory zisku, ktoré zabezpečujú požadovanú presnosť, časové konštanty všetkých prvkov, prevodový stupeň prevodové pomery, prenosové funkcie jednotlivých článkov, výkon motora). Okrem toho to zahŕňa výpočet a návrh magnetických a polovodičových zosilňovačov a výber tranzistorových alebo tyristorových meničov, motorov, citlivých prvkov a iných pomocných zariadení systémov, ako aj výpočet presnosti v ustálenom stave a citlivosti systému.
Dynamický výpočetzahŕňa veľký súbor problémov súvisiacich so stabilitou a kvalitou prechodného procesu (rýchlosť, výkonové charakteristiky a dynamická presnosť systému). Počas procesu výpočtu sa vyberajú korekčné obvody, miesta, kde sú pripojené, a určujú sa ich parametre. Vypočítava sa aj prechodová krivka alebo sa modeluje systém, aby sa objasnili získané ukazovatele kvality a zohľadnili sa niektoré nelinearity.
Platformy, na ktorých sú postavené stabilizačné algoritmy:
- Klasické (diferenciálne rovnice - časové a frekvenčné metódy);
- Fuzzy logika;
- Neurálne siete;
- Genetické a mravčie algoritmy.
Metódy syntézy regulátorov:
- Klasická schéma;
- PID regulátory;
- Spôsob umiestnenia pólov;
- metóda LCH;
- Kombinované ovládanie;
- Mnoho stabilizačných regulátorov.
Klasická syntéza regulátora
Klasická bloková schéma riadenia objektu je na obr. 1. Zvyčajne sa regulátor zapína pred objektom.

Ryža. 1. Klasická bloková schéma riadenia objektov
Úlohou riadiaceho systému je potlačiť pôsobenie vonkajších porúch a zabezpečiť kvalitné prechodné procesy. Tieto ciele sú často protichodné. V skutočnosti potrebujeme stabilizovať systém tak, aby mal požadované prenosové funkcie pre hlavnú akciu a poruchový kanál:
, .
Na to môžeme použiť iba jeden ovládač, preto sa takýto systém nazýva systém s jedným stupňom voľnosti.
Tieto dve prenosové funkcie sú spojené rovnosťou
Preto zmenou jednej z prenosových funkcií automaticky zmeníme aj druhú. Nedajú sa teda vytvárať samostatne a riešením bude vždy nejaký kompromis.
Pozrime sa, či takýto systém dokáže poskytnúť nulovú chybu, teda absolútne presné sledovanie vstupného signálu. Prenosová funkcia chybou sa rovná
Urobiť chybu Vždy bola nula, vyžaduje sa, aby sa táto prenosová funkcia rovnala nule. Keďže jeho čitateľ nie je nula, hneď vidíme, že menovateľ musí ísť do nekonečna. Môžeme ovplyvniť iba regulátor, takže dostaneme. tedana zníženie chyby, ktorú potrebujete
zvýšiť zisk regulátora.
Zisk však nemožno zvyšovať donekonečna. Po prvé, všetky skutočné zariadenia majú maximálne prípustné hodnoty pre vstupné a výstupné signály. Po druhé, s veľkým zosilnením obvodu sa zhoršuje kvalita prechodných procesov, zvyšuje sa vplyv porúch a hluku a systém môže stratiť stabilitu. Preto v obvode s jedným stupňom voľnosti nie je možné zabezpečiť nulovú chybu sledovania.
Pozrime sa na problém z pohľadu frekvenčných charakteristík. Na jednej strane je pre kvalitné sledovanie hlavného signálu žiaduce, aby frekvenčná odozva bola približne rovná 1 (v tomto prípade). Na druhej strane z hľadiska robustnej stability je potrebné zabezpečiť pri vysokých frekvenciách, kde je chyba modelovania veľká. Navyše, prenosová funkcia pre poruchy by mala byť taká, aby tieto poruchy boli potlačené, čo by sme mali v ideálnom prípade zabezpečiť.
Pri výbere kompromisného riešenia zvyčajne robíte nasledovné:
● pri nízkej frekvencií, podmienka je splnená, čo zabezpečuje dobré sledovanie nízkofrekvenčných signálov; v tomto prípade sú potlačené nízkofrekvenčné poruchy;
● pri vysokej frekvencie sa hľadajú na zabezpečenie robustnej stability a potlačenia šumu merania; v tomto prípade, to znamená, že systém skutočne funguje ako otvorený okruh, regulátor nereaguje na vysokofrekvenčné rušenie.
Výpočet lineárnych spojitých automatických riadiacich systémov pre danú presnosť
V ustálenom stave
Jednou z hlavných požiadaviek, ktoré musí ACS spĺňať, je zabezpečiť potrebnú presnosť reprodukcie hlavného (riadiaceho) signálu v ustálenom stave.
Poradie astatizmu a koeficient prenosu systému sa zistí na základe požiadaviek na presnosť v ustálenom stave.Ak sa koeficient prenosu systému, určený požadovanou hodnotou statizmu a faktora kvality (v prípade astatického systému automatického riadenia), ukáže byť taký veľký, že výrazne komplikuje aj jednoduchú stabilizáciu systému, je vhodné zvýšiť rád astatizmu a tým znížiť danú chybu ustáleného stavu na nulu, bez ohľadu na hodnotu koeficientu prenosu systému . V dôsledku toho je možné zvoliť hodnotu tohto koeficientu len na základe úvah o stabilite a kvalite prechodných procesov.
Nech je štrukturálny diagram ACS zredukovaný na formu

Potom v kvázi ustálenom prevádzkovom režime automatického riadiaceho systému môže byť nesúlad reprezentovaný vo forme konvergentného radu
kde pôsobia ako hmotnostné konštanty.
Je zrejmé, že takýto proces sa môže uskutočniť iba vtedy, ak sa funkcia pomaly mení a je pomerne hladká.
Ak si predstavíme prenosovú funkciu systému s otvorenou slučkou vo forme
potom pri r = 0
pri r = 1
pri r = 2
pri r = 3
Nízkofrekvenčná časť logaritmickej amplitúdovej frekvenčnej charakteristiky určuje presnosť systému pri spracovaní pomaly sa meniacich riadiacich signálov v ustálenom stave a je určená chybovosťou. Chybovosť už nemá významný vplyv na presnosť ACS a pri praktických výpočtoch ich možno ignorovať.
1. Výpočet ustáleného prevádzkového režimu ACS na základe špecifikovaných koeficientov nesúladu (chyby)
Presnosť sústavy v ustálenom stave je určená hodnotou koeficientu prenosu sústavy s otvorenou slučkou, ktorá sa určuje v závislosti od formy špecifikácie požiadaviek na presnosť sústavy.
Výpočet sa vykonáva nasledovne.
- STATICKÁ SAR. Tu nastavíte hodnotu koeficientu polohovej chyby, ktorá sa používa na určenie: .
dB
20 lgk ks
ω, s-1
- ASTATICKÉ SYSTÉMY 1. rádu.
V tomto prípade je určený koeficient, ktorým sa určuje
Ak sú uvedené koeficienty a, potom, čo určuje polohu nízkofrekvenčnej asymptoty LFC systému s otvorenou slučkou so strmosťou -20 dB/dec, a druhá asymptota má strmosť -40 dB/ dec pri väzbovej frekvencii (obr. 1).

Obr.1.
- ASTATICKÉ SYSTÉMY 2. rádu.
Pomocou daného koeficientu určíme kpc:
dB
ω, s-1
2. Výpočet ustáleného prevádzkového režimu ACS na základe špecifikovanej maximálnej hodnoty nesúladu (chyby) systému
Na základe prípustnej hodnoty ustálenej chyby a typu regulačnej akcie sa vyberú parametre nízkofrekvenčnej časti LFC systému.
- Nech je uvedená prípustná maximálna chyba pri harmonickom ovplyvnení s amplitúdou a frekvenciou a poradie astatizmu systému.
Potom nízkofrekvenčná asymptota LFC systému nesmie prejsť nižšie ako kontrolný bod so súradnicami:
(1)
a majú sklon -20 r dB/dec. Závislosť (1) je platná, keď.
- Nech je uvedená prípustná maximálna chyba pri maximálnej rýchlosti a maximálne zrýchlenie vstupného vplyvu a poradie astatizmu r systémy.
Často je vhodné použiť metódu ekvivalentného sínusového pôsobenia navrhnutú Ya.E. Gukaylo.
V tomto prípade sa určí režim, v ktorom sa amplitúdy rýchlosti a zrýchlenia rovnajú maximálnym špecifikovaným hodnotám. Nech sa vstupný vplyv zmení v súlade s daným zákonom
. (2)
Prirovnaním hodnôt amplitúdy rýchlosti a zrýchlenia získaných diferenciáciou výrazu (2) k daným hodnotám dostaneme
kde, . Pomocou týchto hodnôt môžete vytvoriť ovládací prvok
bod B so súradnicami a
S jedinou negatívnou spätnou väzbou,
S nejednotkovou spätnou väzbou.
Ak je rýchlosť vstupného signálu maximálna a zrýchlenie klesá, potom sa testovací bod bude pohybovať v priamom smere so sklonom -20 dB/dec vo frekvenčnom rozsahu. Ak sa zrýchlenie rovná maximálnej hodnote a rýchlosť klesá, potom sa riadiaci bod pohybuje v priamom smere so sklonom -40 dB/dec vo frekvenčnom rozsahu.
Oblasť nachádzajúca sa pod kontrolným bodom B a dve priame čiary so sklonom -20 dB/dec a -40 dB/dec je zakázanou oblasťou pre LFC sledovacieho systému. Pretože presný LFC prechádza pod priesečníkom dvoch asymptot o 3 dB, požadovaná charakteristika at by mala byť zvýšená o túto hodnotu, t.j.
V tomto prípade je požadovaná hodnota činiteľa kvality pre rýchlosť, a frekvencia v bode priesečníka druhej asymptoty s osou frekvencie (obr. 2).
V prípade, že je riadiaca činnosť charakterizovaná iba maximálnou rýchlosťou, faktor kvality systému z hľadiska rýchlosti pri danej chybovej hodnote:
Ak je špecifikované iba maximálne zrýchlenie signálu a veľkosť chyby, potom faktor kvality zrýchlenia je:

Obr.2.
- Nech je špecifikovaná maximálna statická chyba pozdĺž riadiaceho kanála (vstupná akcia je kroková, systém je statický pozdĺž riadiaceho kanála).

Obr.3.
Potom sa hodnota určí z výrazu. Statická presnosť automatického systému sa dá určiť z rovnice:
kde je statická presnosť systému s uzavretou slučkou,
odchýlka regulovanej veličiny v systéme s otvorenou slučkou,
koeficient prenosu s otvorenou slučkou potrebný na zabezpečenie danej presnosti.
- Nech je špecifikovaná maximálna povolená statická chyba pozdĺž kanála rušenia (porucha je stupňovitá, systém je statický pozdĺž kanála rušenia, obr. 3).
Potom sa hodnota určí z výrazu:
kde je koeficient prenosu systému s otvorenou slučkou pozdĺž kanála rušenia,
kde chyba systému bez regulátora.
V statických riadiacich systémoch je chyba v ustálenom stave spôsobená konštantným rušením znížená o 1+ v porovnaní so systémom s otvorenou slučkou. Súčasne sa koeficient prenosu systému s uzavretou slučkou tiež zníži 1+ krát.
- Nech je daná prípustná chyba otáčok z riadiacej akcie (vstupná akcia sa mení pri konštantnej rýchlosti, systém je astatický prvého rádu).
Servosystémy sú zvyčajne navrhnuté ako astatické systémy prvého rádu. Pracujú pod variabilným riadiacim vstupom. Pre takéto systémy v ustálenom stave je najcharakteristickejšia zmena vstupného efektu lineárna.
Potom sa faktor kvality systému z hľadiska rýchlosti určí z výrazu:
Keďže chyba v ustálenom stave je určená nízkofrekvenčnou časťou LFC, z vypočítanej hodnoty koeficientu prenosu možno zostrojiť nízkofrekvenčnú asymptotu požadovaného LFC.
3. Výpočet ustáleného prevádzkového režimu ACS pre danú maximálnu dovolenú chybu systému s nejednotkovou spätnou väzbou
Nech sú a priori informácie o vstupnom signáli minimalizované:
- Maximálna absolútna hodnota prvej derivácie vstupnej akcie (maximálna rýchlosť sledovania);
- Maximálna absolútna hodnota druhej derivácie vstupnej akcie (maximálne zrýchlenie sledovania) ;
- Vstupom môže byť deterministický alebo náhodný signál s akoukoľvek spektrálnou hustotou.
Je potrebné obmedziť maximálnu dovolenú chybu riadiaceho systému pri reprodukcii užitočného signálu v ustálenom prevádzkovom stave hodnotou.
Požiadavka na presnosť reprodukcie je najjednoduchšie formulovaná pre harmonický vstupný efekt ekvivalentný skutočnému vstupnému signálu:
za predpokladu, že amplitúda a frekvencia sú dané a počiatočná fáza má ľubovoľnú hodnotu.
Stanovme súvislosť medzi povolenou chybou pri reprodukcii vstupného efektu a parametrami systému a vstupného signálu.
Blokovú schému kontinuálneho automatického riadiaceho systému necháme zredukovať do podoby (obr. 4).

Obr.4.
Chyba na výstupe systému v časovej oblasti je určená výrazom:
kde je referenčná (bezchybná) výstupná funkcia.
Dá sa ukázať, že kvôli obmedzeniam rýchlosti a zrýchleniavýstupná funkcia sa líši od krokovej funkcie.
Namapujme posledný výraz do priestoru Laplaceových transformácií:
Pozrime sa na priestor Fourierových transformácií:
V nízkofrekvenčnej oblasti (časové konštanty spätnoväzbového obvodu) potom
maximálna amplitúda chyby je určená výrazom:
V reálnych systémoch pri nízkych frekvenciách je to zvyčajne, pretože požiadavka musí byť splnená; matematický výraz určiťsa prevedie na riadiacej frekvencii () do tvaru
a aby sa výstupná funkcia reprodukovala s maximálnou chybou nie väčšou, ako je špecifikovaná, LFC navrhnutého systému by nemalo prechádzať pod kontrolný bod so súradnicami a
4. Výpočet ustálenej prevádzky statického automatického riadiaceho systému metódou limitných prechodov
Vyhlásenie
Nech je uvedený zovšeobecnený blokový diagram statického ACS:

kde, tu polynómy čitateľov a menovateľov neobsahujú faktor p (ich voľné podmienky sa rovnajú jednej),
prevodný koeficient regulátora,
koeficient prenosu objektu cez riadiaci kanál,
koeficient spätného prenosu,
koeficient prenosu objektu pozdĺž kanála narušenia,
Okrem toho sa v prvej aproximácii predpokladá, že statické a dynamické koeficienty prenosu spojov sú rovnaké, nominálna vstupná akcia zodpovedá nominálnej hodnote výstupnej funkcie pozdĺž riadiaceho kanála a nech je hodnota postupnej rušivej akcie a špecifikuje sa povolená statická chyba pozdĺž kanála rušenia v % nominálnej hodnoty výstupnej funkcie.
Potom sa koeficienty prenosu systému pozdĺž riadiacich a rušivých kanálov v ustálenom stave rovnajú koeficientom statického prenosu uzavretého systému a sú určené vzorcami:
(1)
Statické rovnice pre riadiaci a poruchový kanál majú tvar
(2)
Prenosové koeficienty regulátora a spätnoväzbového obvodu sú určené výrazmi:
(3)
Spôsoby zvýšenia statickej presnosti samohybných zbraní
- Zvýšenie koeficientu prenosu systému s otvorenou slučkou v statike systémov.

Kde, .
Podmienky stability sa však so zvyšovaním hodnoty zhoršujú, teda pribúdajú chyby v dynamike.
- Úvod do integrovaného ovládača komponentov.
2.1. Aplikácia I-regulátora: .
V tomto prípade sa systém stane astatickým pozdĺž riadiacich a rušivých kanálov a statická chyba sa rovná nule. LFC systému bude oveľa strmšie ako pôvodný a fázový posun sa zvýši o 90 stupňov. Systém môže byť nestabilný.
2.2. Inštalácia PI regulátora: .
Tu je statická chyba nulová a podmienky stability sú lepšie ako v prípade systému s I-regulátorom.
2.3. Použitie PID regulátora: .
Statická chyba systému je nulová a podmienky stability sú lepšie ako v systéme s PI regulátorom.
- Zavedenie nejednotkovej spätnej väzby do systému, ak sa vyžaduje presná reprodukcia informačnej úrovne vstupného signálu.
Veríme tomu a sú to statické odkazy. , musíte si vybrať niečo takéto,
Komu; .
- Vstupná mierka
vplyv.
Tu.
Výstupná funkcia sa bude rovnať informačnej úrovni vstupného vplyvu, ak teda kde.
- Aplikácia princípu kompenzácie cez riadiace a poruchové kanály.
Výpočet kompenzačných zariadení je popísaný v časti „Výpočet kombinovaných riadiacich systémov“.
Výpočet dynamiky samohybných zbraní
Syntéza ACS pomocou LFC
V súčasnosti sa vyvinulo veľké množstvo metód na syntézu korekčných zariadení, ktoré sa delia na:
- metódy analytickej syntézy, ktoré využívajú analytické výrazy, ktoré spájajú indikátory kvality systému s parametrami korekčných zariadení;
- graficko-analytické.
Najvhodnejšou z graficko-analytických metód syntézy je klasická univerzálna metóda logaritmických frekvenčných charakteristík.
Podstata metódy je nasledujúca. Najprv sa skonštruuje asymptotický LFC pôvodného systému, potom sa skonštruuje požadovaný LFC systému s otvorenou slučkou; LFC korekčného zariadenia musí zmeniť tvar LFC pôvodného systému tak, aby LFC korigovaného systému.
Najťažším a kritickým štádiom syntézy je konštrukcia požadovaného LFC. Pri konštrukcii sa predpokladá, že syntetizovaný systém má jedinú negatívnu spätnú väzbu a je to systém s minimálnou fázou. Kvantitatívny vzťah medzi ukazovateľmi kvality prechodovej funkcie systémov s minimálnou fázou s jedným OOS a LFC systému s otvorenou slučkou je stanovený na základe nomogramov Chestnut-Mayer, V. V. Solodovnikov, A. V. Fateev, V. A. Besekersky.
Požadovaný LFC je konvenčne rozdelený do troch častí: nízkofrekvenčná, stredná frekvencia a vysokofrekvenčná. Nízkofrekvenčná časť je určená statickou presnosťou systému presnosťou prevádzky ACS v ustálenom stave. V statickom systéme je nízkofrekvenčná asymptota rovnobežná s frekvenčnou osou, v astatických systémoch je sklon nízkofrekvenčnej asymptoty 20 * dB/dec, kde - poradie astatizmu ( = 1, 2, 3,...). Stredofrekvenčná časť je najdôležitejšia, pretože určuje hlavne dynamiku procesov v systéme. Hlavnými parametrami stredofrekvenčnej asymptoty sú jej strmosť a medzná frekvencia. Čím väčší je sklon stredofrekvenčnej asymptoty, tým ťažšie je zabezpečiť dobré dynamické vlastnosti systému. Preto je vhodný sklon 20 dB/dec a extrémne zriedkavo presahuje 40 dB/dec. Medzná frekvencia určuje výkon systému. Čím viac, tým vyšší výkon (tým menej). Vysokofrekvenčná časť požadovaného LFC má malý vplyv na dynamické vlastnosti systému. Vo všeobecnosti je lepšie mať čo najväčší sklon jeho asymptoty, čím sa znižuje potrebný výkon aktora a vplyv vysokofrekvenčného rušenia.
Požadovaný LFC je zostavený na základe systémových požiadaviek: požiadavky na statické vlastnosti sú špecifikované vo forme astatistického poriadku a koeficient prenosu systému s otvorenou slučkou; dynamické vlastnosti sú najčastejšie nastavené maximálnou povolenou hodnotou prekmitu a časom regulácie; niekedy je nastavené obmedzenie v podobe maximálneho povoleného zrýchlenia regulovanej veličiny pri počiatočnom nesúlade.
Metódy konštrukcie požadovaného LFC: konštrukcia podľa V.V. Solodovnikova, s použitím štandardných LFC a nomogramov pre ne, konštrukcia podľa E.A. Sankovského G.G. Sigalova, zjednodušená konštrukcia, konštrukcia podľa V.A. Besekerského, podľa metódy A. V. Fateeva a iné metódy.
Výhody frekvenčných metód:
● Frekvenčné charakteristiky, odrážajúce matematický model objektu, je možné získať relatívne jednoducho experimentálne;
● Výpočty založené na frekvenčných charakteristikách sú zredukované na jednoduché a vizuálne graficko-analytické konštrukcie;
● Frekvenčné metódy spájajú jednoduchosť a prehľadnosť pri riešení problémov bez ohľadu na poradie systému, prítomnosť transcendentálnych alebo iracionálnych väzieb v prenosovej funkcii.
Syntéza požadovaného LFC
Teoretické a experimentálne štúdie preukázali, že LFC riadiaceho systému s otvorenou slučkou, stabilného v uzavretom stave, takmer vždy pretína frekvenčnú os s úsekom so sklonom 20 dB/dec. Priesečník frekvenčnej osi úsekom LFC so sklonom 40 dB/dec alebo 60 dB/dec je možný, ale málo používaný, pretože takýto systém je stabilný s veľmi nízkym koeficientom prenosu.
Najracionálnejšia forma LFC systému s otvorenou slučkou, stabilná v uzavretom stave, má sklony:
- nízkofrekvenčná asymptota 0, -20, -40 dB/dec (určená poradím astatizmu systému);
- asymptota spájajúca nízkofrekvenčné a stredofrekvenčné asymptoty môže mať sklon 20, -40, -60 dB/dec;
- stredofrekvenčná asymptota 20 dB/dec;
- asymptota spájajúca strednú frekvenciu s vysokofrekvenčnou časťou LFC má spravidla sklon -40 dB/dec;
- vysokofrekvenčná sekcia LFC je postavená paralelne s asymptotami vysokofrekvenčnej sekcie LFC pôvodného systému s otvorenou slučkou.
Pri konštrukcii požadovaných LFC vychádzame z nasledujúcich požiadaviek:
- Nastavený systém musí spĺňať špecifikované ukazovatele kvality (dovolená chyba v ustálenom stave, požadovaná rezerva stability, výkon, prekmit a iné ukazovatele kvality prechodných procesov).
- Tvar požadovaného LFC by sa mal čo najmenej líšiť od LFC nekorigovaného systému, aby sa zjednodušilo stabilizačné zariadenie.
- Mali by ste sa snažiť zabezpečiť, aby pri vysokých frekvenciách LFC nekorigovaného systému neprekročilo viac ako 20-25 dB.
- Nízkofrekvenčná časť požadovaného LFC sa musí zhodovať s LFC nekorigovaného systému, pretože koeficient prenosu dynamicky nekorigovaného systému s otvorenou slučkou sa volí s prihliadnutím na požadovanú presnosť v ustálenom stave.
Konštrukciu požadovaných LFC možno považovať za dokončenú, ak sú splnené všetky požiadavky na kvalitu systému. V opačnom prípade by ste sa mali vrátiť k výpočtu ustáleného stavu prevádzky a zmeniť parametre prvkov hlavného obvodu (vybrať motor s iným výkonom alebo menej zotrvačným, použiť zosilňovač s menšou časovou konštantou, povoliť striktnú negatívnu spätnú väzbu pokrývajúci najviac zotrvačné prvky sústavy atď.) .
Algoritmus na konštrukciu požadovaných LFC

- Výber medznej frekvencie Lf(w).
Ak je špecifikovaný čas prekmitu a rozpadu prechodného procesu, potom sa použijú nomogramy V. V. Solodovnikova alebo A. V. Fateeva; ak je uvedený oscilačný index M, potom sa výpočet vykoná podľa metódy V.A. Besekersky.
Konštrukcia kvalitných nomogramov V.V.Solodovnikova vychádzala z typickej reálnej frekvenčnej odozvy automatického riadiaceho systému s uzavretou slučkou (obr. 2). Pre statické systémy ( =0), pre astatické systémy ( =1, 2,…) .
Táto metóda predpokladá zachovanie pomeru.
Ako východiskové boli brané dynamické ukazovatele kvality a, ktoré súvisia s parametrami reálnej frekvenčnej odozvy uzavretého ACS diagramom kvality V.V. Solodovnikov (obr. 3). Na základe danej krivky (obr. 3) sa určí zodpovedajúca hodnota. Potom sa pomocou krivky určí hodnota, ktorá sa rovná zadanej hodnote, získame kde je hodnota medznej frekvencie, pri ktorej čas riadenia nepresiahne zadanú hodnotu.
Na druhej strane je limitovaný prípustným zrýchlením riadenej súradnice. Odporúča sa v prípade počiatočného nesúladu.
Čas regulácie možno približne určiť pomocou empirického vzorca, kde koeficient čitateľa sa berie ako rovný 2 at, 3 at, 4 at.
Vždy je žiaduce navrhnúť systém s čo najvyšším výkonom.
Spravidla nepresahuje viac ako ½ dekády. Je to spôsobené komplikovanosťou korekčných zariadení, potrebou zavedenia diferenciačných väzieb do systému, čo znižuje spoľahlivosť a odolnosť voči šumu a tiež obmedzeniami maximálneho povoleného zrýchlenia riadenej súradnice.
Medznú frekvenciu možno zvýšiť iba jej zvýšením. V tomto prípade sa statická presnosť zvyšuje, ale podmienky stability sa zhoršujú.
Rozhodnutie o výbere musí mať dostatočné odôvodnenie.
- Zostrojenie asymptoty so strednou frekvenciou.
- Stredofrekvenčnú asymptotu spárujeme s nízkofrekvenčnou asymptotoutak, že vo frekvenčnom rozsahu, v ktorom je prebytok fázy. Nadbytočná fáza a nadbytočný modul sa určujú pomocou nomogramu (obr. 4). Konjugovaná asymptota má sklon 20, -40 alebo 60 dB/dec at =0 ( - poradie astatizmu systému); -40, -60 dB/dec at =1 a -60 dB/dec pri =2.
Ak sa ukáže, že prebytok fázy je menší, potom by sa asymptota konjugátu mala posunúť doľava alebo by sa mala znížiť jej strmosť. Ak je fázový prebytok väčší ako je prípustný, potom sa konjugačná asymptota posunie doprava alebo sa zvýši jej sklon.
Počiatočná väzbová frekvencia je určená z výrazu.
- Stredofrekvenčnú asymptotu spárujeme s vysokofrekvenčnou časťoutak, že vo frekvenčnom rozsahu, kde je prebytok fázy. Spojovacia frekvencia je určená pomerom.
Ak na spojovacej frekvencii<, то сопрягающую асимптоту смещают вправо или уменьшают ее наклон.
Ak >, potom sa konjugačná asymptota posunie doľava alebo sa zväčší jej sklon. Odporúčaný rozdiel by mal byť niekoľko stupňov. Pravá konjugovaná frekvencia konjugovanej asymptoty.
Typicky je sklon tejto asymptoty -40 dB/dec a prijateľný rozdiel je. Test sa vykonáva s frekvenciou, pri ktorej.
- Vysokofrekvenčná časť je navrhnutá paralelne alebo s ňou kombinovaná.
Táto časť charakteristiky ovplyvňuje hladký chod systému.
Takže v prvej fáze konštrukcie sa z podmienok nájdu frekvencie, pri ktorých je stredofrekvenčná asymptota konjugovaná s konjugačnými asymptotami. V druhej fáze sú hodnoty konjugovaných frekvencií špecifikované s prihliadnutím na fázové prebytky. V tretej fáze sa všetky párovacie frekvencie upravia podľa stavu ich blízkosti k párovacej frekvencii pôvodného systému, t.j. ak sa tieto frekvencie navzájom výrazne nelíšia.
Syntéza sekvenčného typu korekčného obvodu
V diagrame na obr. 1 je možné získať parametre korekčného obvodu tu:
Prejdime k logaritmickým frekvenčným charakteristikám: ,
Pri vysokých frekvenciách by LFC regulátora „štandardne“ nemalo presiahnuť 20 dB podľa podmienok ochrany pred hlukom. Základný princíp štrukturálno-parametrickej optimalizácie automatických riadiacich systémov so spätnou väzbou: regulátor musí obsahovať dynamické prepojenie s prenosovou funkciou rovnou alebo blízkou inverznej prenosovej funkcii riadiaceho objektu.
Pozrime sa na príklad výpočtu sekvenčného korekčného obvodu.
Predpokladajme, že je potrebné upraviť statický systém. Predpokladajme, že sme ich postavili aj my. Domnievame sa, že systém má minimálne fázové väzby, preto nevybudujeme fázovo-frekvenčnú charakteristiku (obr. 2).
Teraz je ľahké reprodukovať parametre korekčného obvodu. Najčastejšie používané korekčné zariadenia sú aktívne a pasívne. R.C. - reťaze. Na základe fyzikálnych konceptov zostavujeme obvod znázornený na obr. 3.
Tlmenie signálu pomocou deliča R 1- R 2 pri vysokých frekvenciách zodpovedá útlmu signálu * o.
Kde,
Pri vysokých frekvenciách nedochádza k žiadnemu kladnému skresleniu. Pomocou korekčného obvodu vieme posunúť medznú frekvenciu doľava a zabezpečiť tak požadovanú stabilitu a kvalitu chodu systému.
Výhody sekvenčného CG:
- Jednoduchosť korekčného zariadenia (v mnohých prípadoch realizovaného vo forme jednoduchého pasívneho RC obvody);
- Jednoduché zapnutie.
nedostatky:
- Účinok sekvenčnej korekcie sa počas prevádzky pri zmene parametrov (koeficienty zosilnenia, časové konštanty) znižuje, preto sa pri sekvenčnej korekcii kladú zvýšené nároky na stabilitu parametrov prvkov, ktorá sa dosahuje použitím drahších prvkov;
- Postupovanie diferenciačnej fázy R.C. -obvody (algoritmy v mikrokontroléroch) sú citlivé na vysokofrekvenčné rušenie;
- Sekvenčná integrácia R.C. -obvody obsahujú objemnejšie kondenzátory (vyžaduje sa implementácia veľkých časových konštánt) ako obvody v spätnoväzbovom obvode.
Zvyčajne sa používa v systémoch s nízkou spotrebou energie. To je vysvetlené na jednej strane jednoduchosťou sekvenčných korekčných zariadení a na druhej strane nevhodnosťou použitia v týchto systémoch objemných paralelných korekčných zariadení úmerných veľkosti akčného člena, ako je tachogenerátor.
Treba mať na pamäti, že kvôli saturácii zosilňovačov nie je vždy vhodné vytvárať požadovaný LFC v nízko a strednom frekvenčnom rozsahu postupným začleňovaním integračných a integračných obvodov alebo niektorých iných prvkov s podobnými charakteristikami do systému. Preto sa spätná väzba často používa na tvarovanie v nízkom a strednom frekvenčnom rozsahu.
Syntéza nadväzujúcich korekčných obvodov
Pri výbere miesta na pripojenie korekčného obvodu by ste sa mali riadiť nasledujúcimi pravidlami:
- Mali by byť pokryté tie prepojenia, ktoré výrazne negatívne ovplyvňujú typ požadovaného LFC.
- Sklon LFC väzieb nepokrytých spätnou väzbou je zvolený tak, aby bol blízky sklonu v strednom frekvenčnom rozsahu. Splnenie tejto podmienky umožňuje mať jednoduchý korekčný obvod.
- Opravná spätná väzba by mala pokrývať čo najviac odkazov s nelineárnymi charakteristikami. V limite je potrebné usilovať sa o to, aby medzi väzbami nepokrytými spätnou väzbou neboli prvky s nelineárnymi charakteristikami. Toto zahrnutie spätnej väzby môže výrazne znížiť vplyv nelinearity charakteristík prvkov pokrytých spätnou väzbou na fungovanie systému.
- Spätná väzba by sa mala týkať článkov s veľkým prevodovým pomerom. Iba v tomto prípade bude spätná väzba účinná.
- Signál na vstup spätnej väzby je potrebné odoberať z prvku s dostatočným výkonom, aby ho zapnutie spätnej väzby nezaťažovalo. Signál zo spätnoväzbového výstupu by mal byť spravidla privedený na vstup prvkov systému, ktoré majú vysoký vstupný odpor.
- Pri výbere miesta zapínania spätnej väzby vo vnútri slučky s korekčnou spätnou väzbou je žiaduce, aby strmosť LFC vo frekvenčnom rozsahu bola 0 alebo 20 dB/dec. Splnenie tejto podmienky umožňuje mať jednoduchý korekčný obvod.
Často pokrývajú zosilňovaciu dráhu systému alebo pokrývajú výkonovú časť systému. Opravná spätná väzba sa zvyčajne používa vo výkonných systémoch.
Výhody CEP:
- Závislosť ukazovateľov kvality systému od zmien parametrov prvkov nemennej časti systému je znížená, pretože vo významnom frekvenčnom rozsahu je prenosová funkcia časti systému pokrytej spätnou väzbou určená prevrátenou hodnotou prenosová funkcia korekčného zariadenia back-to-back. Preto sú požiadavky na prvky pôvodného systému menej prísne ako na sekvenčnú korekciu.
- Nelineárne charakteristiky prvkov pokrytých spätnou väzbou sú linearizované, pretože prenosové vlastnosti pokrytej časti systému sú určené parametrami slučky v obvode spätnej väzby.
- Napájanie korekčných zariadení back-to-back, aj keď vyžaduje vysoký výkon, nespôsobuje ťažkosti, pretože spätná väzba zvyčajne začína od koncových spojení systému s výkonným výstupom.
- Korekčné zariadenia back-to-back pracujú s nižšou úrovňou rušenia ako sériové, pretože signál, ktorý do nich vstupuje, prechádza celým systémom, čo je dolnopriepustný filter. V dôsledku toho sa účinnosť korekčných zariadení typu back-to-back, keď sa na chybový signál aplikuje rušenie, znižuje menej ako účinnosť sériových korekčných zariadení.
- Na rozdiel od sekvenčného korekčného zariadenia spätná väzba umožňuje realizovať najväčšiu časovú konštantu požadovaného LFC s relatívne malými hodnotami vlastných časových konštánt.
nedostatky:
- CP nad sebou často obsahujú drahé alebo objemné prvky (napríklad tachogenerátory, diferenciačné transformátory).
- Sčítanie spätnoväzbového signálu a chybového signálu by malo byť implementované tak, aby spätná väzba neposunula vstup zosilňovača.
- Slučka vytvorená korekčnou spätnou väzbou môže byť nestabilná. Zníženie hraníc stability vo vnútorných obvodoch zhoršuje spoľahlivosť systému ako celku.
Metódy stanovenia:
- analytické;
- Graficko-analytické;
- Modelovo-experimentálne.
Po výpočte antiparalelného korekčného obvodu by sa mala skontrolovať stabilita vnútorného obvodu. Ak je hlavná spätná väzba otvorená a vnútorný obvod je nestabilný, prvky systému môžu zlyhať. Ak je vnútorný obvod nestabilný, jeho stabilita je zabezpečená sériovým korekčným obvodom.
Približná metóda na zostavenie LFC korekčnej negatívnej spätnej väzby
Nechajte blokovú schému projektovaného
Systém je zredukovaný do zobrazenej podoby
Na obr.
opravná spätná väzba;
prenos
funkcia open-loop source (neopravená)
systémov.
Pre takýto štrukturálny diagram je prenosová funkcia upraveného systému s otvorenou slučkou.
Vo frekvenčnom rozsahu, kderovnica bude napísaná takto
Tie.
Podmienka výberu; (1)
- výberová rovnica (v rozsahu nízkych a vysokých frekvencií) (2)
Vo frekvenčnom rozsahu, kde
Podmienka výberu; (3)
dostaneme,
t.j.
kde - výberová rovnica(v strednom frekvenčnom rozsahu). (4)
Potom je algoritmus konštrukcie nasledujúci:
- staviame.
- staviame.
- Zostrojíme a určíme frekvenčný rozsah, kde je táto charakteristika väčšia ako nula (podmienka výberu (3)).
- Na základe konkrétnej technickej realizácie systému sa určí, t.j. miesta vstupu a výstupu korekčnej spätnej väzby.
- staviame.
- Vo vybranom frekvenčnom rozsahu skonštruujeme logaritmickú frekvenčnú odozvu korekčného spoja odpočítaním od výberovej rovnice (4).
- V nízkofrekvenčnej oblasti, kde (podmienka výberu (1)) volíme tak, aby bola splnená výberová rovnica (2): .
- Vo vysokofrekvenčnej oblasti sa nerovnosť (2) zvyčajne uspokojí s asymptotným sklonom 0 dB/dec.
- Sklon a dĺžka konjugačných asymptot sa volí na základe jednoduchosti implementácie obvodu korekčného zariadenia.
- Na základe LFC určíme a navrhneme schematický diagram korekčného prepojenia.
Príklad. Nechať a byť daný. Odkazy, na ktoré sa vzťahuje spätná väzba, sú určené. Treba postaviť. Konštrukcia je vyhotovená na obr.2. Počiatočný systém je minimálna fáza. Po konštrukcii je potrebné skontrolovať stabilitu vypočítaného obrysu.
Presná metóda na zostavenie LFC korekčného spätnoväzbového prepojenia
Ak je potrebné prísne dodržiavať špecifikované ukazovatele kvality, potom je potrebné vypočítať presné hodnoty frekvenčných charakteristík korekčného obvodu.
Počiatočná bloková schéma nekorigovaných samohybných zbraní
Konvertovaný blokový diagram
Upravený blokový diagram ekvivalentu ACS

Uveďme nasledujúcu notáciu: , (1)
Potom.
To vám umožňuje používať uzatváracie nomogramy a nájsť i.
Predpokladajme, že sú známe. Uzáverový nomogram používame v opačnom poradí:
, => , .
Potom z výrazu
LFC antiparalelného korekčného obvodu:
Pre výber parametrov korekčného obvodu je potrebné reprezentovať LFC v asymptotickej forme.
Konštrukcia LFC priameho paralelného korekčného spojenia
Blokovú schému navrhnutého systému transformujme do podoby obr.
V tomto prípade je vhodné zvážiť prenosovú funkciu.
Frekvenčné charakteristiky a sú určené podobne ako frekvenčné charakteristiky sériového korekčného obvodu.
Vo frekvenčnom rozsahu, kde, charakteristiky
tie. korekčný obvod neovplyvňuje činnosť systému, ale vo frekvenčnom rozsahu, kde sú charakteristiky
a správanie systému je určené parametrami priameho paralelného obvodu.
Vo frekvenčnom rozsahu, kde je pri určovaní LFC vhodné uvádzať paralelne zapojené spoje v tvare, kde, .
Zostavíme LFC sekvenčného korekčného zariadenia ako predtým. Pomocou uzatváracieho nomogramu nájdeme a a nakoniec .
Návrh korekčného zariadenia
Kritériá kvality UK:
- Spoľahlivosť;
- Nízke náklady;
- Jednoduchosť implementácie okruhu;
- udržateľnosť;
- Imunita proti hluku;
- Nízka spotreba energie;
- Jednoduchosť výroby a prevádzky.
Obmedzenia:
- Do jednej korekčnej sekcie sa neodporúča inštalovať kondenzátory alebo odpory, ktorých hodnoty sa líšia o dva až tri rády.
- LFC korekčných spojov môže mať frekvenčné rozšírenie nie viac ako 2-3 desaťročia a amplitúdový útlm nie viac ako 20-30 dB.
- Koeficient prenosu pasívnej dvojportovej siete by nemal byť navrhnutý menší ako 0,05-0,1.
- Hodnoty rezistorov v aktívnych korekčných odkazoch:
a) v obvode spätnej väzby nie viac ako 1-1,5 MOhm a nie menej ako desiatky kOhm;
b) v priamom kanálovom obvode od desiatok kOhm do 1 MOhm.
- Hodnoty kondenzátorov: jednotky mikrofaradov stovky pcFaradov.
Typy opravných odkazov
- Pasívne štvorpóly ( R - L - C reťazce).
Ak, potom vplyv zaťaženia na informačné procesy možno zanedbať. .
Výstupný signál v týchto obvodoch je slabší (alebo má rovnakú úroveň) ako vstupný.
Príklad. Pasívny integro-diferenciačný článok.
Kde.
Prevaha diferenciačného účinku je zabezpečená, ak veľkosť útlmu k<0.5 или иначе.
Pretože odpor je najväčší, je vhodné začať s výpočtom prvkov korekčného obvodu s danou podmienkou.

Označme odkiaľ;
definujme medziparameter =>
teda k = D.
Vstupná impedancia medziobvodu,
na striedavý prúd
Pri vyrovnávaní odporu je dostatočnou podmienkou pre jednosmerný prúd splnenie vzťahu,
na striedavý prúd.
- Aktívne štvorpóly.
Ak zisk zosilňovača >>1.
Príklad . Aktívny skutočný rozlišovací článok prvého rádu.
Navyše, .
sa vyberie počas nastavovania (nastavenie zosilňovača na nulu).
na striedavý prúd a na jednosmerný prúd je vstupný odpor rovnaký.
Výstupný odpor operačných zosilňovačov je v desiatkach ohmov a je určený hlavne hodnotami odporov v kolektorových obvodoch výstupných tranzistorov.
Obvod neposkytuje predstih v celom frekvenčnom rozsahu, ale iba v určitom pásme blízko medznej frekvencie systému, zvyčajne umiestneného v nízkom a strednom frekvenčnom rozsahu pôvodného ACS. Ideálny spoj silne zdôrazňuje vysoké frekvencie, v oblasti ktorých sa nachádza spektrum rušenia superponované na užitočný signál, pričom reálny obvod ich prenáša bez výrazného zosilnenia.
- Diferenciačný transformátor.

Odpor obvodu primárneho vinutia transformátora.
transformačný pomer transformátora.
Prenosová funkcia stabilizačného transformátora pri
vyzerá ako
Kde, indukčnosť transformátora v režime nečinnosti; .
- Pasívne štvorpólové striedavé obvody.
V obvodoch striedavého prúdu je možné použiť obvody korekcie jednosmerného prúdu.
Schéma zapojenia na pripojenie korekčných obvodov je nasledovná:
Koordinácia elementárnych korekčných väzieb
Vyrobené:
- Pre záťaže aktívnych spojov (zaťažovacie prúdy zosilňovačov by nemali prekročiť maximálne prípustné hodnoty);
- Podľa odporu, výstupný vstup (pri jednosmernom prúde a hornej frekvencii prevádzkového rozsahu systému).
Hodnoty zaťaženia operačných zosilňovačov sú uvedené v technických podmienkach ich použitia a sú zvyčajne vyššie ako 1 kOhm.

Poznámka. Podpísať<< означает меньше как минимум в 10 раз.
Požiadavky na operačné zosilňovače:
- Napäťový zisk.
- Malý posun nuly.
- Vysoká vstupná impedancia (100 kOhm 3 MOhm).
- Nízky výstupný odpor (desiatky ohmov).
- Frekvenčný rozsah prevádzky (šírka pásma).
- Napájacie napätie +5V, ale nie menej ako 10V.
- Dizajn (počet zosilňovačov v jednom kryte).
Typické regulátory
Typy regulátorov:
- P-regulátor (grécky. statos stojace; statický regulátor tvorí proporcionálny regulačný zákon);
So zvyšujúcou sa k p Chyba ustáleného stavu sa zmenšuje, ale zvyšuje sa hluk merania, čo vedie k zvýšeniu aktivity akčných členov (pracujú trhavo), opotrebováva sa mechanická časť a výrazne sa znižuje životnosť zariadenia.
nedostatky:
● nevyhnutná odchýlka regulovanej veličiny od špecifikovanej hodnoty, ak je objekt statický;
● pomalá odozva regulátora na poruchy na začiatku procesu prechodu.
- I-regulátor (integrálny);
- PD regulátor (proporcionálne odvodený);
- PI regulátor (proporcionálno-integrálny);
- PID regulátor (proporcionálne-integrálne-derivátny);
- Regulátor relé.
V spätnej väzbe sa používa regulátor typu D, ale DI regulátor sa nepoužíva.
Tieto regulátory v mnohých prípadoch môžu poskytnúťprijateľné riadenie, jednoduché nastavenie a lacné v hromadnej výrobe.
PD regulátor
Štrukturálna schéma:

vynútenie odkazu.
reálna prenosová funkcia PD regulátora.
regulačného zákona.

(1) bez regulátora;
(2) P-regulátor;
(3) PD regulátor.
Výhody PD regulátora:
- Zvyšuje sa miera stability;
- Kvalita sa výrazne zlepšuje
regulácia (klesá oscilácia
A čas prechodu
proces).
Nevýhody PD regulátora:
- Nízka presnosť ovládania (statická prevádzka
pôvodný systém sa nemení kedy kp = 1);
- Rušenie pri vysokých frekvenciách sa zvyšuje a
prevádzka systému je narušená v dôsledku saturácie
zosilňovače;
- V praxi ťažko realizovateľné.
Implementácia PD regulátora
Vstupné a spätnoväzbové signály sú jednoducho sčítané.
Ak zmeníte znamienka vplyvu vstupu a spätnej väzby, potom by mal byť k výstupu regulátora pripojený menič.
Zenerove diódy v spätnej väzbe operačného zosilňovača sú navrhnuté tak, aby obmedzili úroveň výstupného signálu na špecifikovanú hodnotu.
Vo vstupných obvodoch a sú zapnuté podľa potreby. Odporúča sa to. Ak je to vylúčené, zosilňovač môže prejsť do režimu saturácie v dôsledku rušenia. Voliteľné (hodnota do 20 kOhm).
Prenos funkcie regulátora cez riadiaci kanál:
PI regulátor
(Grécky isos hladký, dromos beh; izodromický regulátor)


Pri nízkych frekvenciách prevláda integračný efekt (nedochádza k žiadnej statickej chybe) a pri vysokých frekvenciách efekt od (kvalita prechodového procesu je lepšia ako pri I-zákone regulácie).
regulačného zákona.
- nedostatok regulátora;
- P-regulátor;
- PI regulátor.
Výhody:
- jednoduchosť implementácie;
- Výrazne zlepšuje presnosť ovládania v statických podmienkach:
Chyba v ustálenom stave s konštantnou vstupnou akciou je nula;
Táto chyba nie je citlivá na zmeny parametrov objektu.
Nedostatky : astatizmus systému sa zvyšuje o jednu a v dôsledku toho sa rezervy stability znižujú, oscilácia procesu prechodu sa zvyšuje a zvyšuje.
Implementácia PI regulátora
PID regulátor
Pri nízkych frekvenciách prevláda integračný efekt a pri vysokých frekvenciách prevláda diferenciačný efekt.
regulačného zákona.
Pri inštalácii PID regulátora sa statický systém stáva astatickým (statická chyba je nula), avšak v dynamike sa astatizmus vplyvom diferenciačnej zložky odstraňuje, t.j. zlepšuje sa kvalita prechodového procesu.
Výhody:
- Vysoká statická presnosť;
- Vysoký výkon;
- Veľká rezerva stability.
nedostatky:
- Aplikovateľné na opísané systémy
diferenciálne rovnice nízkych
poriadku, keď má predmet jeden alebo dva póly
alebo sa dá aproximovať pomocou druhého modelu
objednať.
- Požiadavky na kvalitu manažmentu sú priemerné.
Implementácia PID regulátora

kde, a.
Určujeme podľa LFC operačného zosilňovača. Potom má prenosová funkcia skutočného regulátora tvar:
Systémy najčastejšie využívajú PID regulátor.
- Pre objekty s oneskorením, ktorých inerciálna časť je blízko spojnice prvého rádu, je vhodné použiť PI regulátor;
- Pre objekty s oneskorením, ktorých inerciálna časť je v poriadku, je najlepším regulátorom PID regulátor;
- PID regulátory sú účinné z hľadiska zníženia chyby v ustálenom stave a zlepšenia typu prechodovej odozvy, keď má riadiaci objekt jeden alebo dva póly (alebo sa dá aproximovať modelom druhého rádu);
- Keď je riadiaci proces vysoko dynamický, ako napríklad v systéme riadenia prietoku alebo tlaku, nepoužíva sa diferenciačný komponent, aby sa predišlo javu samobudenia.
Výpočet kombinovaných riadiacich systémov
Kombinovanétaké riadenie v automatickom systéme, keď sa spolu s uzavretou regulačnou slučkou pre odchýlku používa externé kompenzačné zariadenie pre referenčné alebo rušivé vplyvy.
Princíp invariantnostiprincíp kompenzácie dynamických a statických chýb bez ohľadu na formu vstupnej akcie cez riadiaci kanál alebo kompenzáciu rušivého vplyvu.
invariantný vzhľadom na
rušivý vplyv, ak po dokončení procesu prechodu,
určené počiatočnými podmienkami, riadená veličina a systémová chyba nie sú
závisieť od tohto vplyvu.
Automatický riadiaci systém jeinvariantný vzhľadom na
vplyv nastavenia, ak sa po ukončení procesu prechodu určí
počiatočných podmienok, systémová chyba nezávisí od tohto vplyvu.
- Výpočet kompenzačných zariadení pozdĺž kanála rušenia
Nechajte blokovú schému pôvodného systému transformovať do zobrazenej podoby
na obr.
Prenesme miesto pôsobenia poruchy na vstup systému (obr. 2).

Napíšeme rovnicu pre výstupnú súradnicu: .
Vplyv poruchy na výstupnú funkciu f bude chýbať, ak bude splnená podmienkaabsolútna nemennosťsystémy na rušivý vplyv:
Podmienka pre úplnú kompenzáciu rušenia.
Externé ovládače sa používajú na získanie invariantnosti cez kanál rušenia s presnosťou , keďže poradie menovateľa je zvyčajne vyššie ako poradie čitateľa.
Príklad . Nechajte objekt a ovládač správať sa ako aperiodické spojenia. Najväčšia časová konštanta zvyčajne patrí objektu.
Potom
Grafy na obr. 3.
Kompenzačný obvod musí mať diferenciačné vlastnosti a aktívne diferenciačné vlastnosti pri vysokých frekvenciách (pretože charakteristika je čiastočne umiestnená nad osou frekvencie).
Dosiahnutie absolútnej invariantnosti je nemožné, ale kompenzačný efekt môže byť významný aj pri jednoduchom kompenzačnom obvode, ktorý zabezpečuje realizáciu v obmedzenom frekvenčnom rozsahu (na obr. 3).
Meranie porúch je technicky náročné a nie vždy možné, preto sa pri navrhovaní systémov často používajú nepriame metódy merania porúch.
2. Výpočet systémov s kompenzáciou chýb cez riadiaci kanál
Pre tento systém, ktorého bloková schéma je znázornená na obr. 4 platia tieto vzťahy:
prenosová funkcia chybou.
Podmienku úplnej kompenzácie chyby dosiahneme, ak zvolíme kompenzačný obvod s nasledujúcimi parametrami:
(1) podmienka absolútnej nemennosti systému voči chybe pozdĺž riadiaceho kanála.
Servosystémy sú implementované ako astatické. Zoberme si príklad pre takéto systémy (obr. 5).
Pri vysokých frekvenciách vedie diferenciácia druhého rádu v kompenzačnom obvode k saturácii zosilňovačov pri vysokých hladinách hluku. Preto sa vykonáva približná implementácia, ktorá poskytuje hmatateľný regulačný účinok.
Astatické systémy sa vyznačujú koeficientom prenosu faktora kvality k určený pri = 1 a = k.
Ak k =10, potom je chyba 10 %, pretože
Systém nízkej kvality (obr. 6).
Predstavme si kompenzačný obvod s prenosovou funkciou
Ako takýto obvod môže slúžiť tachogenerátor, ak
Vstup je mechanický. Implementácia low-Q systému
Jednoduché.
Získame z podmienky (1).
Potom, keď máme systém s astatizmom 1. rádu, dostaneme systém s
astatizmus druhého rádu (obr. 7).
Vždy Y zaostáva za riadiacim signálom; Zadaním znížime chybu. Kompenzačný obvod neovplyvňuje stabilitu.
Kompenzačný článok musí mať spravidla rozlišovacie vlastnosti a musí byť realizovaný pomocou aktívnych prvkov. Presné splnenie podmienky absolútnej invariantnosti je nemožné z dôvodu technickej nevhodnosti získania derivácie vyššej ako druhého rádu (do regulačnej slučky je vnesená vysoká úroveň rušenia, zvyšuje sa zložitosť kompenzačného zariadenia) a zotrvačnosť reálneho technické zariadenia. Počet aperiodických článkov v kompenzačnom zariadení je navrhnutý tak, aby sa rovnal počtu elementárnych vynucovacích článkov. Časové konštanty aperiodických spojov sú vypočítané na základe prevádzkových podmienok spojov vo významnom frekvenčnom rozsahu, t.j.
Princíp konštrukcie viacokruhového automatického riadiaceho systému s kaskádovým zapojením regulátorov je tzvprincíp podriadenej regulácie.
Syntéza ACS podriadeného riadenia s dvoma alebo viacerými obvodmi sa vykonáva sekvenčnou optimalizáciou obvodov, počnúc vnútorným.
∆θ
,
krupobitie
∆L,
dB
W a (p)
W A1 (p)
1/T str
1/T 0
Ďalšie podobné diela, ktoré by vás mohli zaujímať.vshm> |
|||
| 2007. | Dynamický režim automatických riadiacich systémov | 100,64 kB | |
| Dynamický režim samohybných zbraní. Dynamická rovnica Režim ustáleného stavu nie je typický pre samohybné delá. Za hlavný režim činnosti ACS sa teda považuje dynamický režim charakterizovaný výskytom prechodných procesov v ňom. Preto je druhou hlavnou úlohou pri vývoji ACS analýza dynamických prevádzkových režimov ACS. | |||
| 12933. | SYNTÉZA DISKRÉTNYCH SYSTÉMOV RIADENIA | 221,91 kB | |
| Úloha syntetizovať číslicové riadiace zariadenia V prípadoch, keď je uzavretý diskrétny systém zložený z funkčne nevyhnutných prvkov nestabilný alebo jeho kvalitatívne ukazovatele nevyhovujú požadovaným, vzniká problém jeho korekcie alebo problém syntetizácie riadiaceho zariadenia. V súčasnosti je najracionálnejším spôsobom výstavby riadiacich zariadení použitie riadiacich počítačov alebo špecializovaných digitálnych počítačov CV... | |||
| 2741. | SYNTÉZA KONTROLNÝCH SYSTÉMOV SO SPÄTNOU VÄZNOU | 407,23 kB | |
| Nakreslíme prechodové a frekvenčné charakteristiky spojitého a diskrétneho modelu: Obr. Prechodová odozva spojitého systému Obr. Prechodová odozva diskrétneho systému Obr. Frekvenčné charakteristiky spojitého systému Obr. | |||
| 3208. | Základy analýzy a konštrukcie automatických riadiacich systémov | 458,63 kB | |
| Pre daný dynamický objekt samostatne vypracujte, prípadne si preberte z literatúry schému automatického riadiaceho systému fungujúceho na princípe odchýlky. Vyvinúť variant kombinovaného systému, ktorý obsahuje regulačné slučky pre odchýlku a poruchu. | |||
| 5910. | Automatické riadiace systémy s digitálnymi počítačmi | 928,83 kB | |
| Za posledné dve desaťročia sa spoľahlivosť a cena digitálnych počítačov výrazne zlepšila. V tomto smere sa stále viac využívajú v riadiacich systémoch ako regulátory. V čase, ktorý sa rovná kvantizačnej perióde, je počítač schopný vykonať veľké množstvo výpočtov a vygenerovať výstupný signál, ktorý sa potom použije na ovládanie objektu. | |||
| 5106. | Hlavné typy výskumu systémov riadenia: marketingový, sociologický, ekonomický (ich vlastnosti). Hlavné smery zlepšovania systémov riadenia | 178,73 kB | |
| V podmienkach dynamiky modernej výrobnej a spoločenskej štruktúry musí byť manažment v stave neustáleho rozvoja, ktorý dnes nie je možné zabezpečiť bez skúmania ciest a možností tohto rozvoja. | |||
| 14277. | Úvod do systémovej analýzy, syntézy a modelovania | 582,75 kB | |
| Presne povedané, existujú tri vedy, ktoré študujú systémy: systemológia, teória systémov, ktorá študuje teoretické aspekty a využíva teoretické metódy, teória informácie, teória pravdepodobnosti, teória hier atď. Organizácia systému je spojená s prítomnosťou určitých vzťahy príčin a následkov v tomto systéme. Organizácia systému môže mať rôzne formy, napríklad biologická informácia environmentálna ekonomická sociálna čas priestorová a je určená vzťahmi príčin a následkov v hmote a spoločnosti. u... | |||
| 5435. | Zlepšenie automatického riadiaceho systému pre proces zahusťovania kalu | 515,4 kB | |
| Granulát Uralkali sa vyváža najmä do Brazílie, USA a Číny, kde sa následne používa buď na priamu aplikáciu do pôdy, alebo zmiešaný s dusíkatými a fosforečnými hnojivami. | |||
| 20340. | ANALÝZA A SYNTÉZA SYSTÉMU RIADENIA PODNIKU | 338,39 kB | |
| Zdokonaľovanie systému riadenia, ako aj dnešná manažérska prax v moderných podmienkach, poukazuje na akútny problém potreby výskumného prístupu ako k riadeniu podniku, tak k jeho zlepšovaniu a rozvoju. | |||
| 1891. | Syntéza diskrétneho modálneho riadiaceho zákona pomocou metódy L.M. Boychuk | 345,04 kB | |
| Pomocou funkcie W(z) vytvorte popis diskrétneho objektu v stavovom priestore. Skontrolujte, či sú splnené podmienky ovládateľnosti a pozorovateľnosti tohto objektu. | |||
Metóda LFC je jednou z najbežnejších metód syntézy automatického riadenia, pretože konštrukcia LFC sa spravidla môže vykonávať prakticky bez výpočtovej práce. Je obzvlášť vhodné použiť asymptotické „ideálne“ LFC.
Proces syntézy zvyčajne zahŕňa nasledujúce operácie;
1. Konštrukcia LFC nemennej časti systému.
Nemenná časť riadiaceho systému obsahuje riadiaci objekt a akčný člen, ako aj hlavný spätnoväzbový a porovnávací prvok LFC nemennej časti je zostavený podľa prenosovej funkcie otvorenou slučkou nemennej časti systému.
2. Výstavba požadovanej časti LFC.
Harmonogram požadovaného LFC je vytvorený na základe požiadaviek, ktoré sa vzťahujú na navrhnutý riadiaci systém. Požadovaný LFC možno podmienečne rozdeliť na tri časti: nízkofrekvenčné, stredofrekvenčné a vysokofrekvenčné.
2.1 Nízkofrekvenčná časť určuje statickú presnosť systému, presnosť v ustálených stavoch. V statickom systéme je nízkofrekvenčná asymptota rovnobežná s osou x. V astatickom systéme je sklon tejto asymptoty –20 mdB/dec, kde je rád astatizmu (= 1,2). Ordináta nízkofrekvenčnej časti Lz je určená hodnotou koeficientu prenosu K systému s otvorenou slučkou. Čím širšia je nízkofrekvenčná časť Lz, tým viac vysokých frekvencií systém reprodukuje bez útlmu v uzavretej slučke.
2.2 Stredofrekvenčná časť je najdôležitejšia, pretože určuje stabilitu, rezervu stability a následne kvalitu prechodových procesov, zvyčajne hodnotených indikátormi kvality prechodovej odozvy. Hlavnými parametrami stredofrekvenčnej asymptoty sú jej strmosť a medzná frekvencia cp (frekvencia, pri ktorej Lz pretína os x). Čím väčší je sklon stredofrekvenčnej asymptoty, tým ťažšie je zabezpečiť dobré dynamické vlastnosti systému. Preto je najvhodnejšia strmosť -20 dB/dec a extrémne zriedkavo prekročí -40 dB/dec.. Medzná frekvencia cf určuje výkon systému a hodnotu hodnoty prekmitu. Čím väčšie cp, tým vyššia rýchlosť, čím kratší je regulačný čas Tpp prechodovej odozvy, tým väčší prekmit.
2.3 Vysokofrekvenčná časť LFC má malý vplyv na dynamické vlastnosti systému. Je lepšie mať sklon jej asymptoty čo najväčší, čím sa znižuje potrebný výkon výkonného orgánu a vplyv vysokofrekvenčného rušenia. Niekedy sa pri výpočte neberie do úvahy vysokofrekvenčný LFC.

kde je koeficient závislý od veľkosti prekročenia,
Musí sa vybrať podľa plánu znázorneného na obrázku 1.

Obrázok 18 - Graf na určenie prípustného prekročenia koeficientu.
Ordináta nízkofrekvenčnej asymptoty sa určí podľa koeficientu
zisk a sklon vysokofrekvenčnej asymptoty prechodného CAP s otvorenou slučkou.
3. Stanovenie parametrov korekčného zariadenia.
3.1 Graf LFC korekčného zariadenia sa získa odčítaním hodnôt nemenného grafu od hodnoty grafu požadovaného LFC, po čom sa z LFC korekčného zariadenia určí jeho prenosová funkcia.
3.2 Na základe prenosovej funkcie regulátora sa vyberie elektrický obvod na realizáciu korekčného zariadenia a vypočítajú sa hodnoty jeho parametrov. Obvod regulátora môže byť založený na pasívnych alebo aktívnych prvkoch.
3.3 Prenosová funkcia korekčného zariadenia, získaná v odseku 3.1, je zahrnutá do zovšeobecneného blokového diagramu ACS Pomocou zovšeobecneného blokového diagramu korigovaného ACS sa pomocou počítača zostrojia grafy prechodných procesov, ktoré by nemali byť horšie ako dané.
Príklad:
6. Syntéza automatického riadiaceho systému metódou logaritmických frekvenčných charakteristík.
Syntéza lineárnych samohybných zbraní
Základné pojmy syntézy riadiaceho systému
Všetky matematické problémy riešené v teórii automatického riadenia možno spojiť do dvoch veľkých tried - problémy analýzy a problémy syntézy automatických systémov.
Pri analytických úlohách je štruktúra systému úplne známa, sú špecifikované všetky (spravidla) parametre systému a je potrebné odhadnúť niektoré jeho štatistické alebo dynamické vlastnosti. Úlohy analýzy zahŕňajú výpočet presnosti v podmienkach ustáleného stavu, určenie stability a hodnotenie kvality systému.
Úlohy syntézy možno považovať za opak analytických problémov: vyžadujú určenie štruktúry a parametrov systému podľa daných ukazovateľov kvality. Najjednoduchšie úlohy syntézy sú napríklad problém určenia koeficientu prenosu otvorenej slučky na základe danej chyby alebo podmienky minima integrálneho odhadu.
Syntéza lineárnych automatických riadiacich systémov znamená výber takého konštrukčného diagramu, jeho parametrov a charakteristík, ktoré na jednej strane spĺňajú stanovené ukazovatele kvality a jednoduchosti technickej realizácie a spoľahlivosti na strane druhej.
Vlastnosti syntézy
Súčasťou ACS je riadiaci objekt a korekčné zariadenia (sú to zariadenia, ktorých štruktúra a parametre sa menia v súlade s úlohou syntézy).
Stanovenie indikátorov kvality je definované ako horná hranica akceptovateľných indikátorov kvality, t.j. špecifikované ukazovatele kvality určujú oblasť rozhodovania. Preto sa počas syntézy volí optimalizačné kritérium, ktoré umožňuje určiť jednoznačný výber štruktúry a parametrov ACS.
V prípade moderných samohybných zbraní postup syntézy určuje približné charakteristiky samohybných zbraní, takže konečný výsledok sa získa ako výsledok analýzy (ladenia, modelovania) syntetizovaných samohybných zbraní.
Etapy syntézy ACS
Kontrolný objekt sa analyzuje, určia sa statické a dynamické charakteristiky objektu.
Na základe špecifikovaných ukazovateľov kvality ACS je určené optimalizačné kritérium.
Zostaví sa konštrukčný diagram ACS a vyberú sa technické prostriedky na jeho realizáciu.
Syntéza optimálnych dynamických charakteristík.
Aproximácia optimálneho dynamického režimu, t.j. výber dynamických charakteristík (požadovaných), ktoré spĺňajú stanovené ukazovatele kvality a jednoduchosť technickej realizácie nápravných zariadení.
Stanovenie dynamických charakteristík korekčných zariadení, ktoré poskytujú požadované dynamické charakteristiky celého systému.
Výber schémy a spôsobu technickej realizácie korekčných zariadení podľa danej dynamickej charakteristiky korekčného zariadenia.
Analýza syntetizovaných samohybných zbraní.
Syntéza systémov metódou LFC
Existujú dva spôsoby aktivácie korekčných zariadení:
Dôsledne k riadiacemu objektu.
Tu W 0 (p) je prenosová funkcia objektu, a W jadro (R)– prenosová funkcia korekčného zariadenia.
Dôstojnosť sekvenčný spínací obvod je jednoduchosť technickej realizácie.
nedostatky: vysoká citlivosť tohto obvodu na rušenie; silná závislosť od zmien parametrov objektu.
Paralelne s niektorou časťou objektu.
D

nedostatky: Korekčné zariadenie tohto obvodu je na rozdiel od obvodu (1) realizované drahými obvodmi.
Ako dynamická charakteristika, ktorou sa syntetizuje ACS, sa vyberie LFC systému s otvorenou slučkou objektu, pretože je celkom jednoduché určiť parametre objektu.
Požadované LAC
Pri konštrukcii požadovaného LFC sa rozlišujú tri frekvenčné rozsahy:
Nízke frekvencie ( s). Tento frekvenčný rozsah odráža statické charakteristiky.
Stredný rozsah ( s). Určuje dynamické charakteristiky objektu pod vplyvom stupňovitého vstupu.
Rozsah výšok ( s). Tento frekvenčný rozsah neovplyvňuje statiku, ale určuje dynamické charakteristiky objektu pod rýchlo sa meniacim vstupným vplyvom.
Modálny regulátor.
Ide o metódu koreňovej syntézy, konkrétne podľa požadovaného umiestnenia koreňov charakteristickej rovnice v komplexnej rovine sa zostrojí modálny regulátor, ktorý predstavuje záporné koeficienty spätnej väzby pre každú dynamickú premennú.

Popis objektu je uvedený:

Nastavíme typ požadovaného polynómu D zhel (p) - v súlade s danými (požadovanými) ukazovateľmi kvality.
Predstavme spätnú väzbu ako:

Kde  - charakteristická rovnica sústavy s regulátorom.
- charakteristická rovnica sústavy s regulátorom.
Príklad: Daná sústava rovníc


n 1 U x 1 x 2 x 3


Musíme zvážiť maticu ovládateľnosti:

 Systém je ovládateľný, pretože poradie sa rovná poradiu systému
Systém je ovládateľný, pretože poradie sa rovná poradiu systému
Vyberieme požadovaný polynóm rovnakého stupňa ako systém:
D žltá (p) = (p+w 0 ) 3 =p 3 +3p 2 w 0 +3pw 0+ w 0 3


 - hodnotenie kvality, kde
- hodnotenie kvality, kde  - prechodný čas
- prechodný čas
Pri výbere  dostaneme:
dostaneme:
K oc1 = 2; K oc2 = -1; K oc3 =5;
Ovládateľnosť a pozorovateľnosť.
Systém sa nazýva regulovateľný, ak je možné zmenou ktoréhokoľvek zo vstupných signálov dosiahnuť požadovanú hodnotu na výstupe systému v konečnom čase.

bez neho bude systém nekontrolovateľný a s ním -
kontrolované.
Kritérium ovládateľnosti.
Aby bol systém ovládateľný, je potrebné a postačujúce, aby sa hodnosť matice ovládateľnosti rovnala n (poradie objektu).
Vo všeobecnosti je matica ovládateľnosti obdĺžniková. Ak má systém jeden vstup, matica má rozmer  .
.
Pozorovateľnosť.
Systém sa nazýva pozorovateľný, ak stavové premenné X možno rekonštruovať z výstupných signálov Y.
Pozorovateľnosť na rozdiel od merateľnosti zahŕňa nielen meranie stavových premenných X, ale aj výpočet nemerateľných premenných X z nameraných.
Merateľnosť je prípad, keď je možné priamo merať akúkoľvek premennú.
Kritérium pozorovateľnosti.
Aby bol systém pozorovateľný, je potrebné a postačujúce, aby sa hodnosť matice pozorovateľnosti rovnala n (poradie objektu).