Cip PWM cu control digital. Controler PWM: circuit, principiu de funcționare, control
De exemplu);
Instrucțiuni pentru utilizarea PWM în Arduino
1 Informații generale despre modularea lățimii impulsului
Pinii digitali Arduino pot scoate doar două valori: 0 logic (LOW) și logic 1 (HIGH). De aceea sunt digitale. Dar Arduino are pini „speciali”, care sunt desemnați PWM. Ele sunt uneori indicate printr-o linie ondulată „~” sau încercuite sau altfel se disting de altele. PWM înseamnă Modularea lățimii impulsului sau modularea lățimii impulsului, PWM.
Un semnal modulat pe lățime de impuls este un semnal de impuls de frecvență constantă, dar variabilă ciclu de lucru(raportul dintre durata pulsului și perioada de repetare a acestuia). Datorită faptului că majoritatea proceselor fizice din natură au inerție, căderile bruște de tensiune de la 1 la 0 vor fi netezite, luând o valoare medie. Prin setarea ciclului de lucru, puteți modifica tensiunea medie la ieșirea PWM.
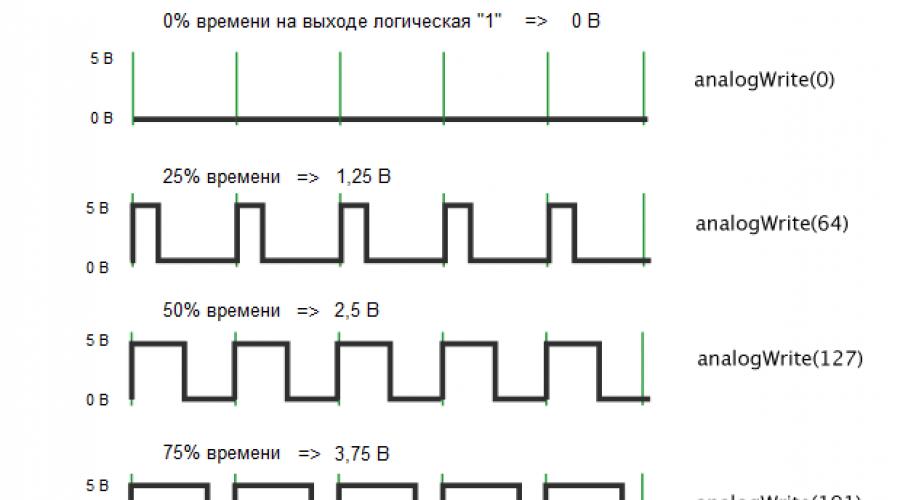
Dacă ciclul de lucru este de 100%, atunci ieșirea digitală a Arduino va avea întotdeauna o tensiune logică de „1” sau 5 volți. Dacă setați ciclul de lucru la 50%, atunci jumătate din timp ieșirea va fi logic „1” și jumătate din timp - logic „0”, iar tensiunea medie va fi de 2,5 volți. Și așa mai departe.

În program, ciclul de funcționare este specificat nu ca procent, ci ca număr de la 0 la 255. De exemplu, comanda analogWrite(10, 64) va spune microcontrolerului să trimită un semnal cu un ciclu de lucru de 25% către ieșirea digitală PWM nr. 10.
Pinii Arduino cu funcție de modulare a lățimii impulsului funcționează la o frecvență de aproximativ 500 Hz. Aceasta înseamnă că perioada de repetare a pulsului este de aproximativ 2 milisecunde, care este măsurată prin liniile verticale verzi din figură.
Se pare că putem simula un semnal analogic pe o ieșire digitală! Interesant, nu?!Cum putem folosi PWM? O mulțime de aplicații! De exemplu, controlați luminozitatea unui LED, viteza de rotație a motorului, curentul tranzistorului, sunetul de la un emițător piezo, etc...
2 Diagrama pentru demonstrație Modularea lățimii pulsului în Arduino
Să ne uităm la cel mai de bază exemplu - controlul luminozității unui LED folosind PWM. Să punem cap la cap o schemă clasică.

3 Exemplu de schiță cu PWM
Să deschidem schița „Fade” din exemple: Exemple de fișiere 01. Elemente de bază Fade.

Să-l schimbăm puțin și să-l încărcăm în memoria Arduino.
Int ledPin = 3; // declar un pin care controlează luminozitatea LED-ului int = 0; // variabilă pentru setarea luminozității int fadeAmount = 5; // pas de schimbare a luminozității void setup() ( pinMode(ledPin, OUTPUT); } void loop() ( analogWrite(ledPin, luminozitate); // setați luminozitatea ledPin pin brightness += fadeAmount; // modificați valoarea luminozității /* când atingeți limitele 0 sau 255, schimbați direcția schimbării luminozității */ dacă (luminozitate == 0 || luminozitate == 255) ( fadeAmount = -fadeAmount; // schimbați semnul de pasul ) întârziere (30); // întârziere pentru o mai mare vizibilitate a efectului }
4 Controlul luminozității LED folosind PWM și Arduino
Porniți alimentarea. LED-ul crește treptat luminozitatea și apoi scade ușor. Am simulat un semnal analogic la ieșirea digitală folosind modularea lățimii impulsului.

Urmăriți videoclipul atașat, care arată clar modificarea luminozității LED-ului pe osciloscopul conectat, puteți vedea cum se modifică semnalul de la Arduino.
Să ne uităm la ce este PWM sau PWM. Și, de asemenea, care este diferența dintre PWM și WIDTH. Algoritmul de modulare a lățimii impulsului este utilizat pentru a schimba fără probleme puterea la sarcina care vine de la sursa de alimentare. De exemplu, pentru a regla viteza de rotație a arborelui motorului; netezimea modificărilor luminozității luminii sau a luminii de fundal. O zonă largă separată de aplicație PWM este comutarea surselor de alimentare și invertoarele autonome.
Pentru a alimenta o sarcină, este adesea necesar să schimbați tensiunea furnizată de la sursa de alimentare. În principiu, se pot distinge două metode de reglare a tensiunii: liniară și pulsată.

Un exemplu de metodă liniară ar fi. În acest caz, o parte semnificativă a puterii este pierdută prin rezistor. Cu cât diferența de tensiune dintre sursa de alimentare și consumator este mai mare, cu atât este mai mare pierderea de putere, care pur și simplu „arde” pe rezistor, transformându-se în căldură. Prin urmare, este rațional să folosiți metoda de control liniar numai atunci când există o mică diferență între tensiunile de intrare și de ieșire. În caz contrar, eficiența sursei de alimentare în ansamblu va fi foarte scăzută.

În tehnologia modernă a convertoarelor, controlul puterii în impulsuri la sarcină este utilizat în mod predominant. Una dintre modalitățile de implementare a reglarii pulsului este modulație pe lățimea impulsului PWM . În literatura engleză PWM – modulație pe lățimea impulsurilor .

Principiul controlului pulsului
Elementele principale ale oricărui tip de regulator de putere de comutare sunt întrerupătoarele semiconductoare - tranzistoare sau tiristoare. În forma sa cea mai simplă, circuitul unei surse de alimentare comutatoare este după cum urmează. Sursa de tensiune constanta Uip cheie K conectat la sarcină N. Cheie LA comută la o anumită frecvență și rămâne în starea de pornire pentru o anumită perioadă de timp. Pentru a simplifica diagrama, nu descriu alte elemente necesare pe ea. În acest context, ne interesează doar funcționarea cheii LA.

Pentru a înțelege principiul PWM, vom folosi următorul grafic. Să împărțim axa timpului în intervale egale, numite perioada T. Acum, de exemplu, vom închide cheia pentru jumătate din perioadă K. Când cheia este închisă, la sarcină N tensiunea este furnizată de la sursa de alimentare Uip. A doua parte a semiciclului cheii este în stare închisă. Iar consumatorul va rămâne fără curent.

Este apelat timpul în care cheia este închisă timpul pulsului t . Și se numește durata tastei deschise timp de pauză tп . Dacă măsurați tensiunea pe sarcină, aceasta va fi egală cu jumătate Uip.
Tensiunea medie pe sarcină poate fi exprimată prin următoarea relație:
Uav.n = Uip ti/T.
Raportul timp al pulsului t si la perioada T numit ciclu de lucru D . Și reciproca ei se numește ciclu de lucru :
S = 1/D = T/ti.
În practică, este mai convenabil să folosiți factorul de umplere, care este adesea exprimat ca procent. Când tranzistorul este complet deschis pe tot parcursul timpului, ciclul de lucru D este egal cu unu sau 100%.
Dacă D = 50%, atunci aceasta înseamnă că jumătate din timpul perioadei în care tranzistorul este în stare deschisă și jumătate în stare închisă. În acest caz, forma semnalului se numește undă pătrată.
Prin urmare, prin schimbarea coeficientului D de la 0 la unitate sau la 100%, puteți modifica valoarea Uav.n de la 0 la Uip:
Uav.n = Uip∙D.
Și, în consecință, reglați cantitatea de energie furnizată:
Pav.n = Pip∙D.
În literatura occidentală, practic nu există nicio distincție între conceptele de reglare a lățimii impulsului a WID și modularea lățimii impulsului a PWM. Totuși, mai avem o diferență între ele.
În zilele noastre, multe microcircuite, în special cele utilizate în convertoarele DC-DC, implementează principiul WID. Dar în același timp sunt numite controlere PWM. Prin urmare, acum nu există practic nicio diferență de nume între aceste două metode.
 În orice caz, pentru a forma o anumită durată a impulsului furnizată bazei tranzistorului și deschiderea acesteia din urmă, se folosesc surse de tensiune de referință și setare, precum și un comparator.
În orice caz, pentru a forma o anumită durată a impulsului furnizată bazei tranzistorului și deschiderea acesteia din urmă, se folosesc surse de tensiune de referință și setare, precum și un comparator.
Să luăm în considerare un circuit simplificat în care bateria GB alimentează consumatorul Rn în impulsuri prin tranzistorul VT. Voi spune imediat că în acest circuit nu am folosit în mod special astfel de elemente necesare pentru funcționarea circuitului: un condensator, un inductor și o diodă. Acest lucru se face pentru a simplifica înțelegerea funcționării PWM-ului și nu a întregului convertor.
Pentru a spune simplu, un comparator are trei terminale: două intrări și o ieșire. Comparatorul funcționează după cum urmează. Dacă valoarea tensiunii la pinul de intrare „+” (intrare fără inversare) este mai mare decât la intrarea „-” (intrare inversoare), atunci ieșirea comparatorului va fi un semnal de nivel înalt. În caz contrar - nivel scăzut.
În cazul nostru, semnalul de nivel înalt este cel care deschide tranzistorul VT. Să luăm în considerare modul în care se formează durata de timp necesară a impulsului ti. Pentru a face acest lucru, vom folosi următorul grafic.

Cu WID, un semnal din dinte de ferăstrău de o anumită frecvență este furnizat la o intrare a comparatorului. Se mai numește și suport. A doua intrare este alimentată cu o tensiune de referință, care este comparată cu tensiunea de referință. Ca rezultat al comparației, la ieșirea comparatorului se formează un impuls de durata corespunzătoare.
Dacă există un semnal de referință la intrarea neinversoare a comparatorului, atunci va exista mai întâi o pauză și apoi un impuls. Dacă un semnal principal este aplicat la intrarea neinversoare, va exista mai întâi un impuls, apoi o pauză.
![]()
Astfel, prin modificarea valorii semnalului specificat, puteți modifica ciclul de funcționare și, în consecință, tensiunea medie la sarcină.
Ei se străduiesc să facă frecvența semnalului de referință maximă pentru a reduce parametrii choke-urilor și condensatorilor (neprezentați în diagramă). Acesta din urmă duce la o reducere a greutății și dimensiunilor sursei de alimentare comutatoare.
PWM – modularea lățimii impulsului
PWM este folosit predominant pentru a genera un semnal sinusoidal. PWM este adesea folosit pentru a controla funcționarea unui convertor invertor. Invertorul este proiectat să transforme energia DC în energie AC.
Să luăm în considerare cea mai simplă schemă.
![]()
La un moment dat, se deschide o pereche de tranzistoare VT1 și VT3. Este creată o cale pentru fluxul de curent din baterie GB prin sarcina activ-inductivă RнLн. În momentul următor, VT1 și VT3 sunt blocate, iar tranzistoarele diagonal opuse VT2 și VT4 sunt deschise. Acum curentul curge din baterie prin RnLn în direcția opusă. Astfel, curentul prin sarcină își schimbă direcția și, prin urmare, este variabil. După cum puteți vedea, curentul de sarcină nu este sinusoidal. Prin urmare, PWM este utilizat pentru a obține o formă de undă de curent sinusoidal.
![]()
Există mai multe tipuri de PWM: unipolar, bipolar, unidirecțional, bidirecțional. Aici nu ne vom opri asupra fiecărui tip specific, ci vom lua în considerare abordarea generală.
Un sinusoid este utilizat ca semnal de modulare, iar un semnal triunghiular este folosit ca semnal de referință. Ca urmare a comparării acestor semnale se formează duratele impulsurilor și pauzelor (graficul inferior), care controlează funcționarea tranzistoarelor VT1...VT4.
Vă rugăm să rețineți că amplitudinea tensiunii pe sarcină este întotdeauna egală cu amplitudinea sursei de alimentare. Perioada de repetare a pulsului rămâne, de asemenea, neschimbată. Se modifică doar lățimea impulsului de deschidere. Prin urmare, atunci când o sarcină este conectată, curentul care curge prin ea va avea o formă sinusoidală (indicată de linia punctată în graficul de jos).
Deci, principala diferență dintre WIDTH și PWM este că, cu controlul lățimii impulsului, timpii de impuls și pauză rămân constante. Și cu modularea lățimii impulsurilor, durata impulsurilor și pauzelor se schimbă, ceea ce face posibilă realizarea unui semnal de ieșire de o formă dată.

LED-urile sunt folosite în aproape toate tehnologiile din jurul nostru. Adevărat, uneori devine necesară ajustarea luminozității acestora (de exemplu, în lanterne sau monitoare). Cea mai ușoară cale de ieșire în această situație pare să fie schimbarea cantității de curent care trece prin LED. Dar asta nu este adevărat. LED-ul este o componentă destul de sensibilă. Schimbarea constantă a cantității de curent îi poate scurta în mod semnificativ durata de viață sau chiar o poate rupe. De asemenea, este necesar să țineți cont de faptul că nu puteți utiliza un rezistor de limitare, deoarece excesul de energie se va acumula în acesta. Acest lucru este inacceptabil atunci când utilizați baterii. O altă problemă cu această abordare este că culoarea luminii se va schimba.
Există două opțiuni:
- Reglarea PWM
- Analogic
Aceste metode controlează curentul care trece prin LED, dar există anumite diferențe între ele.
Controlul analogic modifică nivelul de curent care trece prin LED-uri. Și PWM reglează frecvența alimentării cu curent.
Reglarea PWM
O cale de ieșire din această situație poate fi utilizarea modulării lățimii impulsului (PWM). Cu acest sistem, LED-urile primesc curentul necesar, iar luminozitatea este reglată folosind o sursă de alimentare de înaltă frecvență. Adică, frecvența perioadei de alimentare modifică luminozitatea LED-urilor.
Avantajul incontestabil al sistemului PWM este menținerea productivității LED-ului. Eficiența va fi de aproximativ 90%.
Tipuri de reglare PWM
- Două fire. Folosit adesea în sistemele de iluminat auto. Sursa de alimentare a convertorului trebuie să aibă un circuit care generează un semnal PWM la ieșirea DC.
- Dispozitiv de șunt. Pentru a face perioada de pornire/oprire a convertorului, utilizați o componentă de șunt care oferă o cale pentru curentul de ieșire, altul decât LED-ul.
Parametrii de puls pentru PWM
Rata de repetare a pulsului nu se modifică, deci nu există cerințe pentru aceasta în determinarea luminozității luminii. În acest caz, se modifică doar lățimea sau timpul pulsului pozitiv.

Frecvența pulsului
Chiar și ținând cont de faptul că nu există reclamații speciale cu privire la frecvență, există valori limită. Ele sunt determinate de sensibilitatea ochiului uman la pâlpâire. De exemplu, într-un film, cadrele trebuie să clipească cu 24 de cadre pe secundă pentru ca ochii noștri să-l perceapă ca o singură imagine în mișcare.
Pentru ca lumina pâlpâitoare să fie percepută ca lumină uniformă, frecvența trebuie să fie de cel puțin 200 Hz. Nu există restricții privind indicatorii superiori, dar nu există nicio cale mai jos.
Cum funcționează un regulator PWM?
O etapă cheie cu tranzistor este utilizată pentru a controla direct LED-urile. De obicei, folosesc tranzistori care pot acumula cantități mari de putere.
Acest lucru este necesar atunci când utilizați benzi LED sau LED-uri de mare putere.
Pentru cantități mici sau putere redusă este suficientă utilizarea tranzistoarelor bipolare. De asemenea, puteți conecta LED-urile direct la microcircuite.
generatoare PWM
Într-un sistem PWM, un microcontroler sau un circuit constând din circuite cu integrare scăzută poate fi utilizat ca oscilator principal.
De asemenea, este posibil să se creeze un regulator din microcircuite care sunt proiectate pentru comutarea surselor de alimentare, sau cipuri logice K561 sau temporizator integrat NE565.
Meșterii folosesc chiar și un amplificator operațional în aceste scopuri. Pentru a face acest lucru, pe el este asamblat un generator, care poate fi reglat.
Unul dintre cele mai utilizate circuite se bazează pe cronometrul 555 Este, în esență, un generator de unde pătrate obișnuite. Frecvența este reglată de condensatorul C1. la iesire condensatorul trebuie sa aiba o tensiune mare (aceasta este la fel si cu conexiunea la sursa de alimentare pozitiva). Și se încarcă atunci când există o tensiune scăzută la ieșire. Acest moment dă naștere la impulsuri de diferite lățimi.
Un alt circuit popular este PWM bazat pe cipul UC3843. în acest caz, circuitul de comutare a fost schimbat spre simplificare. Pentru a controla lățimea impulsului, este utilizată o tensiune de control cu polaritate pozitivă. În acest caz, ieșirea produce semnalul de impuls PWM dorit.
Tensiunea de reglare acționează asupra ieșirii astfel: pe măsură ce scade, lățimea crește.

De ce PWM?
- Principalul avantaj al acestui sistem este ușurința sa. Modelele de utilizare sunt foarte simple și ușor de implementat.
- Sistemul de control PWM oferă o gamă foarte largă de reglare a luminozității. Dacă vorbim de monitoare, este posibil să folosiți iluminarea de fundal CCFL, dar în acest caz luminozitatea poate fi redusă doar la jumătate, deoarece iluminarea de fundal CCFL este foarte pretențioasă în ceea ce privește cantitatea de curent și tensiune.
- Folosind PWM, puteți menține curentul la un nivel constant, ceea ce înseamnă că LED-urile nu vor fi deteriorate și temperatura de culoare nu se va schimba.
Dezavantajele utilizării PWM
- În timp, pâlpâirea imaginii poate deveni destul de vizibilă, mai ales la luminozitate scăzută sau cu mișcarea ochilor.
- În condiții de lumină puternică constantă (cum ar fi lumina soarelui), imaginea poate deveni neclară.
8. Modularea lățimii impulsului în convertoare
8.1. Informații generale
Principiile controlului și modulării impulsurilor sunt discutate în capitolul. 4 folosind exemplul unui circuit regulator DC simplu. În același timp, sunt date definiții ale principalelor tipuri de modulație a impulsurilor utilizate în teoria sistemelor de impulsuri liniare, care corespund practicii de control al convertoarelor DC cu impulsuri.
Cu toate acestea, modularea lățimii de impuls a tensiunilor sau a curenților în convertoarele AC are o definiție ușor diferită în electronica de putere, ținând cont de caracteristicile PWM atunci când se rezolvă problemele de conversie a energiei electrice folosind curent alternativ. După cum este definită în IEC 551-16-30, modularea lățimii impulsurilor este un control al impulsurilor în care lățimea sau frecvența impulsurilor, sau ambele, sunt modulate într-o perioadă a frecvenței fundamentale pentru a produce o formă de undă specifică a tensiunii de ieșire. În cele mai multe cazuri, PWM este efectuat pentru a asigura sinusoiditatea tensiunii sau curentului, adică reducerea nivelului armonicilor superioare în raport cu armonica principală (prima) și se numește sinusoidal. Există următoarele metode principale pentru asigurarea sinusoidității: PWM analogic și modificările acestuia; suprimarea selectivă (selectivă) a armonicilor superioare; histerezis sau modulație delta;
modulație vectorială spațială.
Versiunea clasică de organizare a unui PWM sinusoidal analogic este de a modifica lățimea impulsurilor care formează tensiunea de ieșire (curent) prin compararea unui semnal de tensiune de o formă dată, numit referință sau referință, cu un semnal de tensiune triunghiular având o frecvență mai mare. și numit semnal purtător. Semnalul de referință este modulant și determină forma necesară a tensiunii de ieșire (curent). Există multe modificări ale acestei metode în care semnalele de modulare sunt reprezentate de funcții speciale, altele decât unda sinusoidală. Notele cursului vor discuta câteva circuite de bază care explică aceste metode PWM.
Metoda de suprimare selectivă a armonicilor superioare este implementată în prezent cu succes utilizând controlere cu microprocesor bazate pe software. Modulația histerezis se bazează pe principiile „urmăririi” releului a unui semnal de referință, de exemplu, o formă de undă sinusoidală. În cel mai simplu design tehnic, această metodă combină principiile PWM și PFM (modularea frecvenței pulsului). Cu toate acestea, prin măsuri speciale de circuit este posibilă stabilizarea frecvenței de modulație sau limitarea domeniului modificării acesteia.
Metoda de modulare a vectorului spațial se bazează pe conversia unui sistem de tensiune trifazat într-un sistem bifazat și obținerea unui vector spațial generalizat. Mărimea acestui vector este calculată în momente determinate de frecvențele fundamentale și modulante. Este considerat foarte promițător pentru controlul invertoarelor trifazate, în special atunci când este utilizat în acționările electrice. În același timp, este în multe privințe similar cu PWM sinusoidal tradițional.
Sistemele de control bazate pe PWM permit nu numai să ofere o formă sinusoidală a valorilor medii ale armonicii fundamentale de tensiune sau curent, ci și să controleze valorile amplitudinii, frecvenței și fazei acesteia. Deoarece în aceste cazuri convertorul folosește comutatoare complet controlate, devine posibilă implementarea funcționării convertoarelor AC (DC) împreună cu rețeaua AC în toate cele patru cadrane în ambele moduri de redresare și inversare cu orice valoare dată a factorului de putere armonic fundamental cosφ în intervalul de la -1 la 1. Mai mult, odată cu creșterea frecvenței purtătoarelor, posibilitățile de reproducere a curentului și tensiunii de o formă dată la ieșirea invertoarelor se extind. Acest lucru vă permite să creați filtre active pentru a suprima armonicile superioare.
Vom lua în considerare principalele definiții utilizate în prezentarea ulterioară folosind exemplul de aplicare a primei metode într-un circuit monofazat în semipunte al unui invertor de tensiune (Fig. 8.1, O). În această diagramă condiționată cheile S1 Şi S2 sunt reprezentate de elemente de comutare complet controlate, completate de diode conectate în serie și paralel cu acestea. Diodele în serie reflectă conductivitatea unidirecțională a comutatoarelor (de exemplu, tranzistoare sau tiristoare), iar diodele paralele asigură conducerea curenților inversi cu o sarcină activ-inductivă.
Diagrame de referință, modulante u M(θ) și purtător u Semnalele H (θ) sunt prezentate în Fig. 8.1, b. Formarea impulsurilor de control cheie S 1 și S 2 se realizează după următorul principiu. La u M (θ) > u Tasta H(θ). S 1 este pornit, a S 2 oprit. La u M(θ)< u Stările cheie H (θ) sunt inversate: S 2 - pe, a S 1 - oprit. Astfel, la ieșirea invertorului este generată o tensiune sub formă de două impulsuri polare. În circuitele reale pentru a elimina conducerea simultană a comutatoarelor S 1 și S 2, ar trebui prevăzută o anumită întârziere între momentele de generare a semnalelor pentru a porni aceste taste. Evident, lățimea impulsului depinde de raportul amplitudinilor semnalului u M(θ) și u H(θ). Parametrul care caracterizează această relație se numește indice de modulație a amplitudinii și este determinat de formula (8.1):
, (8.1.)
Unde U M m și U H m - valorile maxime ale semnalului modulator u M(θ) și semnal purtător u H(θ) respectiv.


Orez. 8.1. Invertor de tensiune monofazat semi punte: O- schema; b– diagrame de tensiune pentru modularea impulsurilor
Frecvența purtătoare u H(θ) este egal cu frecvența de comutare f Tastele H S 1 și S 2 și, de obicei, depășește semnificativ frecvența semnalului de modulare f M. Raportul de frecvență f H și f M este un indicator important al eficienței procesului de modulare și se numește indice de modulație a frecvenței, care este determinat de formula (8.2):
La valori mici M f semnale u M(θ) și u H(θ) trebuie sincronizat pentru a evita subarmonicile nedorite. B ca valoare maximă Mele, care determină necesitatea sincronizării, este setat M f = 21. Evident, cu semnale sincronizate coeficientul M f este o valoare constantă.
Din diagrama din fig. 8.1 se poate observa că amplitudinea primei armonice a tensiunii de ieșire U am 1 poate fi prezentat, ținând cont de (8.1), sub următoarea formă (8.3):
![]() (8.3)
(8.3)
Conform (8.3) la M a = 1 amplitudinea primei armonice a tensiunii de ieșire este egală cu înălțimea dreptunghiului cu semiundă U d/2. Dependența caracteristică a valorii relative a primei armonice a tensiunii de ieșire de valoarea lui M a este prezentată în Fig. 8.2, din care reiese clar că modificarea M a de la 0 la 1 liniar și depinde de amplitudine U sunt 1. Valoarea limită M a este determinată de principiul tipului de modulație luat în considerare, conform căruia valoarea maximă U am 1 este limitat de înălțimea semiundei de formă dreptunghiulară, egală cu U d/2. Cu o creștere suplimentară a coeficientului M o modulație duce la o creștere neliniară a amplitudinii U am 1 la valoarea maximă determinată de formarea unei tensiuni dreptunghiulare la ieșirea invertorului, care ulterior rămâne neschimbată.
Extinderea funcției dreptunghiulare într-o serie Fourier dă valoarea maximă (8.4):
![]() (8.4)
(8.4)
Această valoare este limitată de valoarea indexului M a, variind în intervalul de la 0 la aproximativ 3. În mod evident, funcția în intervalul a-b valorile de la 1 la 3.2 este neliniară (Fig. 8.2). Modul de operare din această secțiune se numește supramodulație.
Sens M f determinată de alegerea frecvenței semnalului purtător u H (θ) și afectează în mod semnificativ caracteristicile tehnice ale convertorului. Pe măsură ce frecvența crește, pierderile de comutare în comutatoarele de putere ale convertoarelor cresc, dar în același timp compoziția spectrală a tensiunii de ieșire se îmbunătățește și soluția problemei de filtrare a armonicilor superioare cauzată de procesul de modulație este simplificată. Un factor important în alegerea unei valori f H în multe cazuri este necesitatea asigurării valorii sale în domeniul de frecvență audio mai mare de 20 kHz. La alegere f H ar trebui să luați în considerare, de asemenea, nivelul tensiunilor de funcționare ale convertorului, puterea acestuia și alți parametri.

Orez. 8.2. Dependența valorii relative a amplitudinii armonicii fundamentale a tensiunii de ieșire de indicele de modulație a amplitudinii pentru un circuit monofazat semi-punte
Tendința generală aici este o creștere a valorilor lui M f convertoare de joasă tensiune și de joasă tensiune și invers. Deci alegerea M f este o problemă de optimizare multicriterială.
Modularea pulsului cu proces stocastic. Utilizarea PWM în convertoare este asociată cu apariția armonicilor superioare în tensiuni și curenți modulați. Mai mult, în compoziția spectrală a acestor parametri, cele mai semnificative armonici apar la frecvențe care sunt multipli ai indicelui de modulație a frecvenței. M fşi armonici cu amplitudini descrescătoare grupate în jurul lor la frecvenţe laterale. Armonicele mai mari pot cauza următoarele probleme principale:
apariția zgomotului acustic;
deteriorarea compatibilităţii electromagnetice (EMC) cu alte dispozitive sau sisteme electrice.
Principalele surse de zgomot acustic sunt componentele electromagnetice (choke și transformatoare), care sunt expuse curentului și tensiunii care conțin armonici mai mari cu frecvențe din domeniul audio. Trebuie remarcat faptul că zgomotul poate apărea la anumite frecvențe unde armonicile mai mari sunt cele mai mari. Factorii care cauzează zgomot, cum ar fi magnetostricția, fac problemele EMC mai dificil de rezolvat. Problemele EMC pot apărea pe o gamă largă de frecvențe, în funcție de sensibilitatea EMI a dispozitivelor electrice. În mod tradițional, soluțiile de design și tehnologie au fost folosite pentru a reduce nivelurile de zgomot, iar filtrele pasive au fost folosite pentru a asigura EMC.
Ca o direcție promițătoare pentru rezolvarea acestor probleme, sunt luate în considerare metodele asociate cu schimbarea naturii compoziției spectrale a tensiunilor și curenților modulați. Esența acestor metode este de a nivela spectrul de frecvență și de a reduce amplitudinea armonicilor pronunțate datorită distribuției lor stocastice pe o gamă largă de frecvențe. Această tehnică este uneori numită „pătărea” spectrului de frecvență. Concentrația energiei de interferență scade la frecvențele în care armonicile pot avea valori maxime. Implementarea acestor metode nu este asociată cu niciun impact asupra componentelor părții de putere a convertoarelor și, în majoritatea cazurilor, este limitată de software cu modificări minore ale sistemului de control.
Să luăm în considerare pe scurt principiile de implementare a acestor metode. PWM se bazează pe o modificare a ciclului de lucru γ= t si / T n, Unde tși - durata pulsului; T n- perioada de formare a acestuia. De obicei, aceste cantități, precum și poziția pulsului pe intervalul perioadei T n sunt constante în condiții de regim staționar. Rezultatele PWM sunt definite ca valori medii integrale. În acest caz, valorile deterministe ale lui t și și, inclusiv poziția pulsului, determină compoziția spectrală nefavorabilă a parametrilor modulați. Dacă acestor mărimi li se dă un caracter aleator, menținând o valoare dată a lui γ, atunci procesele devin stocastice și compoziția spectrală a parametrilor modulați se modifică. De exemplu, un astfel de caracter aleatoriu poate fi dat poziției impulsului t iar pe intervalul perioadei T n sau oferă o modificare stocastică a acesteia din urmă. În acest scop, poate fi utilizat un generator de numere aleatorii, influențând generatorul principal de frecvență de modulație f n =1/T n. Într-un mod similar, puteți schimba poziția pulsului pe interval T n cu așteptarea matematică egală cu zero. Valoarea integrală medie γ trebuie să rămână la nivelul specificat de sistemul de control, drept urmare compoziția spectrală a armonicilor superioare în tensiuni și curenți modulați va fi egalizată.
Întrebări pentru autocontrol
1. Enumerați principalele metode PWM pentru asigurarea unui curent sau tensiune sinusoidal.
2. Care este diferența dintre modulația de tensiune unipolară și bipolară?
3. Listați principalii parametri ai PWM.
4. În ce scop este utilizat PWM cu procese stocastice?
Neînțelegerea funcționării PWM sau PWM (Pulse-width modulation) duce adesea nu numai la utilizarea lor incorectă, ci chiar și la erori în proiectarea dispozitivelor care utilizează PWM pentru control. Aici, limitându-ne la o aplicație anume, voi încerca să vă spun ce este PWM, de ce este necesar și cum funcționează.
În primul rând, ce este PWM?
Când este nevoie de PWM?
Motivul principal pentru utilizarea PWM este necesitatea de a furniza o tensiune DC mai scăzută pentru a alimenta dispozitivele electronice, menținând în același timp o eficiență ridicată, în special în acționările electrice controlate.
În rețelele interne ale echipamentelor, tensiunea de curent continuu a unui set limitat de tensiuni este utilizată pentru a alimenta dispozitivele, care adesea trebuie modificate pentru a se potrivi cerințelor unui anumit dispozitiv, pentru a-l stabiliza sau regla.
Acestea pot fi unități electrice de curent continuu, cipuri, componente de echipamente radio.
Reglarea poate fi efectuată folosind dispozitive de amortizare a tensiunii: rezistențe, tranzistori (dacă este necesară reglarea). Principalul dezavantaj al acestei soluții este pierderea de putere și creșterea generării de căldură pe dispozitivele de control.
Deoarece se știe că puterea eliberată este egală cu:
P = I x U sau P = I 2 x R W.
atunci cu cât este mai mare curentul I în circuit și căderea de tensiune U, cu atât mai mare este pierderea de putere Aici R este valoarea rezistenței elementului de control.
Imaginați-vă că trebuie să stingeți cel puțin 3V cu un curent de sarcină de 10A, acesta este deja 30 W irosit. Și fiecare watt de putere pierdută nu numai că reduce timpul de funcționare al surselor de alimentare, dar necesită și echipamente suplimentare pentru a elimina căldura generată de această putere.
Acest lucru se aplică și rezistențelor de stingere și dispozitivelor semiconductoare.
Acest mod vă permite să reduceți pierderile pe dispozitivul semiconductor de comutare la nivelul:
P max = I x U us
Pentru comutatoarele moderne cu semiconductori se apropie 0,3v și cu un consum de curent de 10 A, pierderile de putere se vor apropia de 3 W.
|
Acesta este în modul comutator, iar atunci când lucrați în dispozitive PWM, este și mai puțin. PWM folosește dispozitive semiconductoare în modul de comutare ca elemente cheie, adică tranzistorul este fie deschis (închis) fie închis (în stare de saturație) tot timpul. In primul caz Tranzistorul are o rezistență aproape infinită, deci curentul din circuit este foarte mic și, deși toată tensiunea de alimentare scade pe tranzistor, puterea eliberată de tranzistor este practic zero. În al doilea caz Rezistența tranzistorului este extrem de scăzută și, prin urmare, căderea de tensiune pe acesta este aproape de zero - puterea eliberată este, de asemenea, mică. În stările de tranziție |
(trecerea unui comutator de la o stare conducătoare la o stare neconductoare și înapoi) puterea eliberată în comutator este semnificativă, dar deoarece durata stărilor de tranziție este extrem de scurtă în raport cu perioada de modulație, puterea medie de comutare pierderile se dovedesc a fi nesemnificative.
Utilizarea PWM a făcut posibilă realizarea avantajelor modului cheie în circuitele care reduc și reglează tensiunea DC.
Repet, modularea lățimii impulsurilor este controlul valorii medii a tensiunii pe sarcina de integrare prin modificarea ciclului de lucru al impulsurilor folosind o cheie de control.
Funcționarea PWM pe o sarcină integratoare este prezentată în Fig. 1.
Figura 1
Condiția principală pentru o astfel de utilizare a PWM este prezența unei sarcini integratoare.
Deoarece valoarea amplitudinii tensiunii este egală cu E.
Acestea pot fi integratoare de circuite RC, LC, RLC sau RL și integratoare mecanice (de exemplu un motor electric).
Când PWM funcționează pe o sarcină integratoare, tensiunea - tensiunea DC echivalentă se modifică în funcție de ciclul de lucru (Q) al impulsurilor.< 1
Q = t și /T
aici: Q - ciclu de lucru, t și - durata impulsului, T - perioada de repetare a impulsului.
Luând în considerare ciclul de funcționare, tensiunea DC echivalentă va fi egală cu:
E eq = Q x E Volt
În realitate, la bornele de sarcină PWM se aplică o tensiune egală cu E, iar munca efectuată de curentul electric (sau numărul de rotații ale motorului electric) este determinată tocmai de E eq. La refacerea pe condensatorul de integrare obținem exact tensiunea E echivalentă.
Puterea alocată comutatorului de control controlat de PWM este egală cu:
P max = Q x I x U us
Încărcați diagrama de conectare la PWM.
PWM nu necesită soluții de circuit diferite de circuitul de comutare a motorului de curent continuu (un caz special de sarcină). Motorul electric este pur și simplu conectat la o sursă de alimentare care funcționează în modul PWM. Cu excepția cazului în care, în anumite situații, este necesar să se introducă o filtrare suplimentară a zgomotului care apare pe fronturile impulsurilor. Acest filtru din fig. 2 sub formă de condensatoare și o diodă de amortizare.

Figura 2
În fig. 2 arată o astfel de conexiune.
Vedem că comutatorul (tranzistorul cu efect de câmp) poate fi pur și simplu înlocuit cu un rezistor variabil.
Circuit PWM
În articolul „Adaptor pentru ventilator cu 3 pini la 4 pini” http://de1fer.ru/?p=45#more-45 proprietarul blogului oferă o diagramă a unui ventilator cu P WM.

Figura 3
aici: GND - masă (comun), Control - contact P WM control, +12 - tensiune de alimentare, Sense - ieșire senzor de viteză.
În acest circuit, controlul este posibil mai degrabă cu controlul curent continuu +I decât cu un semnal PWM.
Pentru a controla un semnal de impuls (PWM), este necesar circuitul prezentat în Fig. 4. Și judecând după parametrii tranzistorului „PWM”, acesta a fost ales special pentru controlul curentului continuu. Cel puțin va funcționa normal în acest mod cu un ventilator de până la 1,6 W.

Figura 4
Dar în modul de impuls fără condensator C, tranzistorul BC879 se va încălzi puțin mai puțin decât la curent continuu și motorul electric se poate opri la durate scurte de impuls de curent (viteze mici) datorită integrării sale la intrarea capacității de intrare C a tranzistorului.
Parametrii principali ai tranzistorului npn de înaltă frecvență bipolar siliciu BC879 de la SIEMENS
| PC max | Ucb max | Uce max | Web max | Icmax | Tj max, °C | Ft max |
| 800mW | 100V | 80V | 5V | 1A | 150°C | 200 MHz |
Dacă este necesar, dezactivați controlul PWM (PWM) în circuitul prezentat în Fig. 3 trebuie doar să conectați pinul de control la firul +12v.
Există o altă versiune a circuitului ventilatorului cu P WM pe forumul Radeon.ru

Figura 5
Diferențe semnificative față de fig. 3 nu, doar un tranzistor cu efect de câmp MOS cu un canal de tip p încorporat sau indus este folosit ca comutator controlat de PWM.
Acest circuit poate fi controlat atât de P WM, cât și de tensiune constantă (dar nu merită riscul - trebuie să cunoașteți parametrii tranzistorului).
Acest circuit este complet funcțional și nu prezintă dezavantajele circuitului prezentat în Fig. 3.
Pentru a-l opri (în funcție de tipul de tranzistor), trebuie doar să conectați pinul de control la firul + sau -.
Atenție bricolatorilor!
Dacă nu sunteți mulțumit de algoritmul de control PWM încorporat în placa de bază (placa de sistem).
Și ai un reobas (controler de control al ventilatorului) care ți se potrivește, apoi folosește un ventilator cu conector cu 3 pini.
Dacă un ventilator cu PWM vă este drag sau nu are un înlocuitor, atunci trebuie să dezactivați PWM folosind metoda descrisă mai sus, înlocuind conectorul cu 4 pini cu unul cu 3 pini și conectându-l la rheobass.
Dar amintiți-vă, utilizarea unui ventilator PWM în orice mod anormal nu vă va permite să obțineți performanța maximă.
Utilizarea controlului curentului continuu simultan cu PWM nu este recomandată din cauza unei reduceri a tensiunii de alimentare a ventilatorului cu 10-20%, ceea ce nu va permite unui astfel de ventilator să atingă performanța maximă.
Utilizarea simultană cu PWM - PWM de-a lungul circuitului de alimentare poate duce la instabilitatea periodică a funcționării ventilatorului (pot apărea bătăi de alunecare între frecvențele PWM - PWM de-a lungul circuitului de alimentare al sistemelor) și poate crea ambiguitate pentru sistemele echipate cu un sistem de stabilizare a vitezei . În plus, ca și în cazul precedent, tensiunea rezultată pe ventilator va scădea cu 10-15%, ceea ce nu va permite unui astfel de ventilator să atingă performanța maximă.
Concluzie
Așa că oprește-te la un singur lucru. Fie utilizați un ventilator PWM, fie utilizați controlul extern al ventilatorului prin circuitul de alimentare pe un ventilator cu un conector cu 3 pini.
Utilizarea PWM sau, așa cum spuneam, PWM crește eficiența dispozitivelor DC reducătoare de tensiune, ceea ce reduce generarea generală de căldură a dispozitivelor electronice cu PWM.
PWM vă permite să creați sisteme de antrenare electrice compacte de mare putere, controlate de curent continuu.
În dispozitivele moderne de control al tensiunii de curent continuu și stabilizatoarele de tensiune reduse, ajustările se fac de obicei folosind PWM. În acest scop, sunt produse controlere care necesită un minim de atașamente.
pregătit de A. Sorokin,