Микросхема шим с цифровым управлением. ШИМ-контроллер: схема, принцип работы, управление
Читайте также
Например);
Инструкция по использованию ШИМ в Arduino
1 Общие сведения о широтно-импульсной модуляции
Цифровые выводы Arduino могут выдавать только два значения: логический 0 (LOW, низкий уровень) и логическую 1 (HIGH, высокий). На то они и цифровые. Но есть у Ардуино «особые» выводы, которые обозначаются PWM . Их иногда обозначают волнистой чертой "~" или обводят кружочками или ещё как-то выделяют среди прочих. PWM расшифровывается как Pulse-width modulation или широтно-импульсная модуляция , ШИМ .
Широтно-импульсно модулированный сигнал - это импульсный сигнал постоянной частоты, но переменной скважности (соотношение длительности импульса и периода его следования). Из-за того, что большинство физических процессов в природе имеют инерцию, то резкие перепады напряжения от 1 к 0 будут сглаживаться, принимая некоторое среднее значение. С помощью задания скважности можно менять среднее напряжение на выходе ШИМ.
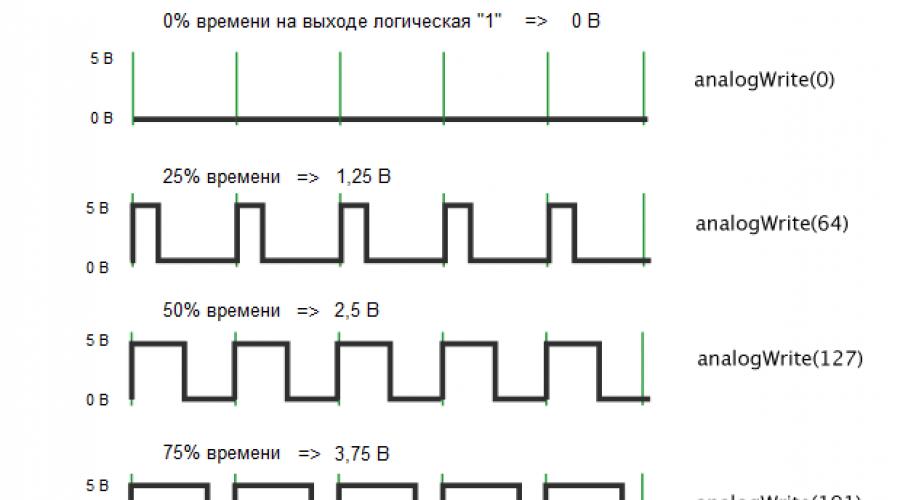
Если скважность равняется 100%, то всё время на цифровом выходе Arduino будет напряжение логическая "1" или 5 вольт. Если задать скважность 50%, то половину времени на выходе будет логическая "1", а половину - логический "0", и среднее напряжение будет равняться 2,5 вольтам. Ну и так далее.

В программе скважность задаётся не в процентах, а числом от 0 до 255. Например, команда analogWrite(10, 64) скажет микроконтроллеру подать на цифровой PWM выход №10 сигнал со скважностью 25%.
Выводы Arduino с функцией широтно-импульсной модуляции работают на частоте около 500 Гц. Значит, период следования импульсов - около 2 миллисекунд, что и отмеряют зелёные вертикальные штрихи на рисунке.
Получается, что мы можем сымитировать аналоговый сигнал на цифровом выходе! Интересно, правда?!Как же мы можем использовать ШИМ? Применений масса! Например, управлять яркостью светодиода, скоростью вращения двигателя, током транзистора, звуком из пьезоизлучателя и т.д.…
2 Схема для демонстрации широтно-импульсной модуляции в Arduino
Давайте рассмотрим самый базовый пример - управление яркостью светодиода с помощью ШИМ. Соберём классическую схему.

3 Пример скетча с ШИМ
Откроем из примеров скетч "Fade": Файл Образцы 01.Basics Fade .

Немного изменим его и загрузим в память Arduino.
Int ledPin = 3; // объявляем пин, управляющий светодиодом int brightness = 0; // переменная для задания яркости int fadeAmount = 5; // шаг изменения яркости void setup() { pinMode(ledPin, OUTPUT); } void loop() { analogWrite(ledPin, brightness); // устанавливаем яркость brightness на выводе ledPin brightness += fadeAmount; // изменяем значение яркости /* при достижении границ 0 или 255 меняем направление изменения яркости */ if (brightness == 0 || brightness == 255) { fadeAmount = -fadeAmount; // изменяем знак шага } delay(30); // задержка для большей видимости эффекта }
4 Управление яркостью светодиода с помощью PWM и Arduino
Включаем питание. Светодиод плавно наращивает яркость, а затем плавно уменьшает. Мы сымитировали аналоговый сигнал на цифровом выходе с помощью широтно-импульсной модуляции.

Посмотрите приложенные видео, где наглядно показано изменение яркости светодиода, на подключённом осциллографе видно, как при этом меняется сигнал с Arduino.
Рассмотрим, что такое ШИМ или PWM. А также, чем отличается ШИМ от ШИР. Алгоритм широтно-импульсной модуляции применяется для плавного изменения мощности на нагрузке, поступающей от источника питания. Например, с целью регулирования скорости вращения вала двигателя; плавности изменения яркости освещения или подсветки. Отдельной широкой областью применения ШИМ являются импульсные источники питания и автономные инверторы.
Для питания нагрузки часто необходимо изменять величину напряжения, подводимого от источника питания. Принципиально можно выделить два способа регулирования напряжения – линейный и импульсный.

Примером линейного способа может послужить . При этом значительная часть мощности теряется на резисторе. Чем больше разница напряжений источника питания и потребителя, тем ощутимей потери мощности, которая попросту «сгорает» на резисторе, превращаясь в тепло. Поэтому линейный способ регулирования рационально применять только при небольшой разнице входного и выходного напряжений. В противном случае коэффициент полезного действия источника питания в целом будет очень низкий.

В современной преобразовательной технике преимущественно используются импульсное регулирование мощности на нагрузке. Одним из способов реализации импульсного регулирования является широтно-импульсная модуляция ШИМ . В англоязычной литературе PWM – pulse-width modulation .

Принцип импульсного регулирования
Основными элементами любого типа импульсного регулятора мощности являются полупроводниковые ключи – транзисторы или тиристоры. В простейшем виде схема импульсного источника питания имеет следующий вид. Источника постоянного напряжения Uип ключом K подсоединяется к нагрузке Н . Ключ К переключается с определенной частотой и остается во включенном состоянии определенную длительность времени. С целью упрощения схемы я на ней не изображаю другие обязательные элементы. В данном контексте нас интересует только работа ключа К .

Чтобы понять принцип ШИМ воспользуемся следующим графиком. Разобьем ось времени на равные промежутки, называемые периодом T . Теперь, например половину периода мы будем замыкать ключ K . Когда ключ замкнут, к нагрузке Н подается напряжение от источника питания Uип. Вторую часть полупериода ключа находится в закрытом состоянии. А потребитель останется без питания.

Время, в течение которого ключ замкнут, называется временем импульса tи . А время длительности разомкнутого ключа называют временем паузы tп . Если измерить напряжение на нагрузке, то оно будет равно половине Uип .
Среднее значение напряжения на нагрузке можно выразить следующей зависимостью:
Uср.н = Uип tи/T.
Отношение времени импульса tи к периоду T называют коэффициентом заполнения D . А величина, обратная ему называется скважностью :
S = 1/D = T/tи .
На практике удобнее пользоваться коэффициентом заполнения, который зачастую выражают в процентах. Когда транзистор полностью открыт на протяжении всего времени, то коэффициент заполнения D равен единице или 100 %.
Если D = 50 %, то это означает, что половину времени за период транзистор находится в открытом состоянии, а половину в закрытом. В таком случае форма сигнала называется меандр.
Следовательно, изменяя коэффициент D от 0 до единицы или до 100 % можно изменять величину Uср.н от 0 до Uип:
Uср.н = Uип∙D.
А соответственно регулировать и величину подводимой мощности:
Pср.н = Pип∙D.
В западной литературе практически не различают понятия широтно-импульсного регулирования ШИР и широтно-импульсной модуляции ШИМ. Однако у нас различие между ними все же существует.
Сейчас во многих микросхемах, особенно применяемых в DC-DC преобразователях, реализован принцип ШИР. Но при этом их называют ШИМ контроллерами. Поэтому теперь различие в названии между этими двумя способами практически отсутствует.
 В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.
В любом случае для формирования определенной длительности импульса, подаваемого на базу транзистора и открывающего последний, применяют источники опорного и задающего напряжения, а также компаратор.
Рассмотрим упрощенную схему, в которой аккумуляторная батарея GB питает потребитель Rн импульсным способом посредством транзистора VT. Сразу скажу, что в данной схеме я специально не использовал такие элементы, необходимые для работы схемы: конденсатор, дроссель и диод. Это сделано с целью упрощения понимания работы ШИМ, а не всего преобразователя.
Упрощенно, компаратор имеет три вывода: два входа и один выход. Компаратор работает следующим образом. Если величина напряжения на входном выводе «+» (неинвертирующий вход) выше, чем на входе «-» (инвертирующий вход), то на выходе компаратора будет сигнал высокого уровня. В противном случае – низкого уровня.
В нашем случае, именно сигнал высокого уровня открывает транзистор VT. Рассмотрим, как формируется необходимая длительность времени импульса tи. Для этого воспользуемся следующим графиком.

При ШИР на одни вход компаратора подается сигнал пилообразной формы заданной частоты. Его еще называют опорным. На второй вход подается задающее напряжение, которое сравнивается с опорным. В результате сравнения на выходе компаратора формируется импульс соответствующей длительности.
Если на неинверитирующем входе компаратора опорный сигнал, то сначала будет идти пауза, а затем импульс. Если на неинвертирующий вход подать задающий сигнал, то сначала будет импульс, затем пауза.
![]()
Таким образом, изменяя значение задаваемого сигнала, можно изменять коэффициент заполнения, а соответственно и среднее напряжение на нагрузке.
Частоту опорного сигнала стремятся сделать максимальной, чтобы снизить параметры дросселей и конденсаторов (на схеме не показаны). Последнее приводит к снижению массы и габаритов импульсного блока питания.
ШИМ – широтно-импульсная модуляция
ШИМ в преобладающем большинстве применяется для формирования сигнала синусоидальной формы. Часто ШИМ применяется для управления работой инверторного преобразователя. Инвертор предназначен для преобразования энергии постоянного тока в энергию переменного тока.
Рассмотрим простейшую схему .
![]()
В один момент времени открывается пара транзисторов VT1 и VT3. Создается путь для протекания тока от аккумулятора GB через активно-индуктивную нагрузку RнLн. В следующий момент VT1 и VT3 заперты, а открыты диагонально противоположные транзисторы VT2 и VT4. Теперь тока протекает от аккумулятора через RнLн в противоположном направлении. Таким образом, ток на нагрузке изменяет свое направление, поэтому является переменным. Как видно, ток на нагрузке не является синусоидальным. Поэтому применяют ШИМ для получения синусоидально формы тока.
![]()
Существует несколько типов ШИМ: однополярная, двухполярная, одностороння, двухсторонняя. Здесь мы не будем останавливаться на каждом конкретном типе, а рассмотрим общий подход.
В качестве модулирующего сигнала применяется синусоида, а опорным является сигнал треугольной формы. В результате сравнивания этих сигналов формируются длительности импульсов и пауз (нижний график), которые управляют работой транзисторов VT1…VT4.
Обратите внимание, что амплитуда напряжения на нагрузке всегда равна амплитуде источника питания. Также остается неизменным период следования импульсов. Изменяется лишь ширина открывающего импульса. Поэтому при подключении нагрузки ток, протекающий через нее, будет иметь синусоидальную форму (показано пунктиром на нижнем графике).
Так вот, основное отличие между ШИР и ШИМ заключается в том, что при широтно-импульсном регулировании время импульса и паузы сохраняют постоянное значение. А при широтно-импульсной модуляции изменяются длительности импульсов и пауз, что позволяет реализовать выходной сигнал заданной формы.

Светодиоды используются практически во всех технике вокруг нас. Правда иногда возникает необходимость регулировать их яркость (например, в фонариках, или мониторах). Самым простым выходом в этой ситуации, кажется изменить количество тока, пропускаемого через светодиод. Но это не так. Светодиод – довольно чувствительный компонент. Постоянное изменение количества тока может существенно сократить срок его работы, или вообще сломать. Так же надо учитывать, что нельзя использовать ограничительный резистор, так как в нем будет накапливаться лишняя энергия. При использовании батареек это недопустимо. Еще одна проблема при таком подходе – цвет света будет меняться.
Есть два варианта:
- Регулирование ШИМ
- Аналоговое
Эти методы контролируют проходящий через светодиод ток, но между ними есть определенные различия.
Аналоговое регулирование изменяет уровень тока, который проходит через светодиоды. А ШИМ регулирует частоту подачи тока.
ШИМ-регулирование
Выходом из этой ситуации может быть использование широтно-импульсной модуляции (ШИМ). При такой системе светодиоды получают необходимый ток, а яркость регулируется с помощью подачи питания с высокой частотой. То есть, частота периода подачи изменяет яркость светодиодов.
Несомненный плюс ШИМ-системы – сохранение продуктивности светодиода. КПД составит около 90%.
Виды ШИМ-регулирования
- Двухпроводная. Часто используется в системе освещения машин. Источник питания преобразователя должен иметь схему, которая формирует сигнал ШИМ на DC-выходе.
- Шунтирующее устройство. Чтобы сделать период включении/выключения преобразователя используют шунтирующий компонент, который обеспечивает путь для выходного тока помимо светодиода.
Параметры импульсов при ШИМ
Частота следования импульсов не меняется, поэтому никаких требований в определении яркости света к ней нет. В данном случае, меняется только ширина, или время положительного импульса.

Частота импульсов
Даже с учетом того, что особых претензий к частоте нет, существуют граничные показатели. Они определяются чувствительностью глаза человека к мельканиям. Например, если в кино мелькания кадров должны составлять 24 кадра в секунду, чтобы наш глаз воспринимал его как одно движущееся изображение.
Чтобы мелькания света воспринимались как равномерный свет, частота должна составлять не меньше 200Гц. По верхним показателям ограничений нет, но ниже никак нельзя.
Как работает регулятор ШИМ
Для непосредственного управления светодиодами применяется транзисторный ключевой каскад. Обычно для них используют транзисторы, способные накапливать большие объемы мощности.
Это необходимо при использовании светодиодных лент или мощных светодиодах.
Для небольшого количества или невысокой мощности вполне достаточно использования биполярных транзисторов. Так же можно подключать светодиоды прямо к микросхемам.
Генераторы ШИМ
В системе ШИМ в качестве задающего генератора могут использовать микроконтроллер, или схема, состоящая из схем малой степени интеграции.
Так же возможно создание регулятора из микросхем, которые предназначены для импульсных блоков питания, или логические микросхемы К561, или интегральный таймер NE565.
Умельцы используют в этих целях даже операционный усилитель. Для этого на нем собирается генератор, который можно регулировать.
Одна из наиболее используемых схем основана на таймере 555. По сути, это обычный генератор прямоугольных импульсов. Частота регулируется конденсатором С1. при выходе у конденсатора должно быть высокое напряжение (это равно с соединением с плюсовым источником питания). А заряжается он тогда, когда на выходе присутствует низкое напряжение. Этот момент и дает получение импульсов разной ширины.
Еще одной популярной схемой является ШИМ на основе микросхемы UC3843. в этом случае схема включения изменена в сторону упрощения. Для того, чтобы управлять шириной импульса, используется подача регулирующего напряжения положительной полярности. На выходе в таком случае получается нужный импульсный сигнал ШИМ.
Регулирующее напряжение действует на выход так: при снижении широта увеличивается.

Почему ШИМ?
- Главное преимущество этой системы – легкость. Схемы использования очень просты и легки в реализации.
- Система ШИМ – регулирования дает очень широкий диапазон регулировки яркости. Если говорить о мониторах, то возможно применение CCFL-подсветки, но в таком случае яркость можно уменьшить только в два раза, так как CCFL-подсветка очень требовательна к количеству тока и напряжению.
- Используя ШИМ можно удерживать ток на постоянном уровне, а значит светодиоды не пострадают и цветовая температура меняться не будет.
Недостатки использования ШИМ
- Со временем мерцание изображение может быть довольно заметно, особенно при низкой яркости или движении глаз.
- При постоянном ярком освещении (например, свете солнца) изображение может расплываться.
8. Широтно-импульсная модуляция в преобразователях
8.1. Общие сведения
Принципы импульсного управления и модуляции рассмотрены в гл. 4 на примере простейшей схемы регулятора постоянного тока. При этом даны определения основных видов импульсной модуляции, используемых в теории линейных импульсных систем, которые соответствуют практике управления импульсными преобразователями постоянного тока.
Однако широтно-импульсная модуляция напряжений или токов в преобразователях переменного тока имеет в силовой электронике несколько иное определение, учитывающее особенности ШИМ при решении задач преобразования электроэнергии на переменном токе. Согласно определению МЭК 551-16-30, широтно- импульсной модуляцией называется импульсное управление, при котором ширина или частота импульсов или и та и другая модулируются в пределах периода основной частоты для того, чтобы создать определенную форму кривой выходного напряжения. В большинстве случаев ШИМ осуществляется в целях обеспечения синусоидальности напряжения или тока, т. е. снижения уровня высших гармоник относительно основной (первой) гармоники, и называется синусоидальной. Различают следующие основные методы обеспечения синусоидальности: аналоговая ШИМ и ее модификации; избирательное (селективное) подавление высших гармоник; гистерезисная или дельта-модуляция;
модуляция пространственного вектора.
Классическим вариантом организации аналоговой синусоидальной ШИМ является изменение ширины импульсов, формирующих выходное напряжение (ток) посредством сравнения сигнала напряжения заданной формы, называемого опорным или эталонным, с сигналом напряжения треугольной формы, имеющим более высокую частоту и называемым несущим сигналом. Опорный сигнал является модулирующим и определяющим требуемую форму выходного напряжения (тока). Существует много модификаций этого метода, в которых модулирующие сигналы представлены специальными функциями, отличными от синусоиды. В конспекте лекций будет рассмотрено несколько основных схем поясняющих эти методы ШИМ.
Метод избирательного подавления высших гармоник в настоящее время успешно реализуется средствами микропроцессорных контроллеров на основе программного обеспечения. Гистерезисная модуляция основана на принципах релейного «слежения» за опорным сигналом, например, синусоидальной формы. В простейшем техническом исполнении этот метод сочетает принципы ШИМ и ЧИМ (частотно-импульсной модуляции). Однако посредством специальных схемотехнических мер можно стабилизировать частоту модуляции или ограничить диапазон ее изменения.
Метод модуляции пространственного вектора основан на преобразовании трехфазной системы напряжения в двухфазную и получении обобщенного пространственного вектора. Величина этого вектора рассчитывается в моменты, определяемые основной и модулирующей частотами. Он считается весьма перспективным для управления трехфазными инверторами, в частности, при использовании их в электроприводе. В то же время он во многом сходен с традиционной синусоидальной ШИМ.
Системы управления на основе ШИМ позволяют не только обеспечить синусоидальную форму усредненных значений основной гармоники напряжения или тока, но и управлять значениями ее амплитуды, частоты и фазы. Так как в этих случаях в преобразователе используются полностью управляемые ключи, то становится возможным реализовать работу преобразователей переменного (постоянного) тока совместно с сетью переменного тока во всех четырех квадрантах в режимах как выпрямления, так и инвертирования с любым заданным значением коэффициента мощности основной гармоники cosφ в диапазоне от -1 до 1. Более того, с увеличением несущей частоты расширяются возможности воспроизведения на выходе инверторов тока и напряжения заданной формы. Это позволяет создавать активные фильтры для подавления высших гармоник.
Основные определения, используемые при дальнейшем изложении, рассмотрим на примере применения первого метода в однофазной полу мостовой схеме инвертора напряжения (рис. 8.1, а ). В этой условной схеме ключи S 1 и S 2 представлены полностью управляемыми коммутационными элементами, дополненными последовательно и параллельно соединенными с ними диодами. Последовательные диоды отражают однонаправленную проводимость ключей (например, транзисторов или тиристоров), а параллельные обеспечивают проводимость обратных токов при активно-индуктивной нагрузке.
Диаграммы опорного, модулирующего u M (θ) и несущего u H (θ) сигналов приведены на рис. 8.1, б . Формирование импульсов управления ключами S 1 и S 2 осуществляется по следующему принципу. При u M (θ) > u H (θ) ключ S 1 включен, a S 2 выключен. При u M (θ) < u H (θ) состояния ключей изменяются на противоположные: S 2 - включен, a S 1 - выключен. Таким образом, на выходе инвертора формируется напряжение в виде двух полярных импульсов. В реальных схемах для исключения одновременной проводимости ключей S 1 и S 2 следует предусматривать определенную задержку между моментами формирования сигналов на включение этих ключей. Очевидно, что ширина импульсов зависит от соотношения амплитуд сигналов u M (θ) и u H (θ). Параметр, характеризующий это соотношение, называется индексом амплитудной модуляции и определяется по формуле (8.1):
, (8.1.)
где U M m и U H m - максимальные значения модулирующего сигнала u M (θ) и несущего сигнала u H (θ) соответственно.


Рис. 8.1. Однофазный полу мостовой инвертор напряжения: а – схема; б – диаграммы напряжения при импульсной модуляции
Частота несущего сигнала u H (θ) равна частоте коммутации f H ключей S 1 и S 2 и обычно значительно превышает частоту модулирующего сигнала f M . Соотношение частот f H и f M является важным показателем эффективности процесса модуляции и называется индексом частотной модуляции, который определяется по формуле (8.2):
При малых значениях M f сигналы u M (θ) и u H (θ) должны быть синхронизированы, чтобы избежать появления нежелательных субгармоник. В в качестве максимального значения My , определяющего необходимость синхронизации, устанавливается М f = 21. Очевидно, что при синхронизированных сигналах и коэффициент M f является постоянной величиной.
Из диаграммы на рис. 8.1 видно, что амплитуда первой гармоники выходного напряжения U am 1 может быть с учетом (8.1) представлена в следующем виде (8.3):
![]() (8.3)
(8.3)
Согласно (8.3) при М a = 1 амплитуда первой гармоники выходного напряжения равна высоте прямоугольника полуволн U d /2. Характерная зависимость относительного значения первой гармоники выходного напряжения от значения М a представлена на рис. 8.2, из которого видно, что изменение М a от 0 до 1 линейно и зависит от амплитуды U am 1 . Предельное значение величины М a определяется принципом рассматриваемого вида модуляции, согласно которому максимальное значение U am 1 ограничено высотой полуволны прямоугольной формы, равной U d /2. При дальнейшем увеличении коэффициента М a модуляция приводит к нелинейному возрастанию амплитуды U am 1 до максимального значения, определяемого формированием на выходе инвертора напряжения прямоугольной формы, которое в дальнейшем остается неизменным.
Разложение прямоугольной функции в ряд Фурье дает максимальное значение (8.4):
![]() (8.4)
(8.4)
Эта величина ограничивается значением индекса М а, изменяющегося в диапазоне от 0 до примерно 3. Очевидно, что функция на интервале а-б значений от 1 до 3,2 является нелинейной (рис. 8.2). Режим работы на этом участке называется сверх модуляцией.
Значение M f определяется выбором частоты несущего сигнала u H (θ) и существенно влияет на технические характеристики преобразователя. С ростом частоты увеличиваются коммутационные потери в силовых ключах преобразователей, но при этом улучшается спектральный состав выходного напряжения и упрощается решение задачи фильтрации высших гармоник, обусловленных процессом модуляции. Важным фактором выбора значения f H во многих случаях является необходимость обеспечения его значения в звуковом диапазоне частоты более 20 кГц. При выборе f H следует также учитывать уровень рабочих напряжений преобразователя, его мощность и другие параметры.

Рис. 8.2. Зависимость относительного значения амплитуды основной гармоники выходного напряжения от индекса амплитудной модуляции для однофазной полу мостовой схемы
Общей тенденцией здесь является рост значений M f преобразователей малой мощности и низких напряжений и наоборот. Поэтом выбор M f является многокритериальной оптимизационной задачей.
Импульсная модуляция со стохастическим процессом . Использование ШИМ в преобразователях связано с появлением высших гармоник в модулируемых напряжениях и токах. При этом в спектральном составе этих параметров наиболее значительные гармоники возникают на частотах, кратных индексу частотной модуляции M f и сгруппированных около них на боковых частотах гармоник с убывающими амплитудами. Высшие гармоники могут порождать следующие основные проблемы:
возникновение акустических шумов;
ухудшение электромагнитной совместимости (ЭМС) с другими электротехническими устройствами или системами.
Основными источниками акустических шумов являются электромагнитные компоненты (дроссели и трансформаторы), на которые воздействуют ток и напряжение, содержащие высшие гармоники с частотами звукового диапазона. Следует отметить, что шумы могут возникать на определенных частотах, где высшие гармоники имеют максимальное значение. Факторы, вызывающие шумы, например явление магнитострикции, усложняют разрешение проблемы ЭМС. Проблемы с ЭМС могут возникать в широком частотном диапазоне в зависимости от критичности к уровню электромагнитных помех электротехнических устройств. Традиционно для снижения уровня шумов использовались конструктивные и технологические решения, а для обеспечения ЭМС применялись пассивные фильтры.
В качестве перспективного направления решения этих проблем рассматриваются методы, связанные с изменением характера спектрального состава модулируемых напряжений и токов. Сущность этих методов состоит в выравнивании частотного спектра и снижении амплитуды явно выраженных гармоник за счет стохастического их распределения в широком частотном диапазоне. Такой прием иногда называется «размазыванием» частотного спектра. Концентрация энергии помех уменьшается на частотах, где гармоники могут иметь максимальные значения. Реализация этих методов не связана с воздействием на компоненты силовой части преобразователей и в большинстве случаев ограничена программными средствами с незначительным изменением системы управления.
Рассмотрим кратко принципы реализации этих методов. В основе ШИМ лежит изменение коэффициента заполнения γ= t и / T n , где t и - длительность импульса; Т n - период его формирования. Обычно эти величины, а также положение импульса на интервале периода Т n являются постоянными в установившихся режимах. Результаты ШИМ определяются как интегральные усредненные значения. В этом случае детерминированные значения t и и включая положение импульса, обусловливают неблагоприятный спектральный состав модулируемых параметров. Если этим величинам придать случайный характер при сохранении заданного значения γ, то процессы становятся стохастическими и спектральный состав модулируемых параметров изменяется. Например, такой случайный характер можно придать положению импульса t и на интервале периода Т n или обеспечить стохастическое изменение последнего. Для этой цели может использоваться генератор случайных чисел, воздействующий на задающий генератор частоты модуляции f n =1/T n . Аналогичным образом можно изменять положение импульса на интервале Т n с математическим ожиданием, равным нулю. Усредненное интегральное значение γ должно оставаться на заданном системой регулирования уровне, в результате чего будет реализовано выравнивание спектрального состава высших гармоник в модулируемых напряжениях и токах.
Вопросы для самоконтроля
1. Перечислите основные методы ШИМ для обеспечения синусоидальности тока или напряжения.
2. В чем отличие однополярной модуляции напряжения от двухполярной?
3. Перечислите основные параметры ШИМ.
4. С какой целью используется ШИМ со стохастическими процессами?
Непонимание работы ШИМ или PWM (Pulse-width modulation ) часто приводит не только к их неправильному использованию, но даже к ошибкам в проектировании устройств использующих ШИМ для управления. Здесь, ограничившись конкретным применением, я попытаюсь рассказать что такое ШИМ, для чего она требуется и как работает.
Сначала, что такое ШИМ.
Когда нужна ШИМ
Главной причиной применения ШИМ является необходимость обеспечить пониженным постояннымнапряжением силовых устройств электроники при сохранении высокого КПД, особенно в управляемых электроприводах.
Во внутренних сетях аппаратуры для питания устройств используется постоянное напряжение ограниченного набора напряжений, которые часто требуется изменить под требования конкретного устройства, стабилизировать или регулировать его. Это могут быть электроприводы постоянного тока, чипы, узлы радиоаппаратуры.
Регулировку можно осуществлять с помощью гасящих напряжение устройств: резисторов, транзисторов (если требуется регулировка). Главный недостаток такого решения потери мощности и повышенное тепловыделение на регулирующих устройствах.
Поскольку известно что выделяемая мощность равна:
P = I x U или P = I 2 x R Вт.
то чем больше ток I в цепи и падение напряжения U , тем больше потери мощности.Здесь R - величина сопротивления регулирующего элемента.
Представьте что требуется погасить хотя бы 3V при токе нагрузки 10A , это уже 30 Вт истраченных в пустую. А каждый ватт теряемой мощности не только снижает продолжительность работы источников питания, но и требует дополнительного оборудования для вывода выделяемого, этой мощностью, тепла.
Это относится к гасящим резисторам и полупроводниковым приборам тоже.
Но хорошо известно, что полупроводниковые приборы очень хорошо (с малыми потерями и тепловыделением) работают как ключи, когда имеют только два состояния открыт/закрыт.
Этот режим позволяет снизить потери на коммутирующем полупроводниковом приборе до уровня:
P max = I x U нас
U нас для современных полупроводниковых коммутаторов приближается к 0,3v и при потребляемых токах 10 А потери мощности будут приближаться к 3 Вт. Это в режиме ключа, а при работе в устройствах ШИМ и меньше.
|
В
ШИМ в качестве ключевых элементов использует полупроводниковые
приборы
в ключевом режиме, то есть транзистор всё время или разомкнут
(выключен), или замкнут (находится в состоянии насыщения). В первом случае транзистор имеет почти бесконечное сопротивление, поэтому ток в цепи весьма мал, и, хотя всё напряжение питания падает на транзисторе, выделяемая на транзисторе мощность практически равна нулю. Во втором случае сопротивление транзистора крайне мало, и, следовательно, падение напряжения на нём близко к нулю - выделяемая мощность также мала. В переходных состояниях (переход ключа из проводящего состояния в непроводящее и обратно) мощность выделяемая в ключе значительна, но так как длительность переходных состояний крайне мала, по отношению к периоду модуляции, то средняя мощность потерь на переключение оказывается незначительной. |
Реализовать преимущества ключевого режима в схемах понижающих и регулирующих напряжение постоянного тока, позволило использование ШИМ.
Повторюсь, широтно-импульсная модуляция - управление средним значением напряжения на интегрирующей нагрузке путём изменения скважностиимпульсов, с помощью управляющего ключа.
Работа ШИМ на интегрирующую нагрузку показана на рис. 1.
Рисунок 1
Главным условиям такого применения ШИМ является наличие интегрирующей нагрузки.
Потому что амплитудное значение напряжения равно E .
Это могут быть интегрирующая RC, LC, RLC или RL цепи и механические интеграторы (например электромотор).
При работе ШИМ на интегрирующей нагрузке напряжение - эквивалентное постоянное напряжение изменяется в зависимости от скважности (Q ) импульсов.
Q = t и /T < 1
здесь: Q - скважность, t и - длительность импульса, T - период следования импульсов.
С учетом скважности эквивалентное постоянное напряжение будет равно:
E экв = Q x E Вольт
здесь: E экв - эквивалентное постоянное напряжение (Вольт ), Q - скважность, E - напряжение источника от которого запитан ШИМ преобразователь (Вольт ).
Реально на зажимы нагрузки ШИМ подается напряжение равное E , а работа совершаемая электрическим током (или число оборотов электродвигателя) определяется именно E экв. При восстановлении на интегрирующем конденсаторе получаем именно напряжение E экв.
Мощность выделяемая на управляющем ключе, управляемом ШИМ равна:
P max = Q х I x U нас
Схема подключения нагрузки к ШИМ.
Никаких отличных от схемы включения электродвигателя на постоянном токе (частный случай нагрузки) схемных решений ШИМ не требует. Просто электродвичатель подключается к источнику питания работающего в режиме ШИМ. Разве что, в определенных ситуациях требуется ввести дополнительную фильтрацию помех возникающих на фронтах импульсов. Этот фильтр на рис. 2 в виде конденсаторов и демпфирующего диода.

Рисунок 2
На рис. 2 показано такое подключение.
Мы видим, что коммутатор (полевой транзистор) можно просто заменить на переменный резистор.
Схема PWM
В статье "Переходник для вентилятора 3 pin на 4 pin" http://de1fer.ru/?p=45#more-45 владелец блога приводит схему вентилятора с P WM .

Рисунок 3
здесь: GND - земля (общий), Control - контакт P WM управления, +12 - напряжение питания, Sense - вывод датчика оборотов.
В данной схеме управление возможно скорее постоянным током +I упр, чем ШИМ сигналом.
Для управления импульсным (ШИМ) сигналом требуется схема изображенная на рис. 4.Да и судя по параметрам транзистора "PWM" он выбирался именно для управления постоянным током. По крайней мере он будет нормально работать в таком режиме с вентилятором до 1,6 Вт.

Рисунок 4
А вот в импульсном режиме без конденсатора C , транзистор BC879 будет греться немного меньше чем на постоянном токе и возможен останов электродвигателя на малых длительностях токового импульса (малых оборотах) из-за его интегрирования на входной емкости C вх транзистора.
Основные параметры кремниевого биполярного высокочастотного n-p-n транзистора BC879 от SIEMENS
| Pc max | Ucb max | Uce max | Ueb max | Ic max | Tj max, °C | Ft max |
| 800mW | 100V | 80V | 5V | 1A | 150°C | 200MHz |
В случае необходимости отключить PWM (ШИМ) управление в схеме показанной на рис. 3 необходимо просто соединить вывод Control с проводом +12v .
Есть другой вариант схемы вентилятора с P WM на форуме Radeon.ru

Рисунок 5
Существенных отличий от рис. 3 нет, только в качестве управляемого ШИМ ключа используется МОП полевой транзистор со встроенным или индуцированным каналом p- типа. Данная схема тоже может управляться как P WM так и постоянным напряжением (но рисковать не стоит - надо знать параметры транзистора).
Данная схема вполне работоспособна и не имеет недостатков схемы показанной на рис. 3.
Для отключения (в зависимости от типа транзистора) достаточно соединить вывод Control с проводом + или -.
Вниманию самодельщиков!
В случае если Вас не устраивает алгоритм управления PWM встроенного на материнскую (системную) плату.
И у Вас есть устраивающий Вас реобас (контроллер управления вентилятором), то используйте вентилятор с 3-pin соединитель.
Если вентилятор с PWM вам дорог или не имеет замены - то необходимо отключить PWM , способом описанным выше, заменив соединитель 4-pin на 3-pin и подключить к реобасу.
Но помните применение вентилятора с PWM в любом нештатном режиме не позволит достичь его максимальной производительности.
Применение одновременно с PWM - токового управления на постоянном токе не рекомендуется по причине снижение напряжения питания вентилятора на 10-20%, что не даст вывести такой вентилятор на полную производительность.
Применение одновременно с PWM - ШИМ по цепи питания может привести к периодической нестабильности работы вентилятора (возможно возникновение скользящих биений между частотами PWM - ШИМ по цепи питания систем) и создать неоднозначность для систем оснащенных системой стабилизации оборотов. Кроме того как и в предыдущем случае на 10-15% снизится результирующее напряжение на вентиляторе, что не даст вывести такой вентилятор на полную производительность.
Так что остановитесь на чем-то одном. Или используйте вентилятор с PWM , или применяйте внешнее управление вентилятором по цепи питания на вентиляторе с 3-pin разъемом.
Заключение
Применение PWM или,как привыкли говорить мы, ШИМ повышает КПД понижающих напряжение устройств постоянного тока, что снижает общее тепловыделение электронных устройств с ШИМ.
ШИМ позволяет создавать компактные системы регулируемого электропривода постоянного тока большой мощности.
В современных устройствах постоянного тока управляющих напряжением и понижающих стабилизаторах напряжениях обычно регулировки выполняются с помощью ШИМ. Для этого выпускаются контроллеры требующие минимум навесных элементов.
Гасящим резисторам и реостатам сейчас можно сказать - прощай!
подготовил А.Сорокин,